2017全球無(wú)人駕駛大會(huì)暨展覽會(huì)時(shí)間:2017年6月13-15日 地點(diǎn):北京·國(guó)家會(huì)議中心大會(huì)主題:“無(wú)人駕駛、驅(qū)動(dòng)未來(lái)” 權(quán)威組織機(jī)構(gòu)指導(dǎo)單位:中華人民共和國(guó)工業(yè)和信息化部中國(guó)科學(xué)技術(shù)協(xié)會(huì)主辦單位
2017-02-22 19:57:21
近來(lái)無(wú)人駕駛車(chē)輛引起了廣泛熱議。 業(yè)界正在努力開(kāi)發(fā)這種技術(shù),將其作為提高安全性和節(jié)省費(fèi)用的方法。 這已不再是遙不可及的構(gòu)想,寶馬、奔馳和特斯拉等公司均已發(fā)布或即將發(fā)布可使汽車(chē)自動(dòng)駕駛的車(chē)輛系統(tǒng)。一些
2017-04-28 17:11:01
在自動(dòng)駕駛領(lǐng)域,目前有兩大技術(shù)路徑:一是以特斯拉等汽車(chē)廠商為代表的“輔助駕駛”升級(jí)路線,其探測(cè)技術(shù)基礎(chǔ)是攝像頭(機(jī)器視覺(jué))、毫米波雷達(dá)、超聲雷達(dá);二是以谷歌等互聯(lián)網(wǎng)公司為代表的“無(wú)人駕駛”路線;其
2017-09-28 16:50:52
無(wú)人駕駛分級(jí)無(wú)人駕駛汽車(chē)關(guān)鍵技術(shù)
2021-01-21 07:13:47
`` 本帖最后由 hexiaoyan1111 于 2014-11-11 11:27 編輯
無(wú)人駕駛導(dǎo)航平臺(tái)作者:北京太速科技有限公司發(fā)達(dá)國(guó)家從20世紀(jì)70年代開(kāi)始研究無(wú)人駕駛汽車(chē),目前在可行性
2014-11-11 11:21:30
在通往無(wú)人駕駛的神奇之路上,英特爾勇往直前。在1939年世界博覽會(huì)上,通用汽車(chē)的未來(lái)世界展覽預(yù)示,由嵌入技術(shù)的道路控制汽車(chē)的新時(shí)代終將到來(lái)。早期的無(wú)人駕駛汽車(chē)概念更關(guān)注支持車(chē)輛的基礎(chǔ)設(shè)施,而非車(chē)輛本身。
2020-05-13 06:07:36
最近有很多關(guān)于無(wú)人駕駛的新聞和言論,特別是在亞利桑那州。上周,通用汽車(chē)公司宣布已開(kāi)始在斯科茨的街道上測(cè)試其自動(dòng)車(chē)Chevrolet Bolt,這街離安森美半導(dǎo)體在菲尼克斯的總部以北僅幾英里。谷歌
2018-11-01 09:00:20
無(wú)人駕駛汽車(chē)開(kāi)發(fā)的關(guān)鍵技術(shù)主要有兩個(gè)方面:車(chē)輛定位和車(chē)輛控制技術(shù)。這兩方面相輔相成共同構(gòu)成無(wú)人駕駛汽車(chē)的基礎(chǔ)。
2020-03-18 09:02:01
無(wú)人駕駛汽車(chē)的工作原理是什么?無(wú)人駕駛汽車(chē)包括哪些技術(shù)?
2021-06-28 07:19:59
、車(chē)載網(wǎng)絡(luò)、LED照明、動(dòng)力總成、車(chē)身和主動(dòng)安全方案。觀看此視頻,了解安森美半導(dǎo)體如何幫助汽車(chē)設(shè)計(jì)工程師和制造商解決創(chuàng)建連接的和無(wú)人駕駛汽車(chē)面臨的獨(dú)特挑戰(zhàn)。
2018-10-19 09:08:15
目前無(wú)人駕駛出現(xiàn)了兩種技術(shù)方向,一種是超級(jí)大腦類(lèi)型,即從有人駕駛一步到無(wú)人駕駛的研究方向。另一種則是通過(guò)半自動(dòng)駕駛逐步實(shí)現(xiàn)無(wú)人駕駛技術(shù)的研究路線。ADI公司汽車(chē)電子事業(yè)部大中華區(qū)市場(chǎng)總監(jiān)許智斌先生
2017-02-22 16:07:56
自動(dòng)駕駛還需要較長(zhǎng)的路要走ADAS、自動(dòng)駕駛、無(wú)人駕駛、智能汽車(chē)等詞語(yǔ)風(fēng)靡科技圈,如果哪個(gè)智能硬件團(tuán)隊(duì)或科技公司無(wú)法與這些關(guān)鍵詞建立關(guān)聯(lián),頗有被世界遺棄之感。但是,如果客觀的去分析,真正意義上的自動(dòng)駕駛尚有較長(zhǎng)的路要走。
2020-05-07 06:59:06
員提供了輔助信息。例如,車(chē)道保持輔助和主動(dòng)巡航控制能夠在汽車(chē)偏離車(chē)道等特定情況下對(duì)汽車(chē)進(jìn)行自動(dòng)控制,不過(guò)駕駛員始終能夠根據(jù)實(shí)際情況脫離系統(tǒng)的自動(dòng)操作。無(wú)人駕駛車(chē)輛目前尚處于試驗(yàn)階段,并且有可能需要十幾年
2018-08-30 15:39:10
` 本帖最后由 anyhero 于 2016-6-7 20:50 編輯
各位技術(shù)大咖,我和朋友在上海,去年九三閱兵和朋友一起成立了無(wú)人駕駛研究小組(非營(yíng)利性),希望可以做出一個(gè)借口全部打開(kāi)的可控
2016-06-06 21:17:26
`無(wú)人駕駛系統(tǒng)是一個(gè)龐大而又復(fù)雜的系統(tǒng)工程,從物理結(jié)構(gòu)上看,它分為硬件、操作系統(tǒng)、軟件、外設(shè)等幾個(gè)不同的部分。每一個(gè)部分的細(xì)分和辨別,甚至都是一個(gè)復(fù)雜的生態(tài)系統(tǒng)。硬件是這個(gè)系統(tǒng)工程的基礎(chǔ),任何離開(kāi)
2017-09-30 16:50:53
本文是無(wú)人駕駛技術(shù)系列的第十篇,著重介紹無(wú)人駕駛硬件平臺(tái)設(shè)計(jì)。無(wú)人駕駛硬件系統(tǒng)是多種技術(shù)、多個(gè)模塊的集成,主要包括:傳感器平臺(tái)、計(jì)算平臺(tái)、以及控制平臺(tái)。本文將詳細(xì)介紹這三個(gè)平臺(tái)以及現(xiàn)有的解決方案
2021-09-09 08:16:33
`Labview物理通道問(wèn)題,亟待解決,求大神指導(dǎo)具體步
補(bǔ)充內(nèi)容 (2018-1-9 12:32):
已解決`
2018-01-09 11:16:25
最近一項(xiàng)最新的研究使得GPS能夠精確到厘米的級(jí)別。這項(xiàng)新技術(shù)不只是讓司機(jī)不會(huì)在路上迷失方向,同時(shí)還是無(wú)人駕駛汽車(chē)上路的關(guān)鍵,甚至讓航空旅行變得更加安全。我們中的大多數(shù)人都依賴(lài)于全球定位系統(tǒng)(GPS
2017-10-16 11:04:26
項(xiàng)目名稱(chēng):室內(nèi)無(wú)人駕駛技術(shù)試用計(jì)劃:嵌入式開(kāi)發(fā)
2020-10-29 15:12:05
申請(qǐng)理由: 我們團(tuán)隊(duì)準(zhǔn)備進(jìn)行汽車(chē)的無(wú)人駕駛和語(yǔ)音智能系統(tǒng)開(kāi)發(fā),因?yàn)樾枰M(jìn)行視頻和語(yǔ)音的高速處理,這里我們看中了TI的DSP。無(wú)人駕駛和語(yǔ)音操作是未來(lái)智能化的一個(gè)方向,這里正好正好利用廣州創(chuàng)龍的開(kāi)發(fā)板
2015-09-10 11:08:15
`無(wú)人駕駛汽車(chē),真的要來(lái)了么?物聯(lián)網(wǎng)、互聯(lián)網(wǎng)+、智能硬件,近期熱火朝天,不過(guò)最熱的要數(shù)無(wú)人駕駛技術(shù),多家行業(yè)巨頭紛紛押注,而行業(yè)外部企業(yè)虎視眈眈,競(jìng)爭(zhēng)最火熱的要數(shù)以下幾家: Google無(wú)疑是
2016-06-24 14:28:03
據(jù)相關(guān)網(wǎng)站報(bào)道,相關(guān)媒體的一項(xiàng)新報(bào)告顯示,全球無(wú)人駕駛汽車(chē)保有量到2035年將增長(zhǎng)到2100萬(wàn)輛。 此次更新的數(shù)據(jù)相比之前的評(píng)估大幅增長(zhǎng),預(yù)期銷(xiāo)量的上漲主要緣于無(wú)人駕駛汽車(chē)的研究和開(kāi)發(fā)已經(jīng)吸引
2016-06-13 14:55:19
本文是無(wú)人駕駛技術(shù)系列的第十篇,著重介紹無(wú)人駕駛硬件平臺(tái)設(shè)計(jì)。無(wú)人駕駛硬件系統(tǒng)是多種技術(shù)、多個(gè)模塊的集成,主要包括:傳感器平臺(tái)、計(jì)算平臺(tái)、以及控制平臺(tái)。本文將詳細(xì)介紹這三個(gè)平臺(tái)以及現(xiàn)有的解決方案
2021-09-09 07:37:47
2016亞太智能網(wǎng)聯(lián)汽車(chē)國(guó)際峰會(huì)暨展覽會(huì) 時(shí)間:2016年12月8-9日(周四至周五) 地點(diǎn):上海嘉定 主題:從先進(jìn)駕駛輔助系統(tǒng)到無(wú)人駕駛 峰會(huì)暨展覽介紹:作為新一代自動(dòng)駕駛和信息網(wǎng)
2016-10-27 15:53:48
據(jù)國(guó)外媒體報(bào)道,大數(shù)據(jù)分析師、BigData-Startups.com創(chuàng)始人馬克。馮。里吉門(mén)納姆(Mark van Rijmenam)指出,無(wú)人駕駛汽車(chē)將配置有大量傳感器,每秒鐘可生成1GB的數(shù)據(jù)。
2020-04-29 08:34:54
有許多朋友去買(mǎi)車(chē)時(shí)候發(fā)現(xiàn)要找到合適自己風(fēng)格的汽車(chē)真不是很容易,基于此,模塊化無(wú)人駕駛汽車(chē)就這樣亮相,據(jù)英國(guó)《每日郵報(bào)》報(bào)道稱(chēng),香港公司OSVehicle近日展示全球首款模塊化無(wú)人駕駛汽車(chē)Edit,該
2017-05-23 18:10:29
關(guān)于無(wú)人駕駛硬件平臺(tái)的解決方案,不看肯定后悔
2021-11-03 06:32:54
無(wú)人駕駛可能是這幾年科技圈里最受關(guān)注的概念,除了谷歌、百度、樂(lè)視等互聯(lián)網(wǎng)企業(yè),在今年的北京車(chē)展上,長(zhǎng)安、北汽、日產(chǎn)等傳統(tǒng)車(chē)企也都展出了無(wú)人駕駛概念車(chē),充分展現(xiàn)出了整個(gè)行業(yè)對(duì)于無(wú)人駕駛的熱情
2016-06-21 16:21:14
雙電動(dòng)機(jī)無(wú)人駕駛汽車(chē)電路本文所應(yīng)用到的相關(guān)器件資料: OCP71 OCP76 
2008-09-01 13:41:40
基于光電導(dǎo)航的無(wú)人駕駛智能車(chē)下個(gè)月學(xué)校舉行這個(gè)智能車(chē)比賽,比在相同路段跑的時(shí)間,看到這個(gè)題目,沒(méi)有任何思路。。望高手指教下,原理圖,設(shè)計(jì)思路。。都可以!!謝謝~
2013-04-10 10:19:23
如何實(shí)現(xiàn)無(wú)人駕駛硬件平臺(tái)的設(shè)計(jì)?
2021-11-02 09:29:23
如何構(gòu)建一輛無(wú)人駕駛車(chē)呢?
2021-09-30 07:37:34
無(wú)人駕駛技術(shù)現(xiàn)如今其實(shí)非常成熟了,就以現(xiàn)在的技術(shù)水平看,如果把大城市復(fù)雜的交通狀況變成實(shí)驗(yàn)室特定的格局,場(chǎng)景內(nèi)有制式統(tǒng)一的車(chē)輛以及符合規(guī)矩的行人正常通行,那么不用方向盤(pán),全程自動(dòng)行駛的汽車(chē)當(dāng)下就可以
2017-10-23 17:51:41
無(wú)人駕駛汽車(chē)的話,你上路之后估計(jì)是一直在剎車(chē),因?yàn)?b class="flag-6" style="color: red">很多新手上路根本就不講究交通規(guī)則,左轉(zhuǎn)又轉(zhuǎn)的,馬路上就你一個(gè)人在開(kāi)無(wú)人駕駛汽車(chē)的話,你知道剎車(chē)別人不知道剎車(chē),或者你剎車(chē)是緊急的情況下估計(jì)就很容易出事故了
2015-01-09 10:45:11
機(jī)器人普及亟待解決的10大挑戰(zhàn),你都知道哪些?如何去應(yīng)對(duì)這些挑戰(zhàn)?
2021-06-17 07:37:42
機(jī)器學(xué)習(xí)算法如何用于制造無(wú)人駕駛汽車(chē)
2021-03-18 06:27:18
`就在不久前,著名咨詢(xún)公司羅蘭貝格發(fā)布了《汽車(chē)行業(yè)顛覆性數(shù)據(jù)探測(cè)》第二期報(bào)告,報(bào)告指出,全球汽車(chē)行業(yè)向無(wú)人駕駛出行方向的發(fā)展速度有一定提升。而其中,提升的關(guān)鍵在于,在整體變革進(jìn)程上,各國(guó)均呈現(xiàn)出朝
2017-10-20 15:49:06
感知技術(shù),實(shí)現(xiàn)高精度車(chē)輛探測(cè)識(shí)別、跟蹤、距離和速度估計(jì)、路面分割、車(chē)道線檢測(cè),為自動(dòng)駕駛的智能決策提供依據(jù)。雖然百度無(wú)人駕駛汽車(chē)已經(jīng)完成如此高難度的路測(cè),但是這不是意味著百度無(wú)人駕駛汽車(chē)很快就能進(jìn)入市場(chǎng)。目前,該領(lǐng)域還存在很多空白,如無(wú)人駕駛汽車(chē)行業(yè)的行業(yè)標(biāo)準(zhǔn),無(wú)人駕駛汽車(chē)出現(xiàn)事故由誰(shuí)負(fù)責(zé)等一系列問(wèn)題。
2015-12-12 16:53:14
`早在2015年的時(shí)候,福特CEO就曾經(jīng)揚(yáng)言,五年內(nèi)將有人推出無(wú)人駕駛汽車(chē)。如果連保守的汽車(chē)行業(yè)都認(rèn)為無(wú)人駕駛汽車(chē)能在短時(shí)間內(nèi)上市,那么,我們離ADAS自動(dòng)輔助駕駛、直到完整的自動(dòng)駕駛、甚至無(wú)人駕駛
2017-02-07 14:58:38
前兩天,百度已經(jīng)在北京完成路測(cè),如今國(guó)外又傳來(lái)谷歌無(wú)人駕駛汽車(chē)的消息。12月14日,谷歌在過(guò)去的兩年里,不斷與英國(guó)***進(jìn)行多次會(huì)談,希望能在英國(guó)推廣無(wú)人駕駛汽車(chē)。谷歌認(rèn)為,無(wú)人駕駛汽車(chē)技術(shù)可以讓
2015-12-14 14:07:13
開(kāi)關(guān)磁阻電機(jī)開(kāi)發(fā)應(yīng)用和亟待解決的問(wèn)題
2017-01-21 12:12:16 0
0 本文主要介紹了特斯拉無(wú)人駕駛安全嗎_特斯拉無(wú)人駕駛事故多嗎?根據(jù)當(dāng)前的信息和媒體報(bào)道,在嚴(yán)格遵守官方指引的情況下,特斯拉無(wú)人駕駛是安全的;但是,指引很容易被忽略。而激光雷達(dá)(LiDAR)被認(rèn)為是最好的可應(yīng)用于自動(dòng)駕駛的工具,它可以發(fā)出激光束,準(zhǔn)確感知周?chē)矬w及距離。
2018-01-04 16:41:04 3780
3780 創(chuàng)始核心成員李力耘博士聊了聊,李力耘表示目前無(wú)人駕駛技術(shù)上最亟待解決的技術(shù)是傳感器的能力跟它的價(jià)值的平衡、無(wú)人駕駛的規(guī)劃控制兩大問(wèn)題。
2018-07-09 18:10:00613 說(shuō)起無(wú)人駕駛,很多人會(huì)將諸如激光雷達(dá)的硬件成本、控制芯片的運(yùn)算能力、極端氣候下的道路環(huán)境識(shí)別能力以及影響機(jī)器學(xué)習(xí)的人工智能技術(shù)等視為制約無(wú)人駕駛技術(shù)商業(yè)化部署的瓶頸,但筆者覺(jué)得,這些問(wèn)題隨著技術(shù)
2019-10-13 16:46:00955 無(wú)人駕駛時(shí)代正在來(lái)臨。在我國(guó)交通強(qiáng)國(guó)建設(shè)綱要等政策的支持和推動(dòng)下,無(wú)人駕駛汽車(chē)作為智慧交通的核心之一受到了高度重視。從全國(guó)首張無(wú)人駕駛汽車(chē)試運(yùn)營(yíng)牌照的發(fā)布,到首臺(tái)5G網(wǎng)絡(luò)智能無(wú)人駕駛礦車(chē)的亮相,各類(lèi)
2019-10-30 16:26:471026 目前無(wú)人駕駛的發(fā)展仍然面臨行駛方式待檢驗(yàn)、無(wú)人駕駛如何年檢、交通違章如何處理等諸多問(wèn)題,因此需要更多SLAM前沿技術(shù)做支持,在降低SLAM算法難度的同時(shí),加大對(duì)新型傳感器的研發(fā)力度,讓用戶(hù)在AR/VR、機(jī)器人、無(wú)人機(jī)、無(wú)人駕駛領(lǐng)域體驗(yàn)感更強(qiáng)。
2020-03-24 10:15:031155 本文主要闡述了無(wú)人駕駛汽車(chē)的功能及無(wú)人駕駛汽車(chē)構(gòu)造。
2020-09-01 15:47:299355 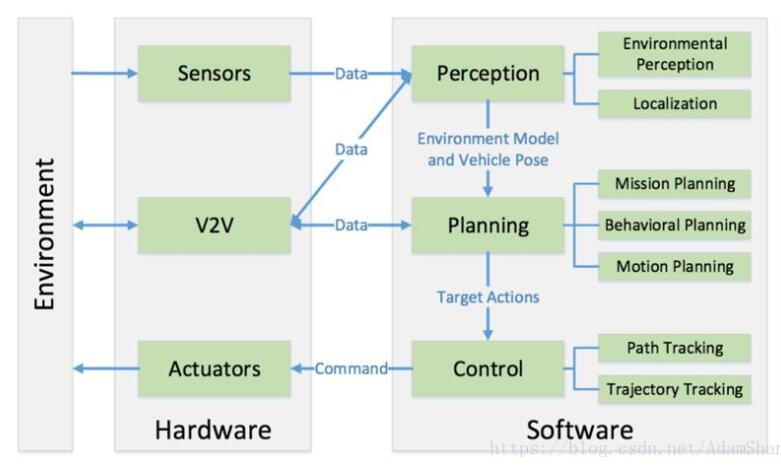
本文首先介紹了無(wú)人駕駛汽車(chē)的價(jià)格,其次闡述了無(wú)人駕駛汽車(chē)的工作原理,最后介紹了無(wú)人駕駛汽車(chē)的特點(diǎn)。
2020-09-07 15:34:404579 無(wú)人駕駛汽車(chē),又稱(chēng)自動(dòng)駕駛汽車(chē)或輪式移動(dòng)機(jī)器人,是一種運(yùn)輸動(dòng)力的無(wú)人地面載具。我們理想的無(wú)人駕駛汽車(chē)是無(wú)需人類(lèi)操作即能從地點(diǎn)A行駛到地點(diǎn)B,不管途中環(huán)境多復(fù)雜天氣多惡劣都由機(jī)器自己完成。無(wú)人駕駛汽車(chē)的核心在于無(wú)人駕駛技術(shù),如果說(shuō)汽車(chē)工業(yè)是制造業(yè)的皇冠,那么無(wú)人駕駛技術(shù)就是皇冠上的明珠。
2021-01-31 07:39:4655 無(wú)人車(chē)?yán)塾?jì)落地20000臺(tái)。隨著低速自動(dòng)駕駛市場(chǎng)需求日益擴(kuò)大,仍有很多技術(shù)問(wèn)題亟待解決。由于低速”環(huán)境下的道路,往往人車(chē)混行、道路障礙和可變因素繁多,因此低速無(wú)人
2023-04-25 14:58:08466 
 電子發(fā)燒友App
電子發(fā)燒友App





























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論