 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
項(xiàng)目背景及可行性分析
1.項(xiàng)目名稱、項(xiàng)目的主要內(nèi)容及目前的進(jìn)展情況
項(xiàng)目名稱: 基于FPGA的組合導(dǎo)航系統(tǒng)
項(xiàng)目的主要內(nèi)容及目前的進(jìn)展情況:本項(xiàng)目主要研究基于MicoBlaze導(dǎo)航處理器的組合導(dǎo)航的作用原理及其實(shí)現(xiàn)。目前已經(jīng)完成大部分軟件程序的編制,現(xiàn)已完成外圍電路模塊的研制工作。
2.項(xiàng)目關(guān)鍵技術(shù)及創(chuàng)新點(diǎn)的論述;
(1) 采用低成本MEMS加速度計(jì)和陀螺儀設(shè)計(jì)慣導(dǎo)單元。
(2) 引入3軸磁阻傳感器解決慣導(dǎo)單元的初始對(duì)準(zhǔn)問題。
(3) 采用GPS+IMU+COMPASS的結(jié)構(gòu)來設(shè)計(jì)自主導(dǎo)航系統(tǒng)。
(4) 多傳感器冗余技術(shù),滿足多種需要。
(5) 采用氣壓計(jì)獲得高度信息。
(6) 基于MEMS慣性器件的初始對(duì)準(zhǔn)。
(7) 采用Labview設(shè)計(jì)系統(tǒng)演示界面。
3.技術(shù)成熟性和可靠性論述:
微型慣性傳感器與傳統(tǒng)的慣性傳感器相比,具有體積小,重量輕,成本低,功耗低,可靠性高和壽命長(zhǎng)等優(yōu)勢(shì)。在車輛導(dǎo)航和控制,機(jī)器人,無人機(jī)導(dǎo)航,武器制導(dǎo)等領(lǐng)域有著廣闊的應(yīng)用前景。然而目前其精度還比較低,導(dǎo)致其應(yīng)用受到一定的限制。GPS接收機(jī)與微型慣性測(cè)量單元的結(jié)合可以取長(zhǎng)補(bǔ)短,大大提高輸出數(shù)據(jù)更新率,防止導(dǎo)航定位誤差隨時(shí)間積累,并且提高了可靠性和抗干擾能力,為低成本,輕小型導(dǎo)航與制導(dǎo)系統(tǒng)提供了一個(gè)非常有吸引力的方案,成為設(shè)計(jì)者的最佳選擇,也是目前導(dǎo)航定位技術(shù)發(fā)展的主要方向之一。
目前購(gòu)買一套國(guó)外的低成本的組合導(dǎo)航裝置的價(jià)錢也在10萬元以上,為了降低成本使導(dǎo)航裝置更加符合車輛等民用場(chǎng)合的導(dǎo)航。我們采用ADI的低成本的加速度計(jì)和陀螺儀利用PowerPc處理器設(shè)計(jì)了一個(gè)完備的導(dǎo)航系統(tǒng)。
項(xiàng)目實(shí)施方案
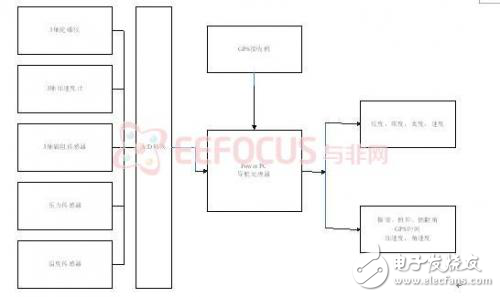
1.方案基本功能框圖及描述
2.需要的開發(fā)平臺(tái)
經(jīng)過詳細(xì)的分析論證本方案采用Spartan-3E開發(fā)平臺(tái)進(jìn)行設(shè)計(jì)完全可以滿足系統(tǒng)的需求。
3.方案實(shí)施過程中需要開發(fā)的模塊
本方案中需要研制慣性導(dǎo)航單元,主要包括電子羅盤模塊,壓力計(jì)模塊,加速度模塊,陀螺儀模塊和溫度模塊。以上模塊都采用自己購(gòu)買相應(yīng)元器件進(jìn)行開發(fā)的方式進(jìn)行。
4.系統(tǒng)最終要達(dá)到的性能指標(biāo)
論述本項(xiàng)目最終完成時(shí)所設(shè)想達(dá)到的目標(biāo)。
本方案最終要達(dá)到一下目標(biāo)
精確而實(shí)時(shí)位置坐標(biāo)。
不受動(dòng)態(tài)學(xué)影響的高精度航向角。
經(jīng)氣壓高度表校正后的精確海拔高度。
精確的沿著3個(gè)軸向的速率和加速度。
精確的3個(gè)軸向角速度。
需要的其它資源
1.設(shè)計(jì)輸入輸出功能子板
子版采用SPI接口與主板通信,輸出口采用主板上的串行口進(jìn)行輸出。
2.測(cè)試設(shè)備
測(cè)試設(shè)備目前僅有萬用表、示波器這兩個(gè)設(shè)備。
3.方針、開發(fā)工具
ISE,Embedded Development Kit (EDK) and Platform Studio,modsim。
?
1.項(xiàng)目名稱、項(xiàng)目的主要內(nèi)容及目前的進(jìn)展情況
項(xiàng)目名稱: 基于FPGA的組合導(dǎo)航系統(tǒng)
項(xiàng)目的主要內(nèi)容及目前的進(jìn)展情況:本項(xiàng)目主要研究基于MicoBlaze導(dǎo)航處理器的組合導(dǎo)航的作用原理及其實(shí)現(xiàn)。目前已經(jīng)完成大部分軟件程序的編制,現(xiàn)已完成外圍電路模塊的研制工作。
2.項(xiàng)目關(guān)鍵技術(shù)及創(chuàng)新點(diǎn)的論述;
(1) 采用低成本MEMS加速度計(jì)和陀螺儀設(shè)計(jì)慣導(dǎo)單元。
(2) 引入3軸磁阻傳感器解決慣導(dǎo)單元的初始對(duì)準(zhǔn)問題。
(3) 采用GPS+IMU+COMPASS的結(jié)構(gòu)來設(shè)計(jì)自主導(dǎo)航系統(tǒng)。
(4) 多傳感器冗余技術(shù),滿足多種需要。
(5) 采用氣壓計(jì)獲得高度信息。
(6) 基于MEMS慣性器件的初始對(duì)準(zhǔn)。
(7) 采用Labview設(shè)計(jì)系統(tǒng)演示界面。
3.技術(shù)成熟性和可靠性論述:
微型慣性傳感器與傳統(tǒng)的慣性傳感器相比,具有體積小,重量輕,成本低,功耗低,可靠性高和壽命長(zhǎng)等優(yōu)勢(shì)。在車輛導(dǎo)航和控制,機(jī)器人,無人機(jī)導(dǎo)航,武器制導(dǎo)等領(lǐng)域有著廣闊的應(yīng)用前景。然而目前其精度還比較低,導(dǎo)致其應(yīng)用受到一定的限制。GPS接收機(jī)與微型慣性測(cè)量單元的結(jié)合可以取長(zhǎng)補(bǔ)短,大大提高輸出數(shù)據(jù)更新率,防止導(dǎo)航定位誤差隨時(shí)間積累,并且提高了可靠性和抗干擾能力,為低成本,輕小型導(dǎo)航與制導(dǎo)系統(tǒng)提供了一個(gè)非常有吸引力的方案,成為設(shè)計(jì)者的最佳選擇,也是目前導(dǎo)航定位技術(shù)發(fā)展的主要方向之一。
目前購(gòu)買一套國(guó)外的低成本的組合導(dǎo)航裝置的價(jià)錢也在10萬元以上,為了降低成本使導(dǎo)航裝置更加符合車輛等民用場(chǎng)合的導(dǎo)航。我們采用ADI的低成本的加速度計(jì)和陀螺儀利用PowerPc處理器設(shè)計(jì)了一個(gè)完備的導(dǎo)航系統(tǒng)。
項(xiàng)目實(shí)施方案
1.方案基本功能框圖及描述
2.需要的開發(fā)平臺(tái)
經(jīng)過詳細(xì)的分析論證本方案采用Spartan-3E開發(fā)平臺(tái)進(jìn)行設(shè)計(jì)完全可以滿足系統(tǒng)的需求。
3.方案實(shí)施過程中需要開發(fā)的模塊
本方案中需要研制慣性導(dǎo)航單元,主要包括電子羅盤模塊,壓力計(jì)模塊,加速度模塊,陀螺儀模塊和溫度模塊。以上模塊都采用自己購(gòu)買相應(yīng)元器件進(jìn)行開發(fā)的方式進(jìn)行。
4.系統(tǒng)最終要達(dá)到的性能指標(biāo)
論述本項(xiàng)目最終完成時(shí)所設(shè)想達(dá)到的目標(biāo)。
本方案最終要達(dá)到一下目標(biāo)
精確而實(shí)時(shí)位置坐標(biāo)。
不受動(dòng)態(tài)學(xué)影響的高精度航向角。
經(jīng)氣壓高度表校正后的精確海拔高度。
精確的沿著3個(gè)軸向的速率和加速度。
精確的3個(gè)軸向角速度。
需要的其它資源
1.設(shè)計(jì)輸入輸出功能子板
子版采用SPI接口與主板通信,輸出口采用主板上的串行口進(jìn)行輸出。
2.測(cè)試設(shè)備
測(cè)試設(shè)備目前僅有萬用表、示波器這兩個(gè)設(shè)備。
3.方針、開發(fā)工具
ISE,Embedded Development Kit (EDK) and Platform Studio,modsim。
?
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于DSP/BIOS多線程的小型組合導(dǎo)航系統(tǒng)設(shè)計(jì)
- 組合導(dǎo)航系統(tǒng)中里程儀快速標(biāo)定法
- 車載GPS/DR組合導(dǎo)航系統(tǒng)硬件設(shè)計(jì)解析 0次下載
- DSP與FPGA結(jié)合的車載GPS/DR組合導(dǎo)航系統(tǒng)硬件系統(tǒng)設(shè)計(jì)分析 1次下載
- 車載GPS/DR組合導(dǎo)航系統(tǒng)硬件設(shè)計(jì) 1次下載
- 基于ARM的移動(dòng)機(jī)器人組合導(dǎo)航系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn) 5次下載
- 基于Cortex_M4的多傳感器組合導(dǎo)航系統(tǒng)設(shè)計(jì)_楊歡 1次下載
- 基于可觀性因子的MINSGPS緊組合導(dǎo)航系統(tǒng)設(shè)計(jì)王翠 1次下載
- 基于FPGAs的智能機(jī)器人導(dǎo)航系統(tǒng) 5次下載
- MIMU_GPS組合導(dǎo)航系統(tǒng)小型化設(shè)計(jì) 7次下載
- 陸用車載組合導(dǎo)航系統(tǒng)里程儀快速標(biāo)定 36次下載
- 基于ARM和DSP的組合導(dǎo)航系統(tǒng)設(shè)計(jì) 181次下載
- 基于GPS的小型組合導(dǎo)航系統(tǒng)設(shè)計(jì) 58次下載
- 基于MIMU、GPS組合導(dǎo)航系統(tǒng)的應(yīng)用研究
- 慣性北斗雙星組合導(dǎo)航系統(tǒng)研究
- 汽車導(dǎo)航系統(tǒng)的主要功能有哪些 2515次閱讀
- 自動(dòng)駕駛高精組合導(dǎo)航設(shè)備拆解-導(dǎo)遠(yuǎn)570D 3848次閱讀
- 北斗衛(wèi)星導(dǎo)航系統(tǒng)規(guī)模應(yīng)用國(guó)際化發(fā)展戰(zhàn)略研究 1814次閱讀
- 基于IMU和地磁傳感器的捷聯(lián)慣性導(dǎo)航系統(tǒng) 7648次閱讀
- 基于Linux和MPC823E嵌入式處理器實(shí)現(xiàn)船舶導(dǎo)航系統(tǒng)的設(shè)計(jì) 2707次閱讀
- 基于GPS和航位推算技術(shù)實(shí)現(xiàn)組合導(dǎo)航系統(tǒng)的應(yīng)用方案 4680次閱讀
- 嵌入式導(dǎo)航系統(tǒng)是在怎樣的設(shè)計(jì)下實(shí)現(xiàn)的 990次閱讀
- 嵌入式導(dǎo)航系統(tǒng)如何設(shè)計(jì)實(shí)現(xiàn) 1721次閱讀
- 慣性導(dǎo)航的工作原理及慣性導(dǎo)航系統(tǒng)分類 3.5w次閱讀
- 三分鐘了解慣性導(dǎo)航系統(tǒng)、加速度計(jì)、陀螺儀的工作原理 6.9w次閱讀
- 基于MSP430F149的室外移動(dòng)機(jī)器人高精度組合導(dǎo)航系統(tǒng) 2996次閱讀
- 基于FPGA的慣性導(dǎo)航系統(tǒng)設(shè)計(jì) 3116次閱讀
- 基于雙口RAM的組合導(dǎo)航系統(tǒng)設(shè)計(jì)與應(yīng)用 1329次閱讀
- 衛(wèi)星導(dǎo)航系統(tǒng)基帶偽碼完整系統(tǒng)解決方案 1439次閱讀
- 基于DSP的車載導(dǎo)航系統(tǒng)硬件電路設(shè)計(jì)與實(shí)現(xiàn) 2867次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DC電源插座圖紙
- 0.67 MB | 3次下載 | 免費(fèi)
- 2AN-1267: 使用ADSP-CM408F ADC控制器的電機(jī)控制反饋采樣時(shí)序
- 1.41MB | 3次下載 | 免費(fèi)
- 3AN158 GD32VW553 Wi-Fi開發(fā)指南
- 1.51MB | 2次下載 | 免費(fèi)
- 4AN148 GD32VW553射頻硬件開發(fā)指南
- 2.07MB | 1次下載 | 免費(fèi)
- 5AN111-LTC3219用戶指南
- 84.32KB | 次下載 | 免費(fèi)
- 6AN153-用于電源系統(tǒng)管理的Linduino
- 1.38MB | 次下載 | 免費(fèi)
- 7AN-283: Σ-Δ型ADC和DAC[中文版]
- 677.86KB | 次下載 | 免費(fèi)
- 8SM2018E 支持可控硅調(diào)光線性恒流控制芯片
- 402.24 KB | 次下載 | 免費(fèi)
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 450次下載 | 免費(fèi)
- 2免費(fèi)開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 138次下載 | 1 積分
- 3基于STM32單片機(jī)智能手環(huán)心率計(jì)步器體溫顯示設(shè)計(jì)
- 0.10 MB | 130次下載 | 免費(fèi)
- 4使用單片機(jī)實(shí)現(xiàn)七人表決器的程序和仿真資料免費(fèi)下載
- 2.96 MB | 44次下載 | 免費(fèi)
- 5美的電磁爐維修手冊(cè)大全
- 1.56 MB | 24次下載 | 5 積分
- 6如何正確測(cè)試電源的紋波
- 0.36 MB | 18次下載 | 免費(fèi)
- 7感應(yīng)筆電路圖
- 0.06 MB | 10次下載 | 免費(fèi)
- 8萬用表UT58A原理圖
- 0.09 MB | 9次下載 | 5 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論