") 點(diǎn)云標(biāo)注在自動(dòng)駕駛中的實(shí)踐應(yīng)用與挑戰(zhàn)
點(diǎn)云標(biāo)注在自動(dòng)駕駛中的實(shí)踐應(yīng)用與挑戰(zhàn)
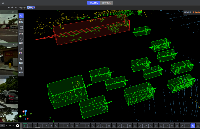
點(diǎn)云標(biāo)注在自動(dòng)駕駛中扮演著關(guān)鍵的角色,為自動(dòng)駕駛汽車的感知和決策提供了基礎(chǔ)。然而,實(shí)際應(yīng)用中仍然面臨一些挑戰(zhàn)需要解決。
首先,點(diǎn)云數(shù)據(jù)的多樣性和復(fù)雜性給標(biāo)注帶來了困難。在實(shí)際場景中,點(diǎn)云數(shù)據(jù)可能受到光照、環(huán)境、傳感器等因素的影響,導(dǎo)致數(shù)據(jù)質(zhì)量下降或不確定性增加。因此,需要開發(fā)更加魯棒的標(biāo)注算法和模型,以應(yīng)對(duì)實(shí)際應(yīng)用中的挑戰(zhàn)。
其次,點(diǎn)云標(biāo)注的效率和準(zhǔn)確性需要進(jìn)一步提高。在實(shí)際應(yīng)用中,自動(dòng)駕駛汽車需要處理大量的點(diǎn)云數(shù)據(jù)和實(shí)時(shí)感知需求,因此需要高效的標(biāo)注算法和計(jì)算資源來滿足實(shí)時(shí)性和準(zhǔn)確性要求。此外,對(duì)于大規(guī)模的標(biāo)注任務(wù),需要開發(fā)更加自動(dòng)化和智能化的工具來提高標(biāo)注效率和質(zhì)量。
數(shù)據(jù)堂自有數(shù)據(jù)集的“智能駕駛數(shù)據(jù)解決方案”中掌握著駕乘人群的行為數(shù)據(jù),不僅包含駕駛員行為標(biāo)注數(shù)據(jù)50種動(dòng)態(tài)手勢(shì)識(shí)別數(shù)據(jù),103282張駕駛員行為標(biāo)注數(shù)據(jù)等,還包1300萬組人機(jī)對(duì)話交互文本數(shù)據(jù),245小時(shí)車載環(huán)境普通話手機(jī)采集語音數(shù)據(jù)。不管是街景場景數(shù)據(jù),駕駛員行為數(shù)據(jù),還是車載語音數(shù)據(jù),數(shù)據(jù)堂基于Human-in-the-loop智能輔助標(biāo)注技術(shù)”和豐富的AI數(shù)據(jù)項(xiàng)目實(shí)施經(jīng)驗(yàn)及完善的項(xiàng)目管理流程,支持智能駕駛場景下駕駛艙內(nèi)、艙外的圖像、語音數(shù)據(jù)采集任務(wù),輔助智能駕駛技術(shù)在復(fù)雜多樣的環(huán)境下更好的感知實(shí)際道路、車輛位置和障礙物信息等,實(shí)時(shí)感知駕駛風(fēng)險(xiǎn),實(shí)現(xiàn)智能行車、自動(dòng)泊車等預(yù)定目標(biāo)。對(duì)于智能駕駛而言將是其他企業(yè)難以企及的優(yōu)勢(shì)。
最后,點(diǎn)云標(biāo)注與其他自動(dòng)駕駛技術(shù)的集成和協(xié)同需要進(jìn)一步優(yōu)化。自動(dòng)駕駛技術(shù)涉及多個(gè)領(lǐng)域的知識(shí)和技術(shù),如傳感器技術(shù)、感知與決策、控制與執(zhí)行等。因此,點(diǎn)云標(biāo)注需要與其他技術(shù)進(jìn)行有效的集成和協(xié)同,以實(shí)現(xiàn)完整的自動(dòng)駕駛功能。
總的來說,雖然點(diǎn)云標(biāo)注在自動(dòng)駕駛中面臨一些挑戰(zhàn),但隨著技術(shù)的不斷發(fā)展和優(yōu)化,相信這些問題將得到解決,并進(jìn)一步推動(dòng)自動(dòng)駕駛技術(shù)的發(fā)展和應(yīng)用
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763514 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14191瀏覽量
169461 -
汽車
+關(guān)注
關(guān)注
14文章
3794瀏覽量
39205
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛中常提的“點(diǎn)云”是個(gè)啥?

激光雷達(dá)在自動(dòng)駕駛領(lǐng)域中的優(yōu)勢(shì)

新能源車軟件單元測試深度解析:自動(dòng)駕駛系統(tǒng)視角
從自動(dòng)駕駛行業(yè),分析數(shù)據(jù)標(biāo)注在人工智能的重要性
以自動(dòng)駕駛角度解析數(shù)據(jù)標(biāo)注對(duì)于人工智能的重要性
標(biāo)貝數(shù)據(jù)標(biāo)注在智能駕駛訓(xùn)練中的落地案例

AI數(shù)據(jù)服務(wù)在智能駕駛訓(xùn)練中的應(yīng)用實(shí)例
淺析基于自動(dòng)駕駛的4D-bev標(biāo)注技術(shù)

一文聊聊自動(dòng)駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論