電機(jī)控制和驅(qū)動(dòng)器在許多應(yīng)用中都是基礎(chǔ),因?yàn)樗鼈兛梢?b class="flag-6" style="color: red">實(shí)現(xiàn)高精度,從而轉(zhuǎn)化為更低的成本和更高的效率。電機(jī)控制電路執(zhí)行的重要功能是確保轉(zhuǎn)子在不同的運(yùn)行和負(fù)載條件下獲得與繞組有關(guān)的精確位置,從而以足夠的準(zhǔn)確度確定其位置。
2022-07-27 11:44:40 2381
2381 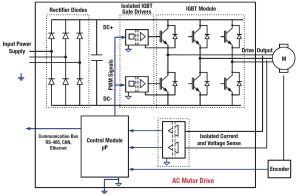
導(dǎo)讀:傳統(tǒng)的直接轉(zhuǎn)矩控制方法6扇區(qū)電壓矢量選擇會(huì)導(dǎo)致磁鏈控制不對(duì)稱、轉(zhuǎn)矩脈動(dòng)大等問題,本期介紹一種把扇區(qū)細(xì)分為12扇區(qū)的新型三相異步電機(jī)直接轉(zhuǎn)矩控制方法,仿真結(jié)果證明磁鏈軌跡、轉(zhuǎn)速及轉(zhuǎn)矩脈動(dòng)明顯變小,異步電機(jī)三相定子電流波形更加圓滑,更加接近于正弦波形。
2023-10-18 15:13:38454 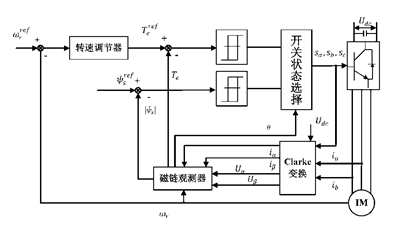
?
還有轉(zhuǎn)速動(dòng)態(tài)控制精度是多少?見圖二,按道理來說,電機(jī)的實(shí)際輸出轉(zhuǎn)速和給定轉(zhuǎn)速應(yīng)該一致,我給定的是1000RPM,但是實(shí)際輸出確是1001.2RPM。實(shí)際輸出會(huì)有一定的波動(dòng),請(qǐng)問有什么參數(shù)可以參照量化這個(gè)轉(zhuǎn)速波動(dòng)?與S120伺服系統(tǒng)搭配使用。
2023-11-08 06:25:07
1. 電機(jī)在加速時(shí)怎么減小電機(jī)轉(zhuǎn)矩的波動(dòng)?2. 電機(jī)在速度控制時(shí)怎么保證轉(zhuǎn)矩恒定?
2018-08-28 11:23:09
步進(jìn)電機(jī) vs 伺服電機(jī):1、控制精度:步進(jìn)電機(jī)的控制精度是由步距角決定的,且每個(gè)電機(jī)的步距角是確定的;伺服電機(jī)步距角由編碼器決定,所以控制精度非常高。【注】步距角:輸入一個(gè)脈沖能轉(zhuǎn)動(dòng)的角度。二相
2021-06-28 07:57:52
電機(jī)功率和轉(zhuǎn)矩、轉(zhuǎn)速之間的關(guān)系功率=力*速度P=F*V--------------------------------------------------公式--1轉(zhuǎn)矩(T)=扭力(F)*作用半徑
2021-08-27 06:38:19
新手一名,我想用Labview 做一個(gè)電機(jī)(電動(dòng)汽車用的電機(jī),帶有逆變器)控制界面,用于測(cè)試電機(jī)的轉(zhuǎn)速轉(zhuǎn)矩特性,測(cè)試平臺(tái)已有。求高手指導(dǎo)?
2012-07-16 20:54:07
電機(jī)額定轉(zhuǎn)速與額定轉(zhuǎn)矩怎么計(jì)算?電機(jī)額定轉(zhuǎn)矩作用是什么?
2021-10-08 06:55:58
測(cè)試法在能量轉(zhuǎn)換轉(zhuǎn)矩測(cè)試法中,測(cè)量電機(jī)的電能參數(shù)的方法應(yīng)用較多,近年來,利用電機(jī)電參數(shù)測(cè)瞬態(tài)轉(zhuǎn)矩或轉(zhuǎn)矩自動(dòng)控制等方面有新發(fā)展。下面介紹測(cè)試異步電機(jī)轉(zhuǎn)矩與異步電動(dòng)機(jī)轉(zhuǎn)矩 轉(zhuǎn)速曲線的瞬態(tài)測(cè)試方法。1.在電源
2017-12-20 17:34:04
,近年來,利用電機(jī)電參數(shù)測(cè)瞬態(tài)轉(zhuǎn)矩或轉(zhuǎn)矩自動(dòng)控制等方面有新發(fā)展。下面介紹測(cè)試異步電機(jī)轉(zhuǎn)矩與異步電動(dòng)機(jī)轉(zhuǎn)矩 轉(zhuǎn)速曲線的瞬態(tài)測(cè)試方法。1.在電源電壓及頻率恒定條件下測(cè)試異步電機(jī)轉(zhuǎn)矩的方法由電機(jī)學(xué)知,異步電動(dòng)機(jī)
2018-01-19 11:06:12
最初對(duì)PCB確立±10%的控制精度要求是由電路中800Mz頻率信號(hào)的Direc Rambus型的 DRAM模塊(RIMM)應(yīng)用所提出的,這是為了保證計(jì)算機(jī)主機(jī)和交換機(jī)的內(nèi)部電路實(shí)現(xiàn)更高速的動(dòng)作。不僅
2023-09-21 06:14:35
我的畢業(yè)設(shè)計(jì)要求用labview控制電力測(cè)功機(jī),應(yīng)該是采用 LabVIEW 軟件編寫控制程序,實(shí)現(xiàn)軟件與變頻器的通訊聯(lián)系,對(duì)測(cè)功機(jī)系統(tǒng)進(jìn)行實(shí)時(shí)控制。通過對(duì)電機(jī)轉(zhuǎn)矩和轉(zhuǎn)速的控制,利用獲得的測(cè)試數(shù)據(jù),繪制電機(jī)的轉(zhuǎn)矩、轉(zhuǎn)速、負(fù)載圖形。求各位高手幫忙做一下,實(shí)在是做不來
2012-03-31 15:09:46
或負(fù)載過大易出現(xiàn)丟步或堵轉(zhuǎn)的現(xiàn)象,停止時(shí)轉(zhuǎn)速過高易出現(xiàn)過沖的現(xiàn)象,所以為保證其控制精度,應(yīng)處理好升、降速問題。交流伺服驅(qū)動(dòng)系統(tǒng)為閉環(huán)控制,驅(qū)動(dòng)器可直接對(duì)電機(jī)編碼器反饋信號(hào)進(jìn)行采樣,內(nèi)部構(gòu)成位置環(huán)和速度
2016-08-19 22:01:04
)*T+Vm/Ke 從形式看是一元一次方程,y=ax+b 有刷直流電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速特性及轉(zhuǎn)矩-電流特性 從轉(zhuǎn)矩-轉(zhuǎn)速關(guān)系中看, 繞線的電阻與斜率有關(guān),改變電阻就得到不同的斜率,這就有了,串電阻以實(shí)現(xiàn)
2023-03-17 14:06:26
神經(jīng)網(wǎng)絡(luò)(RBFNN)算法結(jié)合,實(shí)現(xiàn)了對(duì)無(wú)數(shù)直流電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩的控制。研究所提出的改進(jìn)的無(wú)橋單端初級(jí)電感變換器,可用于調(diào)節(jié)比例積分微分(PID)控制器的參數(shù),從而提高無(wú)刷直流電機(jī)轉(zhuǎn)矩控制中轉(zhuǎn)速閉環(huán)(PID
2023-03-23 15:11:25
電壓,調(diào)節(jié)轉(zhuǎn)矩) 28:正負(fù)8V模擬輸入,轉(zhuǎn)矩控制 2:正負(fù)10V模擬輸入,轉(zhuǎn)速控制(測(cè)試時(shí),沒有連接,使用PC08設(shè)定值,調(diào)節(jié)轉(zhuǎn)矩)43:速度選擇(SP3)2. 配置2.1. 模式設(shè)置電機(jī)模
2021-06-28 09:20:10
兩臺(tái)變頻器控制對(duì)拖電機(jī)運(yùn)行,分別進(jìn)行速度控制和轉(zhuǎn)矩控制,請(qǐng)教怎么實(shí)現(xiàn)加載的過程?這個(gè)過程的原理是什么?我看到有的帖說先開啟速度后開啟轉(zhuǎn)矩,或者先開轉(zhuǎn)矩后加速,還有脈動(dòng)測(cè)試加載?我想請(qǐng)教比較全面詳細(xì)
2024-01-09 07:19:43
,能將輸入的電壓信號(hào)轉(zhuǎn)換為電機(jī)軸上的機(jī)械輸出量,拖動(dòng)被控制元件,從而達(dá)到控制目的。一般地,伺服電機(jī)要求電機(jī)的轉(zhuǎn)速要受所加電壓信號(hào)的控制;轉(zhuǎn)速能夠隨著所加電壓信號(hào)的變化而連續(xù)變化;轉(zhuǎn)矩能通過控制器輸出
2019-06-12 00:25:30
,可檢測(cè)出機(jī)械的共振點(diǎn),便于系統(tǒng)調(diào)整。(2)控制精度高。交流伺服電機(jī)的控制精度由電機(jī)軸后端的旋轉(zhuǎn)編碼器保證。例如松下全數(shù)字式交流伺服電機(jī),對(duì)于帶17位編碼器的電機(jī)而言,驅(qū)動(dòng)器每接收 伺服電機(jī)控制淺析個(gè)
2018-10-12 09:54:20
的響應(yīng),它不但具備控制精度高、控制速度快、自帶PID調(diào)節(jié)功能等特點(diǎn),還可模擬被試電機(jī)負(fù)載的連續(xù)工況變化的情況。在轉(zhuǎn)速或轉(zhuǎn)矩不是特別高或特別低的情況下,都推薦用伺服電機(jī)作為測(cè)試負(fù)載。伺服電機(jī)作為對(duì)拖負(fù)載
2023-03-06 17:24:05
為開環(huán),啟動(dòng)頻率過高或負(fù)載過大易出現(xiàn)丟步或堵轉(zhuǎn)的現(xiàn)象,停止時(shí)轉(zhuǎn)速過高易出現(xiàn)過沖的現(xiàn)象,所以為保證其控制精度,應(yīng)處理好升、降速問題。交流伺服系統(tǒng)為閉環(huán)控制,驅(qū)動(dòng)器可直接對(duì)電機(jī)編碼器反饋信號(hào)進(jìn)行采樣,內(nèi)部構(gòu)成
2018-09-04 10:08:37
輸出轉(zhuǎn)矩電流,控制交流伺服的運(yùn)行,位置控制精度由光電編碼器每轉(zhuǎn)產(chǎn)生的脈沖數(shù)控制,有絕對(duì)與增量?jī)煞N,增量的易于掌握,平均壽命長(zhǎng),分辨率高,但斷電后無(wú)保持。2、速 度 控 制 模 式AC伺服馬達(dá)與其它一般
2018-10-11 10:29:54
現(xiàn)在的設(shè)備是用ARM做處理器,用一個(gè)自整定PID算法來實(shí)現(xiàn)對(duì)轉(zhuǎn)矩轉(zhuǎn)速的控制,但是反應(yīng)速度很慢,從2500轉(zhuǎn)調(diào)到2000轉(zhuǎn),穩(wěn)定時(shí)間要2秒左右。一方面我正在對(duì)PID的參數(shù)進(jìn)行進(jìn)一步整定(不過
2015-03-26 16:43:02
如此高的精確度變得越來越困難。TI 適用于高電流應(yīng)用的電池測(cè)試儀參考設(shè)計(jì)利用恒定電流(CC)和恒定電壓(CV)校準(zhǔn)環(huán)路實(shí)現(xiàn)0.01%滿量程充電和放電電流控制精度。它支持高達(dá)50A的充電和放電速率,并
2021-07-25 08:00:00
2,4,6),所以一般不適和通過改變?cè)撝祦碚{(diào)整電機(jī)的速度。另外,頻率能夠在電機(jī)的外面調(diào)節(jié)后再供給電機(jī),這樣電機(jī)的旋轉(zhuǎn)速度就可以被自由的控制。因此,以控制頻率為目的的變頻器,是做為電機(jī)調(diào)速設(shè)備的優(yōu)選設(shè)備。n
2018-10-11 10:58:46
我查閱了部分變頻器廠商的說明書,在閉環(huán)編碼器反饋矢量控制時(shí)速度控制精度在0.02%,我想著能夠做出這么高的精度嗎?0.02%這么高的精度,以50HZ兩級(jí)對(duì)電機(jī)為例,同步轉(zhuǎn)速1500,如果是在閉環(huán)控制
2024-02-28 12:16:54
本帖最后由 gk320830 于 2015-3-9 06:36 編輯
可逆直流調(diào)速器在異步電機(jī)轉(zhuǎn)矩-轉(zhuǎn)速曲線測(cè)試中的應(yīng)用
2012-07-31 22:05:20
如何實(shí)現(xiàn)PID控制電機(jī)轉(zhuǎn)速?
2021-10-29 06:09:57
如何利用PWM實(shí)現(xiàn)對(duì)LED燈亮度的控制/對(duì)電機(jī)轉(zhuǎn)速的控制?
2022-01-21 07:54:48
如何用Arduino開發(fā)版實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)速控制和方向控制?
2021-10-15 06:49:05
查找了好多文獻(xiàn),發(fā)現(xiàn)都是對(duì)無(wú)刷直流電機(jī)進(jìn)行轉(zhuǎn)矩控制,我現(xiàn)在想要對(duì)有刷直流電機(jī)進(jìn)行轉(zhuǎn)矩控制,比如根據(jù)不同負(fù)載的大小輸出不同大小的轉(zhuǎn)矩,可以實(shí)現(xiàn)嗎?應(yīng)該怎樣解決?對(duì)轉(zhuǎn)矩進(jìn)行控制與有刷和無(wú)刷有關(guān)嗎?跪求看到帖子的大神解救我這個(gè)小白!!!
2019-08-06 12:19:36
如何通過脈沖調(diào)制PWM來控制電機(jī)的電壓從而實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制?
2021-10-19 06:47:40
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng)
2016-01-16 22:05:55
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng):SVC/0.5Hz/150%轉(zhuǎn)矩`
2016-05-30 17:12:11
怎么才能實(shí)現(xiàn)高精度的步進(jìn)電機(jī)位置控制
2023-10-13 07:40:50
鏈空間位置計(jì)算精度要求很高,因而系統(tǒng)構(gòu)成比較復(fù)雜,要實(shí)現(xiàn)有效的直接轉(zhuǎn)矩控制,高性能的單片機(jī)是必不可少的。德州儀器的TMS320F240數(shù)字信號(hào)處理單片機(jī)專門針對(duì)電機(jī)控制系統(tǒng)設(shè)計(jì),本文介紹它在直接轉(zhuǎn)矩
2020-09-24 13:57:39
?轉(zhuǎn)矩滯環(huán)比較模塊坐標(biāo)變換模塊電壓矢量選擇模塊輸出結(jié)果轉(zhuǎn)速?磁鏈轉(zhuǎn)矩結(jié)論異步電機(jī)直接轉(zhuǎn)矩控制(Asynchronous DTC)完整仿真框圖異步電機(jī)模塊磁鏈計(jì)算模塊內(nèi)部結(jié)構(gòu)...
2021-09-06 06:16:21
。間接磁場(chǎng)定向控制通過磁場(chǎng)定向和坐標(biāo)變換,實(shí)現(xiàn)電機(jī)轉(zhuǎn)矩與磁鏈的解耦,對(duì)電機(jī)的磁鏈與轉(zhuǎn)矩進(jìn)行單獨(dú)調(diào)節(jié)控制,獲得類似直流調(diào)速系統(tǒng)的優(yōu)異性能,使異步電機(jī)具備較快的動(dòng)態(tài)響應(yīng)特性與較高的控制精度;弱磁控制是在異步電機(jī)...
2021-09-06 06:22:29
當(dāng)電機(jī)的旋轉(zhuǎn)速度改變時(shí),其輸出轉(zhuǎn)矩會(huì)怎樣? 變頻器驅(qū)動(dòng)時(shí)的起動(dòng)轉(zhuǎn)矩和最大轉(zhuǎn)矩要小于直接用工頻電源驅(qū)動(dòng)時(shí)的起動(dòng)轉(zhuǎn)矩和最大轉(zhuǎn)矩。 我 們經(jīng)常聽到下面的說法:“電機(jī)在工頻電源供電時(shí),電機(jī)的起動(dòng)和加
2016-01-29 10:09:24
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng)
2015-12-01 23:59:53
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng)
2015-08-27 10:57:45
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成角位移或線位移的一種器件。在不超載情況下,步進(jìn)電機(jī)的轉(zhuǎn)速和運(yùn)動(dòng)距離取決于控制電脈沖的頻率和數(shù)量。其控制精度主要由兩方面決定:1、步進(jìn)電機(jī)的每步精度,以2相混合式步進(jìn)
2018-10-25 10:08:58
直流電機(jī)分為哪幾種?什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)可以實(shí)現(xiàn)電機(jī)轉(zhuǎn)速和位置的精確控制嗎?
2021-09-14 06:10:07
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成角位移或線位移的一種器件。在不超載情況下,步進(jìn)電機(jī)的轉(zhuǎn)速和運(yùn)動(dòng)距離取決于控制電脈沖的頻率和數(shù)量。其控制精度主要由兩方面決定:1、步進(jìn)電機(jī)的每步精度,以2相混合式步進(jìn)
2021-09-16 06:56:37
步進(jìn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩是什么關(guān)系?轉(zhuǎn)速高低對(duì)轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
永磁電機(jī)直接轉(zhuǎn)矩的詳細(xì)原理可以自行理解,不懂可以參考其他文章或者聯(lián)系我。目錄永磁同步電機(jī)直接轉(zhuǎn)矩控制(PMSM-DTC)simulink仿真整體框圖永磁同步電機(jī)電機(jī)模塊磁鏈和轉(zhuǎn)矩滯環(huán)比較模塊轉(zhuǎn)速環(huán)
2021-08-27 07:41:22
這是我做永磁同步電機(jī)直接轉(zhuǎn)矩控制的simulink仿真,大伙看看我的轉(zhuǎn)速為什么不能和給定的值一樣,而是呈現(xiàn)正弦式的波形。還有轉(zhuǎn)矩也是波動(dòng)的厲害,剛開始覺得是pid的問題,但是pid調(diào)節(jié)了很久波形還是不對(duì),麻煩大家看看是什么問題。
2018-04-08 14:07:34
型解耦控制方案不能完全解耦,但仍是一種行之有效的控制方法,只要采取較好的處理方式,也能得到高精度的轉(zhuǎn)矩控制。因此,工程上使用電流型解耦控制方案的較多。然而,電流型解耦控制只能實(shí)現(xiàn)電動(dòng)機(jī)電流和轉(zhuǎn)速的靜態(tài)
2018-10-31 10:45:53
本人需做塊直流電機(jī)驅(qū)動(dòng)器。但原來的板子對(duì)電機(jī)的轉(zhuǎn)速控制精度不夠,導(dǎo)致很多電機(jī)因轉(zhuǎn)速超范圍不合格。哪位精通于此的大神能幫忙?萬(wàn)謝
2016-10-08 10:48:14
電動(dòng)機(jī)轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系是怎么樣的呢?在了解之前,首先我們需要了解什么是電動(dòng)機(jī)輸出額定轉(zhuǎn)速和電機(jī)輸出扭矩,這兩者彼此之間息息相關(guān)。額定轉(zhuǎn)速是指在額定功率下電機(jī)的轉(zhuǎn)速。也即滿載時(shí)的電機(jī)轉(zhuǎn)速,故又叫做滿載
2021-06-29 13:53:06
的前提下,通過控制電機(jī)的瞬時(shí)電壓輸入來控制電機(jī)定子磁鏈的瞬時(shí)旋轉(zhuǎn)速度,來改變它對(duì)轉(zhuǎn)子的瞬時(shí)轉(zhuǎn)差率,達(dá)到直接控制電機(jī)輸出的目的。 在直接轉(zhuǎn)矩控制中,電機(jī)定子磁鏈的幅值通過上述電壓的矢量控制而保持為額定值
2016-01-20 10:37:18
不足的技術(shù) 使用"矢量控制",可以使電機(jī)在低速,如(無(wú)速度傳感器時(shí))1Hz(對(duì)4極電機(jī),其轉(zhuǎn)速大約為30r/min)時(shí)的輸出轉(zhuǎn)矩可以達(dá)到電機(jī)在50Hz供電輸出的轉(zhuǎn)矩(最大約為額定
2016-01-29 10:05:03
四軸飛行器的電調(diào)PWM控制精度能達(dá)到多少?四軸調(diào)試碰到瓶頸了。。。請(qǐng)問把PWM的細(xì)分精度提上去會(huì)不會(huì)改善控制效果?
2019-03-29 04:18:25
請(qǐng)問如何實(shí)現(xiàn)PMSM的轉(zhuǎn)矩控制呢,目前我使用的片子是28035,用這個(gè)片子做伺服驅(qū)動(dòng)器,請(qǐng)問有沒有什么庫(kù)函數(shù)、代碼或者算法來實(shí)現(xiàn)對(duì)電機(jī)的輸出轉(zhuǎn)矩進(jìn)行控制呢,謝謝
2018-12-20 14:08:22
明書上說采用這些信號(hào)輸入時(shí)和輸出轉(zhuǎn)速均成正比關(guān)系(每種輸入信號(hào)有一個(gè)轉(zhuǎn)速公式),請(qǐng)問這種驅(qū)動(dòng)器的控制精度如何?誤差大嗎?是否當(dāng)輸入每次都一樣時(shí)輸出轉(zhuǎn)速也一樣,比如第一次采用200赫茲的脈沖信號(hào)輸入,按照
2013-08-22 15:51:03
如下:其中:F 為電機(jī)輸出合力,單位為 N(牛);r 為力臂,單位為 m(米);N為電機(jī)轉(zhuǎn)速,單位為 RPM(轉(zhuǎn) / 分)。我們知道,轉(zhuǎn)矩 T 的定義是力(F)乘以力臂 ? ,即:...
2021-09-15 07:16:13
而致使氣隙磁導(dǎo)發(fā)生了改變,從而不可避免地產(chǎn)生齒槽轉(zhuǎn)矩,導(dǎo)致轉(zhuǎn)矩波動(dòng)、噪聲與振動(dòng),進(jìn)一步地將影響整個(gè)系統(tǒng)的控制精度。很多削弱齒槽轉(zhuǎn)矩的方法被提出,比如斜槽、斜極、優(yōu)化槽開口、優(yōu)化極弧與磁鋼形狀等。其中
2018-10-31 10:53:30
電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速是最重要的兩個(gè)參數(shù),對(duì)它們的測(cè)量必須準(zhǔn)確。根據(jù)用戶提出的測(cè)量航空電機(jī)具體要求,本文分析了轉(zhuǎn)矩和轉(zhuǎn)速的測(cè)量原理,指出了采用應(yīng)變式和光電式傳感器構(gòu)成測(cè)
2009-07-07 08:48:59 39
39 在異步電機(jī)無(wú)速度傳感器直接轉(zhuǎn)矩控制系統(tǒng)中,電機(jī)定子電阻隨著溫度的變化而產(chǎn)生漂移進(jìn)而影響整個(gè)系統(tǒng)的控制精度。利用交互式模型參考自適應(yīng)系統(tǒng)(Mutual MRAS)在對(duì)轉(zhuǎn)速進(jìn)行辨
2009-08-22 12:07:2424 電機(jī)特性常數(shù)測(cè)試系統(tǒng)產(chǎn)品概述:電機(jī)特性常數(shù)測(cè)試系統(tǒng)適用于各種功率電機(jī)測(cè)試,扭矩變化不受轉(zhuǎn)速的影響,因此可以進(jìn)行空載到堵轉(zhuǎn)的全程測(cè)試。實(shí)現(xiàn)電機(jī)的電壓、電流、輸入功率、轉(zhuǎn)速、轉(zhuǎn)矩、輸出功率、效率等進(jìn)行
2023-10-28 13:12:56
直流無(wú)刷電機(jī)測(cè)試系統(tǒng)適用于低到中等功率電機(jī)測(cè)試,扭矩變化不受轉(zhuǎn)速的影響,因此可以進(jìn)行空載到堵轉(zhuǎn)的全程測(cè)試。實(shí)現(xiàn)電機(jī)的電壓、電流、輸入功率、轉(zhuǎn)速、轉(zhuǎn)矩、輸出功率、效率等進(jìn)行高精度測(cè)量。測(cè)試項(xiàng)目:轉(zhuǎn)矩
2023-10-28 13:35:16
針對(duì) 異步電機(jī) 直接轉(zhuǎn)矩控制系統(tǒng)的弱磁控制, 提出了一種新的弱磁控制策略。該策略最基本的思想就是使磁鏈給定值跟隨著轉(zhuǎn)矩誤差的變化。該算法不需要復(fù)雜的電機(jī)參數(shù)而且能夠實(shí)現(xiàn)
2011-06-13 17:16:0838 與傳統(tǒng)的直接轉(zhuǎn)矩控制相比,采用轉(zhuǎn)矩預(yù)測(cè)算法的直接轉(zhuǎn)矩控制能夠有效提高電機(jī)轉(zhuǎn)矩和定子磁鏈的控制精度。現(xiàn)有算法一般在計(jì)算過程專注于轉(zhuǎn)矩增量的控制,而對(duì)定子磁鏈的增量作
2011-09-22 15:28:1149 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成角位移或線位移的一種器件。在不超載情況下,步進(jìn)電機(jī)的轉(zhuǎn)速和運(yùn)動(dòng)距離取決于控制電脈沖的頻率和數(shù)量。
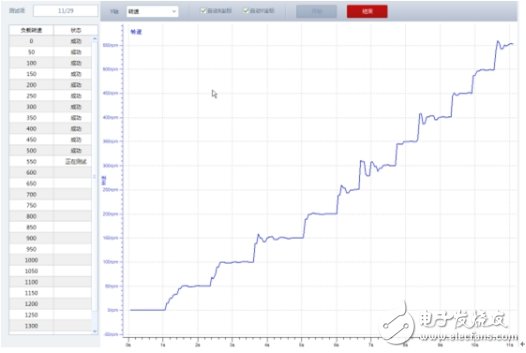
2017-02-10 08:30:117486 正所謂“失之毫厘,謬以千里”,正是道出了精度的重要性。那么在電機(jī)控制中,轉(zhuǎn)速轉(zhuǎn)矩的控制精度測(cè)試是如何實(shí)現(xiàn)的呢?
2017-04-20 09:37:3312 感應(yīng)電機(jī)在作為動(dòng)力牽引時(shí),經(jīng)常會(huì)運(yùn)行于恒功率區(qū),即轉(zhuǎn)速高于基速,此時(shí)由于電源、變流器電壓和電流的限制,多采用弱磁控制,即以降低磁通,滿足提速的日的,但最大轉(zhuǎn)矩也會(huì)隨之降低。 研究感應(yīng)電機(jī)弱磁控制
2017-11-09 15:02:5821 采用永磁同步電機(jī)直接驅(qū)動(dòng)全電飛機(jī)螺旋槳,為了抑制不穩(wěn)定氣流對(duì)輸出轉(zhuǎn)矩影響和提高螺旋槳抗擾動(dòng)能力,對(duì)永磁同步電機(jī)實(shí)現(xiàn)基于自抗擾原理的轉(zhuǎn)速閉環(huán)控制。分析不同飛行狀態(tài)下螺旋槳的轉(zhuǎn)速與轉(zhuǎn)矩需求,建立
2018-01-22 14:59:151 AEKF估計(jì)轉(zhuǎn)速和負(fù)載轉(zhuǎn)矩時(shí),根據(jù)AEKF的要求,將電機(jī)增廣隨機(jī)數(shù)學(xué)模型的輸入噪聲與建模誤差引入的噪聲直接合并,等效為狀態(tài)噪聲;基于變換后的模型,利用狀態(tài)預(yù)測(cè)殘差估計(jì)狀態(tài)噪聲協(xié)方差陣,利用觀測(cè)殘差估計(jì)觀測(cè)噪聲協(xié)方差陣,實(shí)現(xiàn)了噪聲協(xié)方差陣自適應(yīng)變化。實(shí)驗(yàn)結(jié)果表明:所
2018-03-09 13:35:181 本文主要介紹了永磁同步電機(jī)最優(yōu)直接轉(zhuǎn)矩控制原理及實(shí)現(xiàn)方法。
2018-06-05 08:00:0012 對(duì)于電機(jī)控制系統(tǒng),鎖相環(huán)是作為速度環(huán)工作的,還有轉(zhuǎn)矩控制問題尚待解決。
2018-08-31 08:24:007949 最初對(duì)PCB確立±10%的控制精度要求是由電路中800MHz頻率信號(hào)的Direc Rambus 型的DRAM模塊(RIMM)應(yīng)用所提出的,這是為了保證計(jì)算機(jī)主機(jī)和交換機(jī)的內(nèi)部電路實(shí)現(xiàn)更高速的動(dòng)作
2019-05-21 14:47:01819 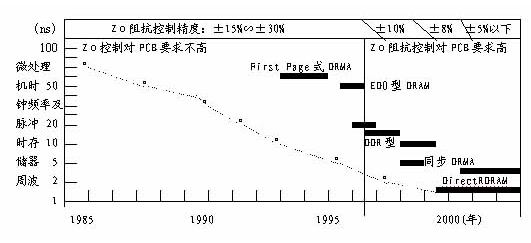
電機(jī)功率、轉(zhuǎn)速、扭矩的關(guān)系。功率的概念是單位時(shí)間所做的功,在一定功率的條件下,轉(zhuǎn)速轉(zhuǎn)速越高,扭矩就越低,反之就越高。
2019-12-30 14:09:1429150 kt,該常數(shù)在大多數(shù)電機(jī)的技術(shù)手冊(cè)中都能找到。獲得需要的轉(zhuǎn)矩m所對(duì)應(yīng)的電流iq也由此計(jì)算得到。但是,輸出轉(zhuǎn)矩和相應(yīng)的電流iq之間的這種恒定關(guān)系的可信度很容易受到各種各樣的實(shí)際因素的負(fù)面影響,這樣的影響很容易產(chǎn)生轉(zhuǎn)矩控制中所不能接受的精度偏差。一些容易影響的實(shí)際因素如下:
2020-04-06 17:28:004297 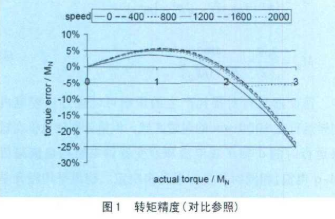
最初對(duì) PCB 確立±10%的控制精度要求是由電路中 800MHz 頻率信號(hào)的 Direc Rambus 型的 DRAM 模塊(RIMM)應(yīng)用所提出的,這是為了保證計(jì)算機(jī)主機(jī)和交換機(jī)的內(nèi)部電路實(shí)現(xiàn)
2023-02-03 14:02:05795 伺服電機(jī)(servomotor)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng)。
2020-12-14 23:26:45817 伺服電機(jī)(servomotor)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng)。
2021-01-20 12:20:1317 電動(dòng)機(jī)轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系是怎么樣的呢?在了解之前,首先我們需要了解什么是電動(dòng)機(jī)輸出額定轉(zhuǎn)速和電機(jī)輸出扭矩,這兩者彼此之間息息相關(guān)。 額定轉(zhuǎn)速是指在額定功率下電機(jī)的轉(zhuǎn)速。也即滿載時(shí)的電機(jī)轉(zhuǎn)速,故又叫
2021-07-13 17:23:0526795 先說結(jié)論,有,而且是大大滴有!相較于其他類型的電機(jī)系統(tǒng),比如變頻電機(jī)步進(jìn)電機(jī)什么的,伺服電機(jī)具有無(wú)可比擬的優(yōu)勢(shì),它控制的精度非常的高。為啥伺服電機(jī)的控制精度高呢?我們簡(jiǎn)單的說一下伺服電機(jī)的工作原理。
2022-08-19 14:09:274156 伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng)。
2022-11-09 17:07:11941 使用電機(jī)速度控制器另外,使用電機(jī)速度控制器也是一種常見的控制電機(jī)轉(zhuǎn)速的方法。電機(jī)速度控制器是一種特殊的電路設(shè)備,可以根據(jù)需要自動(dòng)調(diào)節(jié)電機(jī)的輸入電壓或電機(jī)的機(jī)械負(fù)載,從而實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的精確控制。常見的電機(jī)速度控制器包括直流調(diào)速器、變頻器等。
2023-03-09 18:23:3710658 永磁同步電機(jī)的直接轉(zhuǎn)矩控制(四)一一一基于滑模轉(zhuǎn)速控制器的DTC目錄 永磁同步電機(jī)的直接轉(zhuǎn)矩控制(四)一一一基于滑模轉(zhuǎn)速控制器的DTC 0研究背景 1基于滑模的轉(zhuǎn)速控制器設(shè)計(jì) 2基于滑模的轉(zhuǎn)速控制
2023-03-15 11:29:593 轉(zhuǎn)速環(huán)pi模塊 磁鏈計(jì)算模塊 直接轉(zhuǎn)矩控制矢量選擇模型 仿真結(jié)果 永磁同步電機(jī)直接轉(zhuǎn)矩控制(PMSM-DTC)simulink仿真整體框圖 永磁同步電機(jī)電機(jī)模塊?磁鏈和轉(zhuǎn)矩滯環(huán)比較模塊 轉(zhuǎn)速環(huán)pi模塊
2023-03-15 09:38:173 電機(jī)速度控制的方法有很多種,下面列舉幾種常見的方法:
1.?電壓調(diào)節(jié)法:
通過改變電機(jī)繞組的電壓來改變轉(zhuǎn)速,可以調(diào)整電機(jī)轉(zhuǎn)速但效率不高,控制精度低,一般不采用。
2023-03-26 22:16:423422 電機(jī)速度控制的方法有很多種,下面列舉幾種常見的方法:
1.?電壓調(diào)節(jié)法:
通過改變電機(jī)繞組的電壓來改變轉(zhuǎn)速,可以調(diào)整電機(jī)轉(zhuǎn)速但效率不高,控制精度低,一般不采用。
2023-03-26 22:22:424112 電機(jī)的。
2. 控制精度不同:矢量控制器由于能夠高精度地控制電機(jī)轉(zhuǎn)矩和轉(zhuǎn)速,因此具有更高的控制精度,能夠適用于高精密度的控制領(lǐng)域。而正弦波控制器則不如矢量控制器的控制精度高,適用于一些低精度控制。
2023-03-28 15:55:4214666 磁鏈滯環(huán)比較模塊 ? 轉(zhuǎn)矩滯環(huán)比較模塊 坐標(biāo)變換模塊 電壓矢量選擇模塊 輸出結(jié)果 轉(zhuǎn)速 ?磁鏈 轉(zhuǎn)矩 結(jié)論異步電機(jī)直接轉(zhuǎn)矩控制(Asynchronous DTC)完整仿真框圖 異步電機(jī)模塊 磁鏈計(jì)算模塊 內(nèi)
2023-03-29 10:37:306 伺服電機(jī)泛指各種帶有編碼器結(jié)構(gòu),可以進(jìn)行運(yùn)動(dòng)狀態(tài)反饋的電機(jī)系統(tǒng)。我們?cè)谶M(jìn)行伺服電機(jī)選型時(shí),最關(guān)注的無(wú)外乎電機(jī)的轉(zhuǎn)速轉(zhuǎn)矩以及位移精度等等。當(dāng)然,電機(jī)的可靠性穩(wěn)定性也是十分重要的。電機(jī)的轉(zhuǎn)矩越大,說明
2023-04-07 07:10:04996 閉環(huán)控制是指變頻器對(duì)電機(jī)的輸出頻率和轉(zhuǎn)速進(jìn)行反饋控制,通過對(duì)電機(jī)的轉(zhuǎn)速進(jìn)行監(jiān)測(cè)和調(diào)節(jié),實(shí)現(xiàn)對(duì)電機(jī)的精確控制。這種控制方式精度高、穩(wěn)定性好,適用于對(duì)控制精度要求較高的應(yīng)用場(chǎng)合。
2023-05-11 15:21:091814 我們?cè)谶x擇伺服電機(jī)的時(shí)候,最關(guān)心的參數(shù)便是額定轉(zhuǎn)速以及額定轉(zhuǎn)矩。那么,它們之間的關(guān)系是怎么的呢?它們之間如何進(jìn)行換算呢?簡(jiǎn)單說一下。 先說關(guān)系,電機(jī)的轉(zhuǎn)速與轉(zhuǎn)矩是成反比例關(guān)系的,轉(zhuǎn)速越高,轉(zhuǎn)矩越小
2023-05-20 12:55:013799 伺服電機(jī)是一種常用于控制精度要求較高的機(jī)械設(shè)備的電機(jī)。它通過精密的控制裝置來保持輸出轉(zhuǎn)矩或轉(zhuǎn)速的穩(wěn)定性,實(shí)現(xiàn)高精度的運(yùn)動(dòng)控制。伺服電機(jī)內(nèi)部包含了控制器、編碼器、功率放大器和電機(jī)等幾個(gè)主要組成部分,它們協(xié)同工作來實(shí)現(xiàn)控制。
2023-08-26 11:11:272504 轉(zhuǎn)矩模式下如何控制電機(jī)速度 在轉(zhuǎn)矩模式下,控制電機(jī)速度的基本原理是將轉(zhuǎn)矩需求轉(zhuǎn)換為相應(yīng)的電流輸出,通過控制電機(jī)的電流來實(shí)現(xiàn)轉(zhuǎn)速控制。以下是一般的步驟和方法: 1. 設(shè)定轉(zhuǎn)矩需求:根據(jù)應(yīng)用需求,設(shè)定
2024-02-21 17:53:35453
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論