 電子發(fā)燒友App
電子發(fā)燒友App


主動(dòng)懸架是車輛上的一種汽車懸架。它使用車載系統(tǒng)來控制車輪相對于底盤或車身的垂直運(yùn)動(dòng),而不是由大彈簧提供的被動(dòng)懸架,后者的運(yùn)動(dòng)完全由路面決定。主動(dòng)懸架分為兩類:真正的主動(dòng)懸架和自適應(yīng)或半主動(dòng)懸架。半自適應(yīng)懸架僅改變減震器的硬度以適應(yīng)不斷變化的道路或動(dòng)態(tài)條件,而主動(dòng)懸架使用某種類型的執(zhí)行器在每個(gè)車輪處獨(dú)立升高和降低底盤。主動(dòng)懸架系統(tǒng)提供更好的乘坐舒適性和車輛穩(wěn)定性。但與半主動(dòng)或被動(dòng)懸架系統(tǒng)相比,它的成本太高。
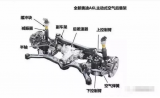
然而,在越來越智能化的汽車發(fā)展思路上,主動(dòng)懸架確實(shí)也是大伙兒研究的一個(gè)主要方向。比如奔馳S級主動(dòng)懸掛系統(tǒng)可通過攝像頭探測路面起伏情況,然后讓懸掛系統(tǒng)主動(dòng)調(diào)節(jié)車輪高度而使車身在不平整的路面上仍能保持水平。讓駕乘體驗(yàn)就像坐在魔毯漂浮在路面上一樣。魔毯懸掛因此而得名。這種結(jié)合智能感知+主動(dòng)懸掛應(yīng)用在汽車智能駕駛上的優(yōu)勢可以提供全時(shí)車身穩(wěn)定功能,并賦予汽車更好的駕乘感受,使令人不適的車身運(yùn)動(dòng)最小化,從而消減車身顛簸和側(cè)傾。
因此,本系列文章將以兩個(gè)不同的方向分別講解魔毯式主動(dòng)懸架的應(yīng)用理論。其中包括主動(dòng)懸架自身設(shè)計(jì)原理和智能感知路面預(yù)瞄原理及性能指標(biāo)設(shè)計(jì)。本文將詳細(xì)介紹主動(dòng)懸架功能原理設(shè)計(jì)。
主動(dòng)懸架設(shè)計(jì)原理
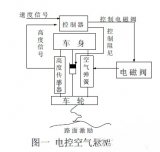
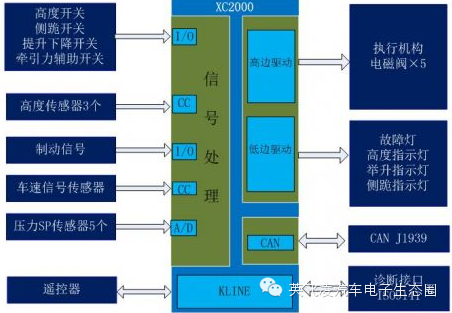
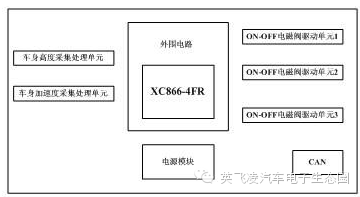
主動(dòng)懸架系統(tǒng)是在車輛的簧載質(zhì)量和非簧載質(zhì)量之間運(yùn)行。它最大限度地減少了由道路和車輛動(dòng)力學(xué)引起的垂直加速度和車輛振動(dòng),提高了車輛的操控性和穩(wěn)定性。主動(dòng)懸架系統(tǒng)包括液壓回路、傳感器和控制系統(tǒng)。大多數(shù)已經(jīng)達(dá)到硬件開發(fā)和量產(chǎn)階段的主動(dòng)懸架都使用了某種形式的電液執(zhí)行器。
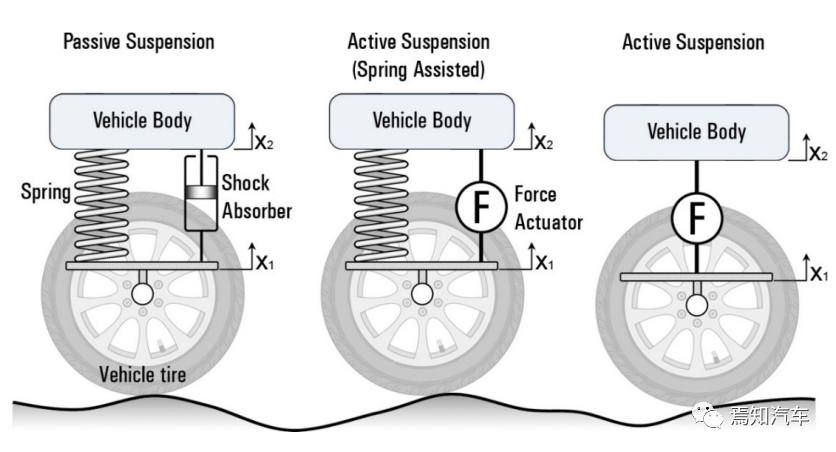
圖1 主動(dòng)懸架框架
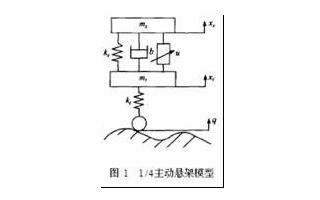
如下圖 2所示的四分之一車輛模型。從達(dá)到行駛穩(wěn)態(tài)的時(shí)間上講,主動(dòng)懸架和被動(dòng)懸架都可以做到,但是主動(dòng)懸架的沖擊明顯比被動(dòng)懸架小很多,這會(huì)在乘坐舒適性和車輛穩(wěn)定性之間取得更好的折衷。
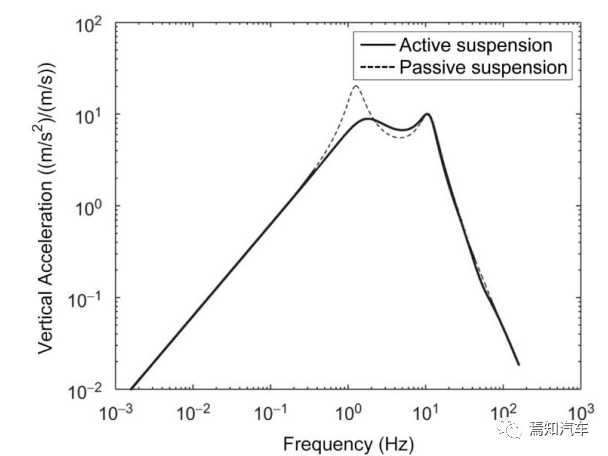
圖2 主動(dòng)和被動(dòng)懸架的加速度頻率響應(yīng)
目前公認(rèn)的有兩種形式的主動(dòng)懸架。第一種是快速主動(dòng)懸掛或高帶寬系統(tǒng) (HB),通常稱為全主動(dòng)。第二種是慢速主動(dòng)懸掛或低帶寬系統(tǒng) (LB)。在主動(dòng)懸架中,被動(dòng)阻尼器和彈簧都被力致動(dòng)器取代,如下圖3所示。
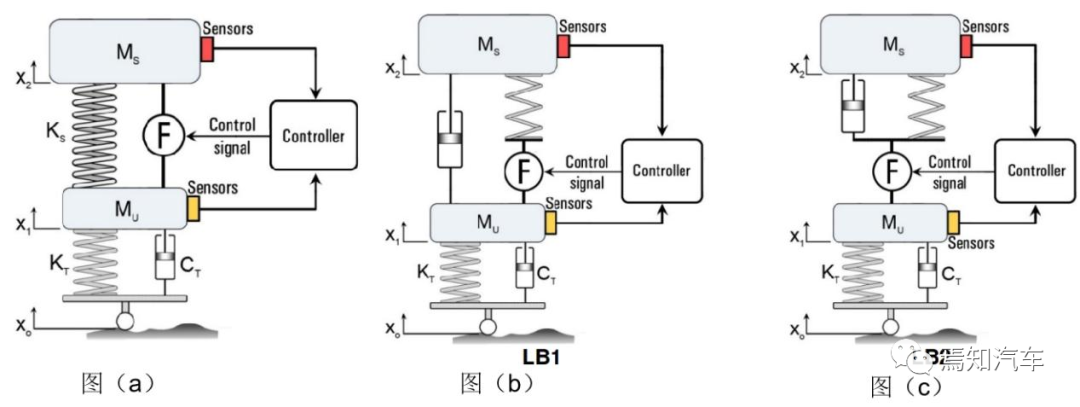
圖3 不同主動(dòng)懸架系統(tǒng)的組成設(shè)計(jì)原理
全主動(dòng)懸掛系統(tǒng)(高帶寬)也稱為高帶寬,將致動(dòng)器放置在簧載質(zhì)量和非簧載質(zhì)量之間。高帶寬系統(tǒng)的主要功能是在整個(gè)系統(tǒng)的全帶寬范圍內(nèi)對系統(tǒng)進(jìn)行控制。具體來說,這意味著它的目的是增強(qiáng)圍繞嘎嘎聲空間頻率(從 10 到 12 赫茲)和輪胎跳躍頻率(從 3 到 4 赫茲)的懸架響應(yīng)。
前期,也有利用電液伺服系統(tǒng) (EHS) 建立主動(dòng)懸架系統(tǒng),并采用了首次申請的壓力控制閥。懸架由微處理器和加速度傳感器控制,系統(tǒng)強(qiáng)調(diào)天鉤阻尼器,與傳統(tǒng)的低頻懸架相比,它可以減少車身振動(dòng),這是通過相對于其絕對速度向身體施加主動(dòng)阻尼力來實(shí)現(xiàn)的。液壓系統(tǒng)具有依賴于道路輸入激勵(lì)頻率的被動(dòng)阻尼特性。這些特性的增強(qiáng)會(huì)減少高頻路面輸入產(chǎn)生的振動(dòng)。
主動(dòng)懸架系統(tǒng)中使用的硬件,范圍從簡單的擺動(dòng)阻尼器、半主動(dòng)阻尼器、低帶寬/軟主動(dòng)懸架到高帶寬/剛性主動(dòng)懸架有所不同。自適應(yīng)和半主動(dòng)裝置是改善直線行駛和處理瞬態(tài)性能的有效手段,雖然它們在行駛中提供的改進(jìn)不如主動(dòng)懸架那么大。
慢速主動(dòng)懸掛系統(tǒng)(低帶寬)適用于低帶寬操作。在該系統(tǒng)中,執(zhí)行器與彈簧和/或阻尼器串聯(lián)放置。慢速主動(dòng)懸架系統(tǒng)(在小于 3 Hz 的低帶寬下運(yùn)行)旨在實(shí)現(xiàn)懸架在較低頻率范圍內(nèi)的控制策略,特別是在發(fā)出嘎嘎聲空間頻率附近。在較高頻率下,致動(dòng)器有效地鎖定,因此輪跳運(yùn)動(dòng)受到被動(dòng)控制。與高帶寬系統(tǒng)相比,低帶寬系統(tǒng)可以在機(jī)動(dòng)過程中以更低的能耗實(shí)現(xiàn)車身側(cè)傾和俯仰的顯著降低。為了提供超出受控帶寬的懸掛作用,執(zhí)行器必須與傳統(tǒng)彈簧串聯(lián)安裝,這反過來又降低了系統(tǒng)的能量需求。
目前主要有兩種形式的低帶寬系統(tǒng),如上圖3(b)(c)所示,一種形式是執(zhí)行器與道路彈簧串聯(lián),并具有單獨(dú)的被動(dòng)阻尼器(LB1),另一種形式是執(zhí)行器位于彈簧和阻尼器系列 (LB2)。在慢速主動(dòng)懸架中,被動(dòng)彈簧在高頻下可以提供所需的隔離,而執(zhí)行器在該頻率下可以提供振動(dòng)控制低頻(通常低于 3 赫茲)。
理論研究表明,有限帶寬有源系統(tǒng)的性能與全有源系統(tǒng)相似,但成本和實(shí)施復(fù)雜性較低。這些基于四分之一汽車模型的研究表明,當(dāng)假定組件處于理想化狀態(tài)且車輛在直線行駛條件下運(yùn)行時(shí),功率需求將非常適中。該系統(tǒng)的一些可能實(shí)際實(shí)施部分已經(jīng)通過使用液壓氣動(dòng)元件提出,例如帶有閥門的氣動(dòng)彈簧來控制空氣供應(yīng)和排氣。
由于致動(dòng)器只需要 3-4 Hz 的窄帶寬,因此慢速主動(dòng)懸架系統(tǒng)比需要寬帶致動(dòng)器的全主動(dòng)懸架系統(tǒng)便宜得多。但主動(dòng)控制仍然包含彈跳、俯仰和側(cè)傾中身體共振頻率的正常范圍,以及就對轉(zhuǎn)向控制的響應(yīng)而言感興趣的頻率范圍。因此,慢速主動(dòng)懸浮液是商業(yè)上可行的替代方案。
主動(dòng)懸架系統(tǒng)主要工作數(shù)學(xué)模型
1)電液伺服閥的數(shù)學(xué)模型
由于EHSV 的數(shù)學(xué)模型由 27 個(gè)方程描述,為簡化起見,在全主動(dòng)懸架系統(tǒng)模型中不再使用典型的EHSV 模型,因?yàn)橛?jì)算和迭代過程需要很長時(shí)間。因此,找到 EHSV 的等效傳遞函數(shù)很重要。為此,計(jì)算了致動(dòng)器位移可以進(jìn)一步得到輸入電流的瞬態(tài)響應(yīng)。發(fā)現(xiàn)閥芯位移的階躍響應(yīng)表現(xiàn)得像一個(gè)過阻尼二階系統(tǒng),這可以用二階系統(tǒng)的以下傳遞函數(shù)來描述。
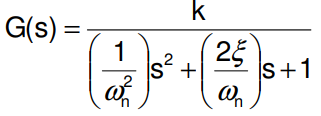
該傳遞函數(shù)中需要計(jì)算相應(yīng)的代表性傳遞函數(shù)的系數(shù) k、ωn 和 ξ。增益值 (k) 是穩(wěn)態(tài)條件下的閥芯位移除以勵(lì)磁電流值 10 mA。ωn 和ξ的值可以通過運(yùn)行Simulink 程序計(jì)算的。
2)液壓氣動(dòng)懸掛裝置的數(shù)學(xué)模型
液氣懸架裝置方案如下圖所示。該系統(tǒng)的數(shù)學(xué)模型是通過應(yīng)用描述懸架單元?jiǎng)討B(tài)行為的方程式開發(fā)的。
以下等式描述了這個(gè)系統(tǒng)。

其中,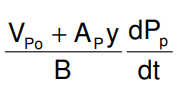 是一個(gè)考慮活塞腔壓縮性影響的術(shù)語。
是一個(gè)考慮活塞腔壓縮性影響的術(shù)語。
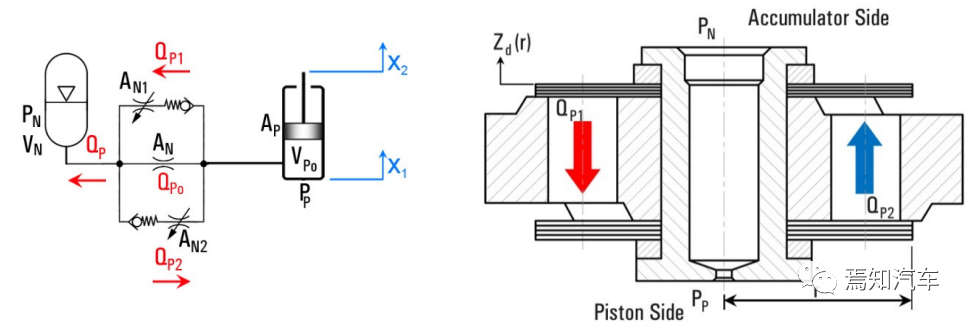
圖4.液壓氣動(dòng)懸架示意圖 圖5.液壓氣動(dòng)懸架裝置的阻尼系統(tǒng)閥門
如圖4所示阻尼系統(tǒng)壓縮和回彈沖程中的可變節(jié)流孔區(qū)域由四個(gè)孔組成,孔上覆蓋著一塊鉚接在其中心的圓形薄板。
3)四分之一車輛懸架參數(shù)
四分之一汽車模型的數(shù)學(xué)描述如下:
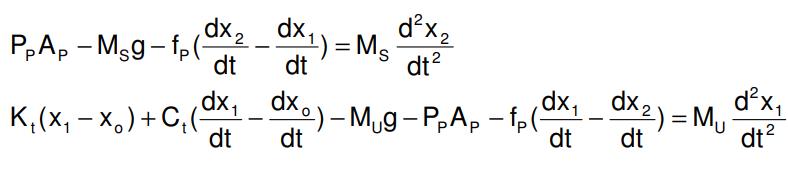
減震器的阻尼系數(shù) (CS) 是根據(jù)經(jīng)過驗(yàn)證的阻尼器仿真模型即時(shí)計(jì)算的。F(t) 是作用在車輪上并由表面不規(guī)則引起的激勵(lì)。如果 xo 是表面輪廓的高程,ox&則代表輪胎在地面接觸點(diǎn)的垂直速度,它是道路輪廓的坡度乘以車輛的前進(jìn)速度。
主動(dòng)懸架系統(tǒng)設(shè)計(jì)
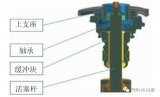
本文將詳細(xì)講解一種典型的主動(dòng)懸架工作模型如下圖所示,可以很好的幫助讀者很快的理解主動(dòng)懸架的工作過程。該模型主要由電液伺服閥、執(zhí)行器、空氣彈簧、LVDT 和控制器組成。電液驅(qū)動(dòng)器廣泛用于主動(dòng)懸架的設(shè)計(jì)中,從精度和速度的角度來看,電液伺服系統(tǒng)提供了良好的控制。
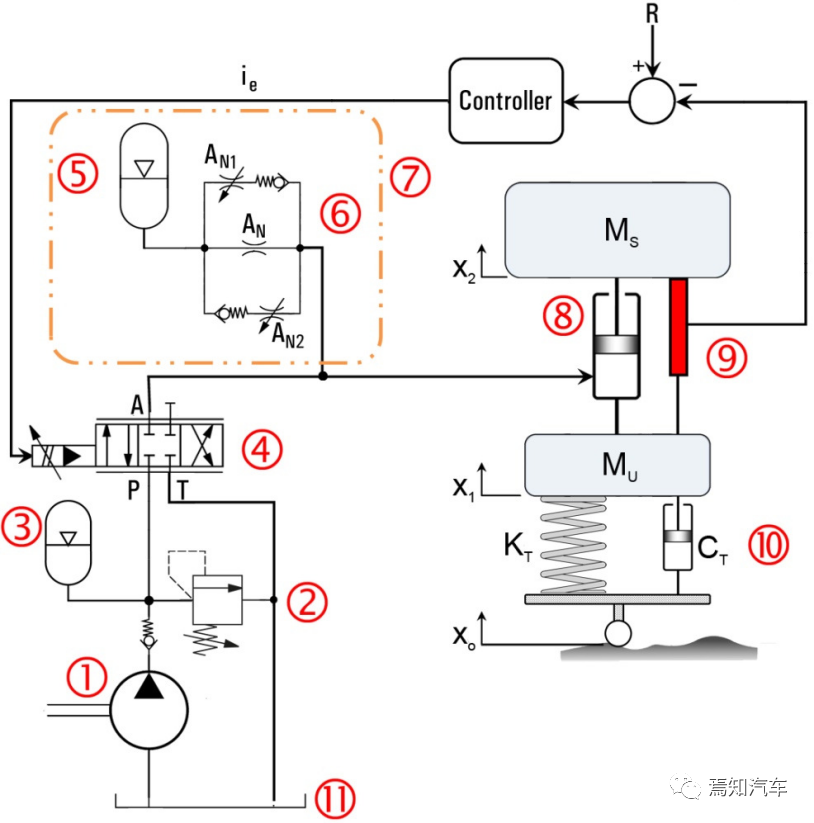
(1)液壓泵 (2) 溢流閥 (3) 蓄能器 (4) EHSV (5) 蓄能器 (6) 節(jié)流閥 (7) 氣彈簧 (8) 液壓執(zhí)行器 (9) LVDT ?(10) 輪胎(彈簧+減震器) (11) 油箱
圖6? 主動(dòng)懸架工作模型
選擇輸出控制變量以實(shí)現(xiàn)車身所需的動(dòng)態(tài)響應(yīng),構(gòu)建測量反饋值的控制結(jié)構(gòu),確定了測量裝置。設(shè)計(jì)的主動(dòng)懸架系統(tǒng)的運(yùn)行分為三種模式;中性模式,壓縮模式和回彈模式。
1)中性模式
當(dāng)車輛在非常平坦的路面上行駛或車輛停止時(shí),表示沒有來自路面的輸入位移,車身與車輪總成之間沒有任何相對運(yùn)動(dòng)。來自 LVDT 和加速度計(jì)的反饋電流為零,并且到伺服閥的誤差信號 (ie) 為零。如上圖(4)所示,此時(shí)EHSV 的閥芯處于中位。
2)壓縮模式
如果車輛遇到路面顛簸,車輪組件會(huì)向上移動(dòng),并且車身與車輪之間的距離減小。來自 LVDT 和加速度計(jì)的反饋電流增加,并且到伺服閥的誤差信號也隨即增加。壓力 (P2) 也將同步增加,閥芯向左移動(dòng)。活塞室部分連接到油箱,以允許油流運(yùn)動(dòng)由于活塞的運(yùn)動(dòng)被引導(dǎo)到油箱,這一過程中幾乎使車身保持在同一水平面上。
3)回彈模式
在坑洼回彈行程中,車輪總成向下運(yùn)動(dòng),車身與車輪總成的距離增大。結(jié)果,反饋電流增加,同時(shí) EHSV 的負(fù)誤差信號 (ie) 也隨即增加。
油流運(yùn)動(dòng)增加到左側(cè)閥芯室,壓力(P1)增加,因此閥芯向右移動(dòng),氣缸室與壓力管路相連,油流到活塞室以補(bǔ)償活塞向外運(yùn)動(dòng),這樣可以盡量使車身保持在同一水平面上。
偽微分回授控制PDF在主動(dòng)懸架PID中的應(yīng)用
對于主動(dòng)懸架的調(diào)節(jié)而言,通常也是采用比較典型的比例-積分-微分控制器(PID 控制器)來控制回路反饋。PID 控制過程是將“誤差”值計(jì)算為測量輸出值與所需設(shè)定點(diǎn)之間的差值,控制器試圖通過調(diào)整實(shí)際設(shè)備控制輸入來最小化誤差。
對于典型的階躍輸入,包含微分器塊的 PID 模塊會(huì)引起系統(tǒng)響應(yīng)的突然高幅度峰值。為了消除這種缺點(diǎn),需要在反饋路徑中引入微分操作,并改善系統(tǒng)的響應(yīng)。PDF控制(pseudo-derivative feedback control)的基本思想是避免系統(tǒng)內(nèi)部出現(xiàn)較大的控制信號(會(huì)引起飽和現(xiàn)象)。因此,在 PDF 控制器中,系統(tǒng)響應(yīng)是高度可接受的,可以設(shè)置點(diǎn)跳躍來避免由于傳統(tǒng) PID 控制器的正向路徑中存在微分器而產(chǎn)生的脈沖沖擊。
此外,該系統(tǒng)可以保證較低的非同步誤差。通過將比例和微分控制作用引入反饋路徑,可以為 Kp 和 Td 選擇比 PID 控制可能值更大的值。因此,PDF 控制系統(tǒng)可以比 PID 控制的情況更快地衰減干擾的影響。因此,研究主動(dòng)懸架系統(tǒng) PID 和 PDF 控制器的動(dòng)態(tài)性能將有利于對整個(gè)主動(dòng)懸架系統(tǒng)的應(yīng)用策略優(yōu)化。
以下將詳細(xì)說明這兩種調(diào)節(jié)機(jī)制在主動(dòng)懸架中的應(yīng)用,以方便更好的研究車輛主動(dòng)懸架系統(tǒng)的動(dòng)態(tài)性能。
本文介紹了一種配備主動(dòng)懸架系統(tǒng)的四分之一車輛的設(shè)計(jì),通過為受控系統(tǒng)開發(fā)數(shù)學(xué)模型和開發(fā)計(jì)算機(jī)模擬程序來評估系統(tǒng)的動(dòng)態(tài)行為。該系統(tǒng)包含一個(gè)由比例積分微分 (PID) 控制器或者使用偽微分反饋控制器 (PDF)控制的電液伺服系統(tǒng) 。兩個(gè)控制器的參數(shù)都經(jīng)過估計(jì)和調(diào)整,以最小化平方誤差積分 (ISE) 和時(shí)間絕對誤差積分 (ITAE) 標(biāo)準(zhǔn)。比例微分 (PD) 控制器提供最短的穩(wěn)定時(shí)間。PDF 控制器顯示可忽略的最大超調(diào)百分比,而 PID 顯示最大百分比超調(diào)在 5% 以內(nèi)。比例、積分 (PI) 和 PD 顯示出較長的穩(wěn)定時(shí)間。
1)PID控制器的設(shè)計(jì)
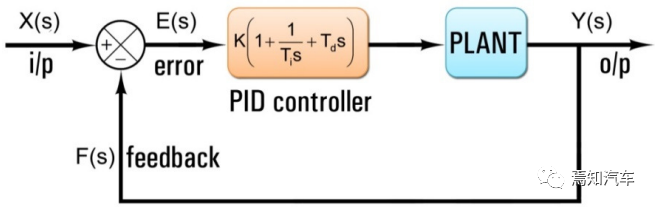
PID 控制器計(jì)算算法涉及三個(gè)獨(dú)立的常量參數(shù),因此有時(shí)也稱為三項(xiàng)控制:比例值、積分值和微分值,分別表示為 P、I 和 D(如下圖)。比例項(xiàng) P 取決于當(dāng)前誤差,積分項(xiàng) I 取決于過去誤差的累積,導(dǎo)數(shù)項(xiàng) D 是基于當(dāng)前變化率對未來誤差的預(yù)測。這三個(gè)動(dòng)作的加權(quán)總和用于通過控制元件(例如控制閥或阻尼器的位置)來調(diào)整設(shè)備或過程。
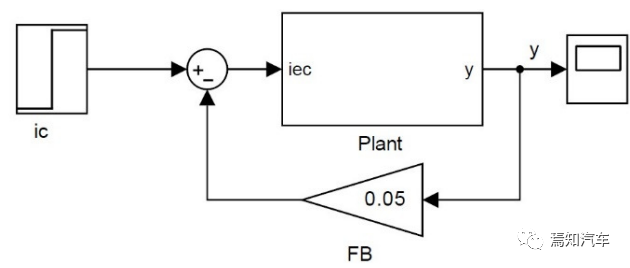
2)PID 控制器在閉環(huán)系統(tǒng)中的連接
選擇控制器參數(shù)以滿足給定性能規(guī)范的過程稱為控制器調(diào)整。建議根據(jù)實(shí)驗(yàn)階躍響應(yīng)或 Ku 值調(diào)整 PID 控制器(即設(shè)置 Kp、Td 和 Ti 值)的規(guī)則,這會(huì)在僅使用比例控制動(dòng)作時(shí)導(dǎo)致邊際穩(wěn)定性。當(dāng)數(shù)學(xué)模型未知時(shí),采用Ziegler-Nichols規(guī)則很有用。此類規(guī)則建議一組 Kp、Td 和 Ti 值,這將使系統(tǒng)穩(wěn)定運(yùn)行。然而,最終系統(tǒng)可能會(huì)在階躍響應(yīng)中表現(xiàn)出較大的最大過沖,這是不可接受的。在這種情況下,我們需要進(jìn)行一系列微調(diào),直到獲得可接受的結(jié)果。事實(shí)上,Ziegler-Nichols 調(diào)整規(guī)則給出了對參數(shù)值極有根據(jù)的猜測,并提供了微調(diào)的起點(diǎn),而不是一次性給出 Kp、Ti 和 Td 的最終設(shè)置。
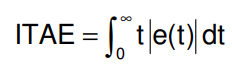
在此,本研究使用 PID 控制器參數(shù)的第一次估計(jì)是根據(jù)第一個(gè) Ziegler-Nichols 方法進(jìn)行的。此外,后續(xù)的手動(dòng)進(jìn)行微調(diào)過程也可以找到控制器的參數(shù);K、Ti和Td,確保時(shí)間絕對誤差積分(ITAE)性能指標(biāo)的最小值。
對應(yīng)的ITAE定義如下:
一些應(yīng)用程序可能只需要使用一個(gè)或兩個(gè)操作來提供適當(dāng)?shù)南到y(tǒng)控制。這是通過將其他參數(shù)設(shè)置為零來實(shí)現(xiàn)的。如果沒有相應(yīng)的控制動(dòng)作,PID 控制器將被稱為 PI、PD、P 或 I 控制器。PI 控制器相當(dāng)普遍,因?yàn)槲⒎肿饔脤y量噪聲很敏感。控制器的常數(shù)經(jīng)過計(jì)算和微調(diào)。帶有比例控制器的系統(tǒng)的階躍響應(yīng)表明,適當(dāng)比例控制器的實(shí)施將穩(wěn)定時(shí)間從 5.26 秒減少到 0.65 秒。但是,這個(gè)結(jié)論不能一概而論。比例控制器與不可忽略的穩(wěn)態(tài)誤差相關(guān)聯(lián),除非設(shè)備包含積分元件。
2)PDF控制器的設(shè)計(jì)
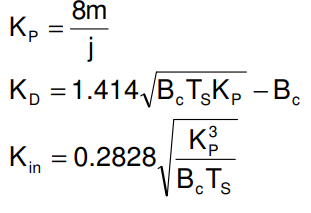
已有理論提出了一組用于估計(jì)控制器增益常數(shù)的第一近似值的公式;Kp、KD 和 Ki,從中開始微調(diào)。這些公式是分析和實(shí)驗(yàn)結(jié)果的組合。這些公式基于需要基本線性輸出響應(yīng)的最大階躍輸入。因此,PDF 控制器的開發(fā)需要系統(tǒng)的開環(huán)表示,通過一階或二階傳遞函數(shù)。為此,計(jì)算了系統(tǒng)對階躍輸入電流 i 的瞬態(tài)響應(yīng),用于應(yīng)用階躍的不同幅度。主動(dòng)懸架系統(tǒng)呈現(xiàn)的階躍響應(yīng)顯然類似于二階元件的階躍響應(yīng),其傳遞函數(shù)由如下公式給出:
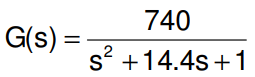
3)主動(dòng)懸架系統(tǒng)的階躍響應(yīng)及等效代表模型
從以上方程式可以計(jì)算 PDF 控制器常數(shù)的一階近似值。PDF 控制器的調(diào)整是通過找到系數(shù) Kp、KD、Kin 的最佳組合來實(shí)現(xiàn)最佳系統(tǒng)響應(yīng)參數(shù)提供。
如下圖表示了PID和PDF對于響應(yīng)的控制結(jié)果對比圖。
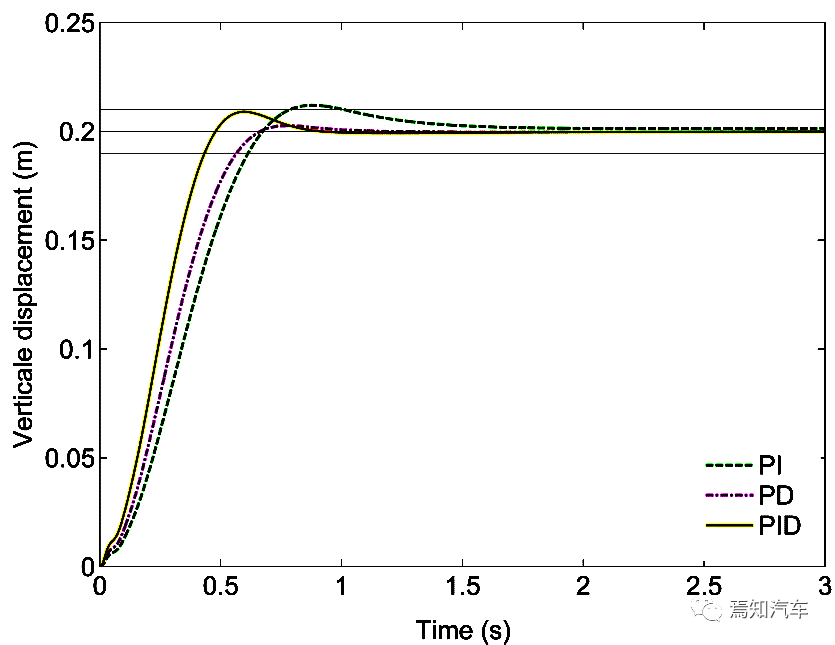
PID 控制器給出了最好的結(jié)果,主要是在沉降水平上時(shí)間。并且 PD 控制器給出了最小最大百分比過沖。微分作用可預(yù)測系統(tǒng)行為,從而改善系統(tǒng)的穩(wěn)定時(shí)間和穩(wěn)定性。然而,微分作用很少在實(shí)踐中使用,因?yàn)樗鼘y量噪聲具有固有的敏感性。如果這種噪聲足夠嚴(yán)重,則微分作用將不穩(wěn)定并且實(shí)際上會(huì)降低控制性能。測量誤差的大而突然的變化(通常發(fā)生在設(shè)定點(diǎn)改變時(shí))會(huì)導(dǎo)致突然的、大的控制動(dòng)作,源于微分項(xiàng),這被稱為微分突跳。如果測量誤差通過線性低通濾波器或非線性但簡單的中值濾波器,則可以在一定程度上改善此問題。
PI 控制器很常見,因?yàn)槲⒎肿饔脤y量噪聲很敏感。但是由于在所研究的主動(dòng)懸架中包含一個(gè)積分元件,因此該控制器的功能并沒有出現(xiàn)在這里。
審核編輯:湯梓紅














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論