 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
2:激光雷達(dá)的分類
根據(jù)掃描機(jī)構(gòu)的不同,激光測(cè)距雷達(dá)有2D和3D兩種。它們大部分都是靠一個(gè)旋轉(zhuǎn)的反射鏡將激光發(fā)射出去并通過(guò)測(cè)量發(fā)射光和從物體表面反射光之間的時(shí)間差來(lái)測(cè)距。3D激光測(cè)距雷達(dá)的反射鏡還附加一定范圍內(nèi)俯仰以達(dá)到面掃描的效果。它們都是直接測(cè)距方法。同3D激光測(cè)距雷達(dá)相比,2D激光測(cè)距雷達(dá)只在一個(gè)平面上掃描,結(jié)構(gòu)簡(jiǎn)單,測(cè)距速度快、系統(tǒng)穩(wěn)定可靠。目前2D激光測(cè)距雷達(dá)主要在室內(nèi)的移動(dòng)機(jī)器人上應(yīng)用較多,因?yàn)樵谑覂?nèi)的結(jié)構(gòu)化環(huán)境下,地面平坦,所有障礙物又都垂直于地面,因此機(jī)器人只要能在平行于地面的平面上獲取環(huán)境信息便己經(jīng)足夠?qū)Ш降男枰:芏嗍覂?nèi)移動(dòng)機(jī)器人的應(yīng)用,如環(huán)境的地圖生成,機(jī)器人的自定位,避障等等的研究都是基于2D激光測(cè)距雷達(dá)的。但是,將2D激光測(cè)距雷達(dá)用于越野環(huán)境下的障礙物檢測(cè)有相當(dāng)?shù)碾y度。由于越野地形復(fù)雜,高低不平,由此會(huì)引起車體行駛時(shí)的劇烈顛簸。而2D激光測(cè)距雷達(dá)只能是單線掃描,因此不可避免的會(huì)引起比較嚴(yán)重的障礙物的漏檢和虛報(bào)現(xiàn)象。
3:激光雷達(dá)測(cè)量時(shí)間的技術(shù)
激光測(cè)距雷達(dá)測(cè)量時(shí)間差有三種不同的技術(shù):
(l)脈沖檢測(cè)法:直接測(cè)量反射脈沖與發(fā)射脈沖之間的時(shí)間差;
(2)相干檢測(cè)法:通過(guò)測(cè)量調(diào)頻連續(xù)波的發(fā)射光束和反射光束之間的差頻而測(cè)量時(shí)間差;
(3)相移檢測(cè)法:通過(guò)測(cè)量調(diào)幅連續(xù)波,的發(fā)射光束和反射光束之間的相位差而測(cè)量時(shí)間差。由于相位差的2兀周期性,因此這一方法測(cè)得的只是相對(duì)距離,而非絕對(duì)距離,
4:激光雷達(dá)在ALV中的用途
在陸地移動(dòng)機(jī)器人的導(dǎo)航中,3D激光測(cè)距雷達(dá)應(yīng)用得比較多。在移動(dòng)機(jī)器人中中主要應(yīng)用在以下三個(gè)方面:
(1)路標(biāo)檢測(cè)及地圖匹配
(2)越野行駛時(shí)建立地形圖
(3)障礙物檢測(cè)
5:舉例LMS291-s05型號(hào)的激光雷達(dá)的特點(diǎn)和參數(shù)
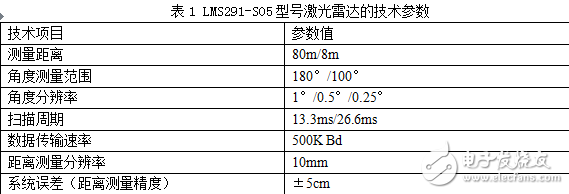
以LMS291-S05型號(hào)激光雷達(dá)為例進(jìn)行分析,該型號(hào)是一種二維的激光雷達(dá),只掃描一個(gè)平面的數(shù)據(jù),其特點(diǎn)是:(1) 感知距離遠(yuǎn),最大可達(dá)80米;覆蓋角度范圍大,最大可達(dá)180度;(2) 距離和角度測(cè)量精度高,分別可達(dá)5厘米和0.1度;(3) 掃描時(shí)間短,約為26.6毫秒,可以獲得高車速情況下的實(shí)時(shí)測(cè)量;(4) 具有霧校正功能,對(duì)環(huán)境光線變化不敏感,適用于室外環(huán)境。LMS291-S05型號(hào)激光雷達(dá)詳細(xì)的技術(shù)參數(shù)請(qǐng)見表1。其中比較重要的參數(shù)包括角度測(cè)量范圍和角度分辨率、掃描周期、系統(tǒng)誤差。角度測(cè)量范圍和角度分辨率決定了激光雷達(dá)得到的數(shù)據(jù)量;掃描周期是對(duì)定位算法實(shí)時(shí)性的評(píng)價(jià)標(biāo)準(zhǔn);系統(tǒng)誤差對(duì)整個(gè)定位過(guò)程的精度有很大影響。
- 帶有運(yùn)動(dòng)跟蹤和激光雷達(dá)的機(jī)器人汽車路徑規(guī)劃
- 【虹科】HKCubeRange1激光雷達(dá)產(chǎn)品規(guī)格_中文簡(jiǎn)體
- 【虹科】HKCube1激光雷達(dá)產(chǎn)品規(guī)格_中文簡(jiǎn)體
- 【虹科】HKCube激光雷達(dá)介紹_中文簡(jiǎn)體
- 激光雷達(dá)技術(shù)及其發(fā)展動(dòng)向.pdf 145次下載
- 【虹科】MEMS激光雷達(dá)技術(shù)與應(yīng)用
- 基于單線激光雷達(dá)的數(shù)字重構(gòu)系統(tǒng)綜述 75次下載
- 基于拉曼激光雷達(dá)的大氣水汽監(jiān)測(cè)系統(tǒng) 27次下載
- PLC技術(shù)在移動(dòng)機(jī)器人中的應(yīng)用研究 19次下載
- 小米2D激光雷達(dá)拆解資源下載 0次下載
- 軍用激光雷達(dá)相關(guān)技術(shù)的介紹及其發(fā)展趨勢(shì)解析 24次下載
- 激光雷達(dá)技術(shù)在汽車領(lǐng)域的應(yīng)用 50次下載
- 激光雷達(dá)的優(yōu)劣勢(shì)與無(wú)人駕駛汽車和家用機(jī)器人上的激光雷達(dá)的區(qū)別介紹 56次下載
- 激光雷達(dá)的含義及其優(yōu)點(diǎn)和分類的介紹 43次下載
- 激光雷達(dá)的定義及工作方式的介紹 40次下載
- 激光雷達(dá)的工作原理和分類 745次閱讀
- 步進(jìn)電機(jī)在工業(yè)機(jī)器人中的應(yīng)用 845次閱讀
- 闡述基于激光三角測(cè)距法的激光雷達(dá)原理 1534次閱讀
- 什么是激光雷達(dá)?激光雷達(dá)的構(gòu)成與分類 1w次閱讀
- 晶振在激光雷達(dá)系統(tǒng)中的作用 689次閱讀
- TOF激光雷達(dá)的類別 1708次閱讀
- 激光雷達(dá)傳感技術(shù)的定義與分類 2801次閱讀
- 激光雷達(dá)的7大分類 8247次閱讀
- 關(guān)于FMCW激光雷達(dá)核心技術(shù)及量產(chǎn)難點(diǎn) 1w次閱讀
- 什么才是衡量激光雷達(dá)實(shí)用和可靠的指標(biāo) 3170次閱讀
- 介紹激光雷達(dá)和相機(jī)在無(wú)人車感知中的應(yīng)用 7143次閱讀
- 簡(jiǎn)單介紹自動(dòng)駕駛中的車載激光雷達(dá) 1.3w次閱讀
- 論激光雷達(dá)在汽車和工業(yè)領(lǐng)域中的應(yīng)用 5050次閱讀
- 激光雷達(dá)技術(shù) 1.1w次閱讀
- 激光雷達(dá)除了無(wú)人車領(lǐng)域,還能怎么用? 1473次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 2開關(guān)電源基礎(chǔ)知識(shí)
- 5.73 MB | 11次下載 | 免費(fèi)
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設(shè)計(jì)
- 0.60 MB | 3次下載 | 免費(fèi)
- 5DIY動(dòng)手組裝LED電子顯示屏
- 0.98 MB | 3次下載 | 免費(fèi)
- 6基于FPGA的C8051F單片機(jī)開發(fā)板設(shè)計(jì)
- 0.70 MB | 2次下載 | 免費(fèi)
- 751單片機(jī)PM2.5檢測(cè)系統(tǒng)程序
- 0.83 MB | 2次下載 | 免費(fèi)
- 8基于51單片機(jī)的RGB調(diào)色燈程序仿真
- 0.86 MB | 2次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537797次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191186次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論