 電子發(fā)燒友App
電子發(fā)燒友App


作者簡介
Dr. Liu,劍橋大學博士,是復睿微電子英國研究中心AI算法專家,常駐英國劍橋研究所。長期從事和深耕信號處理和深度學習領域,是機器人定位領域理論專家。在圖神經(jīng)網(wǎng)絡,強化學習,機器人路徑規(guī)劃與導航領域發(fā)表了大量論文,目前從事GRUK自動駕駛規(guī)控決策領域重點前沿研發(fā)。
一、引言:
隨著科技的飛速發(fā)展,自動駕駛技術(shù)逐漸走進了人們的視野。在過去的幾年里,特斯拉、Waymo和Uber等公司在自動駕駛領域的投入和研發(fā)引起了廣泛關(guān)注。盡管自動駕駛技術(shù)有望改變交通行業(yè),帶來諸多便利,但在其廣泛應用之前,我們還需要解決許多關(guān)鍵問題和挑戰(zhàn)。本文將重點關(guān)注自動駕駛規(guī)控決策方面的問題和挑戰(zhàn),分析當前所面臨的困境,并提出一些建設性的建議與解決方向。
我們首先將深入剖析目前在制定自動駕駛規(guī)控策略過程中所面臨的問題和挑戰(zhàn),如模型泛化、安全性可靠性、計算效率等。最后,結(jié)合國內(nèi)外的先進經(jīng)驗與實踐,我們將提出潛在的解決方向與趨勢,以期為自動駕駛技術(shù)的發(fā)展和普及提供有益的參考。
通過本文的闡述,我們希望能夠提高人們對自動駕駛規(guī)控決策問題和挑戰(zhàn)的認識,促使業(yè)界加強合作與溝通,共同應對未來自動駕駛技術(shù)帶來的挑戰(zhàn),為人類社會帶來更為安全、高效、可持續(xù)的交通出行方式。
二、規(guī)控決策的重要性:
規(guī)控決策在自動駕駛領域的重要性不容忽視,因為它直接影響到自動駕駛技術(shù)實際應用的成功與否。首先,規(guī)控決策對于確保自動駕駛車輛的安全性至關(guān)重要,通過合理的規(guī)控,可以有效地降低交通事故的發(fā)生率,確保人們的生命財產(chǎn)安全。其次,高效的規(guī)控決策有助于提升道路通行效率,緩解交通擁堵,降低能源消耗和尾氣排放,從而為實現(xiàn)可持續(xù)交通發(fā)展做出貢獻。
此外,規(guī)控決策還需要充分考慮法規(guī)合規(guī)性,這意味著自動駕駛技術(shù)的發(fā)展必須在法律框架內(nèi)進行,以確保道路安全并維護公共利益。規(guī)范的規(guī)控決策將有助于引導自動駕駛技術(shù)朝著更加合規(guī)、安全的方向發(fā)展。同時,公眾對自動駕駛技術(shù)的信任度也是衡量規(guī)控決策重要性的一個關(guān)鍵因素。通過透明、合理的規(guī)控,可以加強公眾對自動駕駛技術(shù)的信任,為其更廣泛的應用奠定基礎。
綜上所述,規(guī)控決策在自動駕駛領域具有舉足輕重的地位。它關(guān)乎自動駕駛系統(tǒng)的安全性、效率、法規(guī)合規(guī)性以及公眾接受度,為實現(xiàn)自動駕駛技術(shù)的成功實施與廣泛應用提供關(guān)鍵支持。因此,深入研究規(guī)控決策問題,尋求有效的解決方案,是推動自動駕駛技術(shù)健康發(fā)展的重要任務。
三、問題與挑戰(zhàn):
在接下來的文章中,我們將深入探討當前決策規(guī)劃在自動駕駛領域所面臨的問題與挑戰(zhàn),以及相關(guān)的潛在解決方向和趨勢。我們將重點關(guān)注以下幾個方面: ?
1.模型泛化
2.不確定性估計,數(shù)據(jù)質(zhì)量和數(shù)量評估
3.多智能體與智能體-環(huán)境交互
4.安全與可靠性
5.計算效率
6.利用多模態(tài)融合進行最優(yōu)決策
7.可解釋性和可說明性
8.無需高清地圖的自動駕駛
9.與現(xiàn)有基礎設施的集成
本篇文章將著重模型泛化、不確定性估計以及數(shù)據(jù)質(zhì)量和數(shù)量評估和多智能體與智能體-環(huán)境交互這三個方面
3.1 模型泛化
自動駕駛汽車必須具備在各種環(huán)境和多樣化條件下的運行能力。然而,這些環(huán)境和條件可能與用于開發(fā)決策模型的訓練數(shù)據(jù)存在差異,從而導致模型的泛化能力不足,即在新的和未曾遇到的情況下表現(xiàn)欠佳?[1]。自動駕駛模型應具備適應不斷變化的環(huán)境條件的能力,例如不同的光線、惡劣天氣、突發(fā)障礙、異常交通模式、多方交通參與者以及不同的道路表面,從而實現(xiàn)在這些多變環(huán)境中的多智能體互動模型的泛化能力。
為確保自動駕駛汽車的安全性和可靠性,模型必須對環(huán)境變化表現(xiàn)出魯棒性。反之,若對這些變化過于敏感的模型可能在泛化能力上不足,從而導致在實際駕駛場景中的表現(xiàn)不盡如人意。
潛在的解決方向和趨勢
1.正則化和Dropout:正則化和dropout技術(shù)在深度學習領域中被廣泛應用,它們可以幫助防止模型過擬合,從而提高模型的泛化能力?[3]。正則化方法主要通過在損失函數(shù)中添加懲罰項,以抑制過于復雜的模型,常見的正則化方法有L1和L2正則化。與此同時,Dropout作為另一種特殊的正則化技術(shù),其在訓練過程中通過隨機丟棄一部分神經(jīng)元,以減少網(wǎng)絡中參數(shù)的共適應現(xiàn)象,降低模型復雜度,并增強模型對噪聲和不同數(shù)據(jù)分布的適應性。這兩種技術(shù)在實踐中可以組合使用,共同提升深度學習模型在復雜應用場景中的穩(wěn)定性和可靠性。
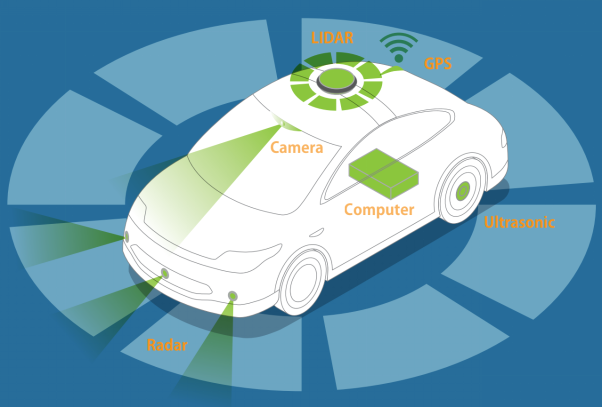
?圖2.?載有多傳感器的車輛?[4]
2.多傳感器融合:為了確保自動駕駛系統(tǒng)在面對各種環(huán)境變化時具有較高的魯棒性,開發(fā)出這種能夠適應復雜場景的模型至關(guān)重要。要實現(xiàn)這一目標,我們需要借助先進的算法處理諸如光線條件、天氣以及道路表面變化等多種因素。多傳感器融合技術(shù)可以有效提高系統(tǒng)的魯棒性,這主要通過整合來自不同類型傳感器(例如攝像頭、激光雷達以及雷達)的數(shù)據(jù)實現(xiàn)?[5]?[6]。這樣一來,自動駕駛系統(tǒng)將具備更全面、更精確的環(huán)境感知能力,從而提高整體的安全性和性能。
3.遷移學習/元學習/域適應/域泛化:遷移學習、元學習、域適應和域泛化等技術(shù)在自動駕駛系統(tǒng)中發(fā)揮著重要作用。遷移學習是一種強大的機器學習方法,它通過利用預訓練模型作為新模型訓練的基礎,從而提高模型的泛化能力?[7]。這種方法在自動駕駛領域尤為重要,因為它能夠有效減少訓練新模型所需的數(shù)據(jù)量,并在面對新的、未見過的數(shù)據(jù)時,提高自動駕駛系統(tǒng)的性能表現(xiàn)。元學習通過學習如何在不同任務之間迅速適應和轉(zhuǎn)移知識,進一步提高了自動駕駛系統(tǒng)在各種情況下的泛化性能。領域適應和領域泛化則關(guān)注如何在不同駕駛環(huán)境(如城市道路、鄉(xiāng)村道路或者不同國家的交通規(guī)則)下實現(xiàn)有效的知識遷移,使得自動駕駛系統(tǒng)具有更廣泛的適用性和更高的穩(wěn)定性?[8]。總之,這些先進的機器學習方法都在推動自動駕駛技術(shù)的發(fā)展,提升自動駕駛系統(tǒng)在不同場景下的安全性和可靠性。
4.人機交互:人機交互是一種將人類專家反饋納入模型訓練過程的先進技術(shù)?[9]。這種方法在自動駕駛系統(tǒng)中具有重要價值,因為它可以顯著提高模型的泛化能力,同時幫助及時發(fā)現(xiàn)那些僅僅依靠模擬或虛擬測試無法捕獲的潛在安全問題。通過人機交互技術(shù),自動駕駛系統(tǒng)能夠更好地理解復雜的駕駛場景,以及在特定情況下應采取的最佳行動。這有助于彌補傳統(tǒng)機器學習方法在面對異常或罕見情況時可能出現(xiàn)的不足。此外,這種方法還可以促進自動駕駛系統(tǒng)與人類駕駛員之間的協(xié)同作戰(zhàn),提高整體道路安全水平。總之,人機交互技術(shù)對于提升自動駕駛系統(tǒng)的性能、安全性以及可靠性具有重要意義。
3.2 不確定性估計,數(shù)據(jù)質(zhì)量和數(shù)量評估
自動駕駛系統(tǒng)的運行依賴于精密且復雜的決策方法,這要求對不確定性進行準確的估計,并對數(shù)據(jù)的質(zhì)量和數(shù)量進行全面的評估。這些高度先進的系統(tǒng)利用各種傳感器,如攝像頭、激光雷達和雷達,來獲取關(guān)于周圍環(huán)境的詳細信息,并基于這些數(shù)據(jù)作出行駛決策。然而,這些數(shù)據(jù)通常存在噪聲、不完整性,以及受到各種誤差來源的影響,這可能導致不準確的決策和潛在的不安全駕駛行為。因此,在開發(fā)和優(yōu)化自動駕駛系統(tǒng)時,關(guān)鍵是要設計出能夠有效識別和處理這些問題的算法,確保在各種情況下都能實現(xiàn)穩(wěn)定、安全的駕駛。
子挑戰(zhàn)
1.數(shù)據(jù)收集不確定性和質(zhì)量評估?[11]:傳感器信號可能受到天氣、光線、灰塵以及其他傳感器故障的顯著影響,導致我們無法準確知道傳感器數(shù)據(jù)的噪聲水平。此外,在訓練自動駕駛模型時,邊緣場景與正常場景之間往往存在訓練類別不平衡的問題,這使得我們難以獲取足夠的邊緣場景案例數(shù)據(jù)來進行有效的模型訓練。此外,自動駕駛系統(tǒng)還面臨著有偏訓練數(shù)據(jù)的問題。由于數(shù)據(jù)收集往往僅在非常有限或特定的場景中進行,這可能導致數(shù)據(jù)分布的偏斜,從而影響模型的泛化能力。
2.正確標注數(shù)據(jù)并正確推廣到大規(guī)模未標注數(shù)據(jù):首先,由領域?qū)<疫M行數(shù)據(jù)標注的成本非常高,這包括勞動和時間成本,以及標簽標準化在某些情況下可能存在的歧義?[12]。其次,在將已標注數(shù)據(jù)正確推廣到未標注數(shù)據(jù)方面也存在困難。自動駕駛系統(tǒng)需要將大量已標注的訓練數(shù)據(jù)輸入深度學習模型,但由于并非總能對所有訓練樣本進行手動標注,這可能導致模型訓練過程中梯度反向傳播的不準確,從而降低模型性能。最后,對錯誤標注數(shù)據(jù)的檢測和修訂也是一個棘手的問題。訓練樣本有時可能被錯誤地標注,因此需要開發(fā)有效的工具來檢測這些錯誤標簽并自動進行糾正。
3.微調(diào)模型結(jié)構(gòu)以最小化預測誤差和模型不確定性:尋找最優(yōu)模型結(jié)構(gòu)和超參數(shù)集是一個具有挑戰(zhàn)性的任務,因為它涉及到在龐大的參數(shù)空間中進行搜索和優(yōu)化。其次,微調(diào)過的深度學習模型在給定輸入輸出時通常只能提供確定性的點估計,而缺乏不確定性估計,這對于評估模型預測的可靠性具有很大的局限性。最后,在模型訓練階段解耦噪聲成分也是一個難以解決的問題。檢測和診斷噪聲來源對于可靠地控制車輛至關(guān)重要,但實際操作中卻十分困難。
潛在的解決方向和趨勢
1.數(shù)據(jù)收集的不確定性和質(zhì)量評估:首先,針對部署中未知的傳感器數(shù)據(jù)質(zhì)量問題,可以采用硬閾值工程解決方案來處理和過濾噪聲。其次,在解決邊緣場景與正常場景之間的訓練類別不平衡問題時,數(shù)據(jù)增強技術(shù)可以幫助改善數(shù)據(jù)分布,以提高模型在不同情況下的泛化能力?[13]。針對有偏訓練數(shù)據(jù)問題,可以通過重新采樣和數(shù)據(jù)增強來調(diào)整數(shù)據(jù)分布,以便在訓練過程中減輕偏差。通過應用這些方法,研究人員和工程師們可以在自動駕駛系統(tǒng)中實現(xiàn)更高的性能和穩(wěn)定性,從而提升整體的駕駛安全性。
2.正確標注數(shù)據(jù)并正確推廣到大規(guī)模未標注數(shù)據(jù):在自動駕駛系統(tǒng)的數(shù)據(jù)處理過程中,降低領域?qū)<疫M行數(shù)據(jù)標注的成本顯得尤為重要。為了實現(xiàn)這一目標,可以采用自動標注技術(shù)來減輕專家的工作負擔?[12]。在將已標注數(shù)據(jù)正確推廣到未標注數(shù)據(jù)方面,弱監(jiān)督學習和半監(jiān)督學習方法有望提供有效的解決方案,從而在有限的標注數(shù)據(jù)情況下實現(xiàn)更好的模型性能。此外,在錯誤標注數(shù)據(jù)的檢測和修訂方面,自動標注和自動標簽修正技術(shù)可以幫助發(fā)現(xiàn)并糾正錯誤的標簽,從而進一步提高數(shù)據(jù)質(zhì)量。
3.微調(diào)模型結(jié)構(gòu)以最小化預測誤差和模型不確定性:在自動駕駛系統(tǒng)中,尋找最優(yōu)模型結(jié)構(gòu)和超參數(shù)集是一項具有挑戰(zhàn)性的任務。針對這一問題,研究人員可以通過神經(jīng)結(jié)構(gòu)搜索技術(shù)或手動調(diào)整來進行優(yōu)化。另一方面,微調(diào)過的深度學習模型通常只能為給定輸入輸出提供確定性的點估計,而缺乏不確定性估計。為了解決這一問題,可以采用貝葉斯深度學習方法,例如MCDropout?[14],從而在預測時提供不確定性估計,有助于評估模型預測的可靠性。
3.3 多智能體與智能體-環(huán)境交互
在復雜的交通場景中,自動駕駛汽車需要與道路上的各種智能體進行高效且安全的互動,這些智能體包括其他自動駕駛汽車、人類駕駛的汽車、行人和騎自行車的人。這些智能體的行為可能具有難以預測的性質(zhì),因此對自動駕駛汽車的決策系統(tǒng)提出了巨大挑戰(zhàn)。一個智能體的行為可能會引發(fā)連鎖反應,從而影響環(huán)境中其他智能體的行為和動態(tài)。為了應對這種復雜性,自動駕駛系統(tǒng)需要具備高度的適應性和響應能力,以便在實時變化的交通環(huán)境中進行有效的決策。此外,自動駕駛汽車還需能夠根據(jù)實際情況預測其他智能體的意圖和行為,從而在確保行車安全的同時提高道路通行效率。
子挑戰(zhàn)
1.準確預測多個智能體的行為并做出決策?[16]:準確預測多個智能體(如乘客、其他駕駛員和行人)的行為并準確地做出相應的決策至關(guān)重要。這些智能體的行為通常受到周圍其他智能體的影響,因此自動駕駛系統(tǒng)需要具備高度的洞察能力和實時響應性。
2.人機自主交互,以避免可能導致碰撞的錯誤決策:隨著自動駕駛汽車與人類駕駛的汽車逐漸共存,深入研究駕駛員和乘客在各種情況下如何感知和與自動駕駛汽車互動變得越發(fā)關(guān)鍵。事實上,研究表明,人類與自動化系統(tǒng)的互動在不同的駕駛場景下表現(xiàn)出差異性,這為進一步了解和優(yōu)化人機自主交互提供了研究方向。
潛在的解決方向和趨勢
1.博弈論模型:博弈論模型是解決多智能體互動挑戰(zhàn)的有效方法之一?[17]?[18]。博弈論模型能夠有效地捕捉智能體之間的相互作用,為多智能體決策提供了有力的理論支持。博弈論模型可用于建模多個智能體(如自動駕駛汽車、人類駕駛的汽車、行人等)的行為,并在各種復雜場景中預測它們的行動。通過分析智能體之間的競爭與合作關(guān)系,博弈論模型有助于自動駕駛汽車作出更加合理的決策,以實現(xiàn)安全、高效的道路交通環(huán)境。

圖5.?博弈論模型示例?[19]
2.多智能體強化學習:多智能體強化學習是解決復雜交通環(huán)境中智能體交互問題的有力方法之一?[16]。多智能體強化學習是一種高效的學習策略,通過這種策略,各個智能體可以在不斷嘗試和犯錯的過程中學習彼此的交互行為,從而不斷優(yōu)化自身的決策策略。多智能體強化學習在自動駕駛領域的應用可以幫助車輛更好地理解和適應不同的交通場景,包括與其他自動駕駛車輛、人類駕駛車輛、行人等的交互。此外,通過領域自適應與遷移學習技術(shù),多智能體強化學習可以有效地在不同環(huán)境和場景中實現(xiàn)知識和策略的遷移,進一步提升自動駕駛系統(tǒng)的泛化能力。
四、小結(jié)
本文主要探討了自動駕駛領域的三個關(guān)鍵問題:模型泛化、不確定性估計與數(shù)據(jù)質(zhì)量和數(shù)量評估,以及多智能體與智能體-環(huán)境交互。在模型泛化方面,我們討論了如何通過遷移學習、領域適應和領域泛化技術(shù)來提高自動駕駛系統(tǒng)在不同場景下的性能。在不確定性估計與數(shù)據(jù)質(zhì)量和數(shù)量評估方面,我們強調(diào)了準確評估傳感器數(shù)據(jù)質(zhì)量、處理有偏訓練數(shù)據(jù)問題以及訓練類別不平衡的重要性。在多智能體與智能體-環(huán)境交互方面,我們關(guān)注了自動駕駛汽車如何通過博弈論模型和多智能體強化學習技術(shù)來實現(xiàn)與其他道路使用者的高效互動。在后續(xù)的文章中,我們將會繼續(xù)深入分析其他問題與挑戰(zhàn)。
參考引用
[1]S. Kuutti, . R. Bowden, . Y. Jin and P. Bar, “A Survey of Deep Learning Applications to Autonomous Vehicle Control,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, pp. 712-733, 2021.?
[2]IANS, “Mumbai Firm Genesys Empowering Self-Driving Cars in US with High-Precision HD Mapping,” 26 06 2018. [Online]. Available: https://beebom.com/mumbai-firm-empowering-self-driving-cars-in-us-with-high-precision-hd-mapping/. [Accessed 21 04 2023].
[3]?M. J. Mirza, J. Micorek, H. Possegger and H. Bischof, “The Norm Must Go On: Dynamic Unsupervised Domain Adaptation by Normalization,” in 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Hybrider Event, New Orleans, 2022.
[4]A. Novikova, “DON’T DRIVE ME CRAZY: FEATURES TO ENSURE SELF-DRIVING CAR SAFETY,” 14 08 2022. [Online]. Available: https://intersog.co.il/blog/dont-drive-me-crazy-features-to-ensure-self-driving-car-safety/. [Accessed 21 04 2023].
[5]H. Shao, L. Wang, R. Chen, H. Li and Y. Liu, “InterFuser: Safety-Enhanced Autonomous Driving Using Interpretable Sensor Fusion Transformer,” in 2022 Conference on Robot Learning, Auckland, New Zealand, 2022.?
[6]K. Chitta, A. Prakash, B. Jaeger, Z. Yu, K. Renz and A. Geiger, “TransFuser: Imitation with Transformer-Based Sensor Fusion for Autonomous Driving,” IEEE Transactions on Pattern Analysis and Machine Intelligence , 2022.?
[7]H. Shu, T. Liu, X. Mu and D. Cao, “Driving Tasks Transfer Using Deep Reinforcement Learning for Decision-Making of Autonomous Vehicles in Unsignalized Intersection,” IEEE Transactions on Vehicular Technology, vol. 71, pp. 41-52, 2022.?
[8]K. Zhou, Z. Liu, Y. Qiao, T. Xiang and C. C. Loy, “Domain Generalization: A Survey,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, pp. 4396-4415, 2023.?
[9]J. Wu, Z. Huang, C. Huang, Z. Hu, P. Hang, Y. Xing and C. Lv, “Human-in-the-Loop Deep Reinforcement Learning with Application to Autonomous Driving,” arXiv preprint arXiv:2104.07246., 2021.
[10]A. BAKER-CAMPBELL, “FAIR WEATHER FRIEND: HOW DO LIDAR SYSTEMS COPE IN RAIN & FOG?,” 18 12 2020. [Online]. Available: https://www.autovision-news.com/adas/lidar-systems-rain-fog/. [Accessed 21 04 2023].
[11]R. Michelmore, M. Wicker, L. Laurenti, L. Cardelli, Y. Gal and M. Kwiatkowska, “Uncertainty Quantification with Statistical Guarantees in End-to-End Autonomous Driving Control,” in 2020 IEEE international conference on robotics and automation (ICRA), 2020.?
[12]F. Lambert, “Tesla releases new footage of auto labeling tool for its self-driving effort,” 01 12 2021. [Online]. Available: https://electrek.co/2021/12/01/tesla-releases-new-footage-auto-labeling-tool-self-driving/. [Accessed 21 04 2023].
[13]W. Tong, J. Xie, T. Li, H. Deng, X. Geng, R. Zhou, D. Yang, B. Dai, L. Lu and H. Li, “3D Data Augmentation for Driving Scenes on Camera,” arXiv preprint arXiv:2303.10340., 2023.?
[14]P. Goel and L. Chen, “On the Robustness of Monte Carlo Dropout Trained with Noisy Labels,” in the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 2021.
[15]“Multi-agent behavior understanding for autonomous driving,” [Online]. Available: https://archiveweb.epfl.ch/transport.epfl.ch//research-overview/vehicles-infrastructures/intelligent-vehicles/adas-vita-en/.
[16]S. Shalev-Shwartz, S. Shammah and A. Shashua., “Safe, Multi-Agent, Reinforcement Learning for Autonomous Driving,” arXiv preprint arXiv:1610.03295, 2016.?
[17]J. F. Fisac, E. Bronstein, E. Stefansson, D. Sadigh, S. S. Sastry and A. D. Dragan, “Hierarchical Game-Theoretic Planning for Autonomous Vehicles,” in 2019 International conference on robotics and automation (ICRA), Montreal, Canada, 2019.?
[18]N. Smirnov, Y. Liu, A. Validi, W. Morales-Alvarez and C. Olaverri-Monreal, “A Game Theory-Based Approach for Modeling Autonomous Vehicle Behavior in Congested, Urban Lane-Changing Scenarios,” Sensors, vol. 21(4), p. 1523, 2021.?
[19]D. Cossins, “How to win at game theory,” 09 12 2015. [Online]. Available: https://www.newscientist.com/article/mg22830510-700-how-to-win-at-game-theory/. [Accessed 21 04 2023].
編輯:黃飛











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論