 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
本說明書整理了很多四旋翼搭建的基礎(chǔ)知識,從零開始到搭建完成。還包含了其他相關(guān)的內(nèi)容
四旋翼飛行器結(jié)構(gòu)及控制原理四軸飛行器,又稱四旋翼飛行器、四旋翼直升機(jī),簡稱四軸、四旋翼。這四軸飛行器(Quadrotor)是一種多旋翼飛行器它有四個(多個)螺旋槳。四軸(多軸)飛行器也是飛行器中結(jié)構(gòu)最簡單的飛行器了,四軸飛行器的四個螺旋槳都是電機(jī)直連的簡單機(jī)構(gòu),前后左右各一個,其中位于中心的主控板接收來自于遙控發(fā)射機(jī)的控制信號,在收到操作者的控制后通過數(shù)字的控制總線去控制四個電調(diào),電調(diào)再把控制命令轉(zhuǎn)化為電機(jī)的轉(zhuǎn)速,以達(dá)到操作者的控制要求,前后馬達(dá)是順時針轉(zhuǎn)動,需要安裝反槳,左右馬達(dá)是逆時針轉(zhuǎn)動,需要安裝正槳,機(jī)械結(jié)構(gòu)上只需保持重量分布的均勻,四電機(jī)保持在一個水平線上,可以說結(jié)構(gòu)非常簡單,做四軸的目的也是為了用電子控制把機(jī)械結(jié)構(gòu)變得盡可能的簡單。十字形的布局允許飛行器通過改變電機(jī)轉(zhuǎn)速獲得旋轉(zhuǎn)機(jī)身的力,從而調(diào)整自身姿態(tài)。具體的技術(shù)細(xì)節(jié)在“基本運動原理”中講述。 因為它固有的復(fù)雜性,歷史上從未有大型的商用四軸飛行器。 近年來得益于微機(jī)電控制技術(shù)的發(fā)展,穩(wěn)定的四軸飛行器得到了廣泛的關(guān)注,應(yīng)用前景十分可觀。國際上比較知名的四軸飛行器公司有中國大疆創(chuàng)新公司、法國 Parrot 公司、德國 AscTec 公司和美國 3D Robotics 公司。
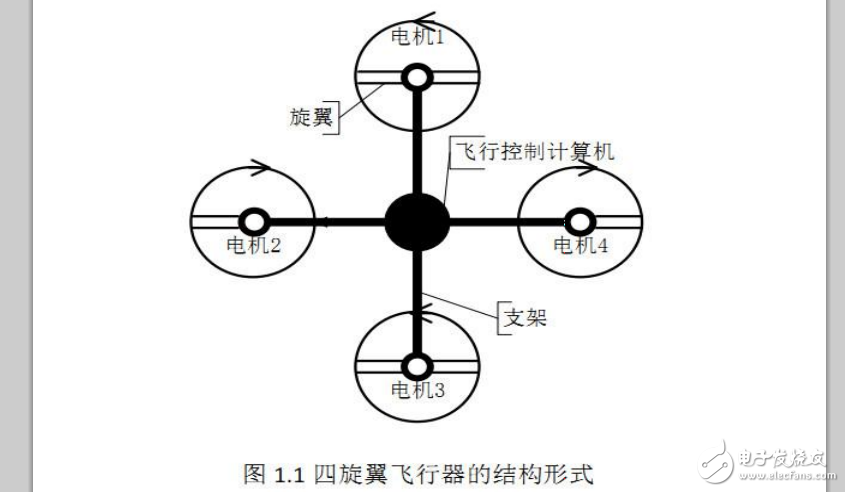
1.結(jié)構(gòu)形式旋翼對稱分布在機(jī)體的前后、左右四個方向,四個旋翼處于同一高度平面,且四個旋翼的結(jié)構(gòu)和半徑都相同,四個電機(jī)對稱的安裝在飛行器的支架端,支架中間空間安放飛行控制計算機(jī)和外部設(shè)備。結(jié)構(gòu)形式如圖 1.1 所示。
組成四旋翼需要:無刷電機(jī)(4 個)電子調(diào)速器(簡稱電調(diào),4 個)螺旋槳(4 個,需要 2 個正漿,2 個反漿)飛行控制板電池(11.1v 航模動力電池)遙控器(最低四通道遙控器)機(jī)架(非必選)充電器(盡量選擇平衡充電器)
2.控制原理四軸飛行器的控制原理就是,當(dāng)沒有外力并且重量分布平均時,四個螺旋槳以一樣的轉(zhuǎn)速轉(zhuǎn)動,在螺旋槳向上的拉力大于整機(jī)的重量時,四軸就會向上升,在拉力與重量相等時,四軸就可以在空中懸停。在四軸的前方受到向下的外力時,前方馬達(dá)加快轉(zhuǎn)速,以抵消外力的影響從而保持水平,同樣其它幾個方向受到外力時四軸也是可以通過這種動作保持水平的,當(dāng)需要控制四軸向前飛時,前方的馬達(dá)減速,而后方的馬達(dá)加速,這樣,四軸就會向前傾斜,也相應(yīng)的向前飛行,同樣,需要向后、向左、向右飛行也是通過這樣的控制就可以使四軸往我們想要控制的方向飛行了,當(dāng)我們要控制四軸的機(jī)頭方向向順時針轉(zhuǎn)動時,四軸同時加快左右馬達(dá)的轉(zhuǎn)速,并同時降低前后馬達(dá)的轉(zhuǎn)速,因為左右馬達(dá)是逆時針轉(zhuǎn)動的,而左右馬達(dá)的轉(zhuǎn)速是一樣,所以左右是保持平衡的,而前后馬達(dá)是順時針轉(zhuǎn)動的,但前后馬達(dá)的轉(zhuǎn)速也是一樣的,所以前后左右都是可以保持平衡,飛行高度也是可以保持的,但是逆時針轉(zhuǎn)動的力比順時針就大,所以機(jī)身會向反方向轉(zhuǎn)動,從而達(dá)到控制機(jī)頭的方向。這也是為什么要使用兩個反槳,兩個正槳的原因。
- 四旋翼自主飛行器探測跟蹤系統(tǒng)
- 多旋翼飛行器設(shè)計與控制的前景展望 0次下載
- 多旋翼飛行器設(shè)計與控制的底層飛行控制 0次下載
- 四旋翼飛行器懸停算法設(shè)計與實現(xiàn) 6次下載
- 多旋翼無人機(jī)飛行器的入門學(xué)習(xí)資料和實踐說明 13次下載
- 四旋翼飛行器的發(fā)展現(xiàn)狀和飛行控制算法的研究仿真 29次下載
- 關(guān)于四旋翼飛行器ppt資料下載 6次下載
- 四旋翼飛行器設(shè)計案例分析 9次下載
- 四旋翼飛行器的設(shè)計與制作 15次下載
- 四旋翼四軸飛行器設(shè)計 11次下載
- 四旋翼飛行器的數(shù)學(xué)模型 28次下載
- 4 2013年四旋翼飛行器論文 1次下載
- 微型四旋翼飛行器的設(shè)計與實現(xiàn) 53次下載
- 四旋翼飛行器資料 80次下載
- 四旋翼飛行器基本知識 0次下載
- 多旋翼無人機(jī)是如何構(gòu)造的有哪些部位詳細(xì)說明 1.6w次閱讀
- 多旋翼無人機(jī)的飛行原理是什么詳細(xì)講解 3.2w次閱讀
- 淺談四旋翼飛行器的設(shè)計 7390次閱讀
- 星翼電子:MiniFly開源四軸飛行器信息描述 2467次閱讀
- 淺析多旋翼無人機(jī)的傳感器技術(shù) 1.1w次閱讀
- 基于STM32四軸飛行器電路設(shè)計的詳細(xì)圖解資料概述 1.6w次閱讀
- 無人機(jī)旋翼個數(shù)決定了什么?四、六、八旋翼有什么區(qū)別? 2.2w次閱讀
- 四軸飛行器如何對頻_四軸飛行器怎么操作 9.9w次閱讀
- 四軸飛行器什么牌子好_十大四軸飛行器品牌排行版 1.6w次閱讀
- 基于STM32的四旋翼飛行姿態(tài)串級控制的設(shè)計與實現(xiàn) 7953次閱讀
- 基于STM32的簡易四軸飛行器系統(tǒng)的設(shè)計實現(xiàn) 1.7w次閱讀
- 四軸飛行器怎么起飛_四軸飛行器原理 4.9w次閱讀
- 基于STM32的四軸飛行器電路設(shè)計—電路精選(53) 4w次閱讀
- 如何設(shè)計無人機(jī)飛行 3904次閱讀
- 教你DIY一個四軸飛行器 8096次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1494次下載 | 免費
- 2單片機(jī)典型實例介紹
- 18.19 MB | 97次下載 | 1 積分
- 3S7-200PLC編程實例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 12次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7藍(lán)牙設(shè)備在嵌入式領(lǐng)域的廣泛應(yīng)用
- 0.63 MB | 3次下載 | 免費
- 89天練會電子電路識圖
- 5.91 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關(guān)電源設(shè)計實例指南
- 未知 | 21540次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論