其性能,確保生產(chǎn)過(guò)程的穩(wěn)定性和可靠性。ZR執(zhí)行器廠家將深入探討影響ZR執(zhí)行器性能的關(guān)鍵因素,旨在幫助讀者更好地應(yīng)對(duì)這些挑戰(zhàn)。 1、我們應(yīng)關(guān)注ZR執(zhí)行器的機(jī)械部分。機(jī)械部分的設(shè)計(jì)和制造質(zhì)量對(duì)執(zhí)行器的性能具有決定性影響。高精度、耐磨和
2024-03-20 15:04:38 72
72 
ZR執(zhí)行器的抗干擾能力:穩(wěn)定運(yùn)行的關(guān)鍵-速程精密 在工業(yè)自動(dòng)化領(lǐng)域,ZR執(zhí)行器作為一種重要的終端設(shè)備,其性能的穩(wěn)定性對(duì)于整個(gè)自動(dòng)化系統(tǒng)的運(yùn)行至關(guān)重要。而抗干擾能力作為ZR執(zhí)行器穩(wěn)定運(yùn)行的關(guān)鍵因素之一
2024-03-15 18:00:12137 
,那么位置控制很容易超調(diào)和來(lái)回調(diào)整,速度調(diào)整不過(guò)來(lái),因此我只能做在臨近位置時(shí)候切換成電流環(huán),可還是無(wú)法做高精度位置控制,我想請(qǐng)問(wèn)一下問(wèn)題如何解決
2第二個(gè)問(wèn)題是,如何在MCSDK中添加第二個(gè)傳感器,如何在MCSDK增加位置控制并且使用絕對(duì)值編碼器計(jì)算位置信息
2024-03-12 07:25:09
在尋求增強(qiáng)邊緣智能的過(guò)程中,機(jī)電執(zhí)行器等物理邊緣設(shè)備需要更多智能,才能獲得更好的機(jī)器實(shí)時(shí)決策等優(yōu)勢(shì)。這些執(zhí)行器提供智能、有價(jià)值和豐富的傳感器式反饋。此類(lèi)邊緣設(shè)備是工業(yè)4.0及更高階段的關(guān)鍵。它們控制
2024-02-22 08:23:40265 
我想制作一款傳動(dòng)比為1:500的執(zhí)行器,需要在執(zhí)行器輸出端配置傳感器,實(shí)現(xiàn)執(zhí)行器輸出角度檢測(cè),防夾功能和push to run功能,目前需要選擇一款配合TLE9853芯片使用的傳感器,我主要有以下
2024-02-02 08:07:35
規(guī)則將導(dǎo)致較大的輸人電流溢出,降低或損害運(yùn)算放大器的性能。
規(guī)則1具體怎么分析,所謂的直流反饋有哪幾種形式,在積分電路
中反饋網(wǎng)絡(luò)輸出到輸入時(shí)的電阻又該如
何解釋?zhuān)吭诮涣鞣糯箅娐?b class="flag-6" style="color: red">該如
何解釋?zhuān)?/div>
2024-01-24 23:34:39
我遇到了一個(gè)現(xiàn)實(shí),請(qǐng)問(wèn)有什么可能導(dǎo)致這個(gè)問(wèn)題,該如何解決:
在配置 Hoodp-dam 的描述者之后,開(kāi)始了 DMA 數(shù)據(jù)轉(zhuǎn)送(數(shù)據(jù)從 RAM 到 SPI。硬觸發(fā),Grp.8 第 14 章)。中途
2024-01-19 07:54:48
拉斯維加斯國(guó)際會(huì)展中心正式開(kāi)幕,各類(lèi)前沿技術(shù)產(chǎn)品同場(chǎng)“競(jìng)技”,值得關(guān)注的是,以觸覺(jué)反饋執(zhí)行器為核心部件的業(yè)內(nèi)首款應(yīng)用于智能手機(jī)的觸覺(jué)固態(tài)按鈕驚艷亮相,重
2024-01-11 08:00:30234 
單片機(jī)中的for語(yǔ)句是一種常見(jiàn)的循環(huán)控制結(jié)構(gòu),用于重復(fù)執(zhí)行一段代碼塊,可以簡(jiǎn)化程序的編寫(xiě)和減少代碼量。本文將詳細(xì)介紹單片機(jī)中for語(yǔ)句的運(yùn)用。 一、for語(yǔ)句的基本結(jié)構(gòu)和功能 for語(yǔ)句是一種迭代
2024-01-05 14:02:03347 測(cè)試發(fā)現(xiàn)ADE7753頻率越高,讀到的電壓寄存器的AD就越低,請(qǐng)問(wèn)這個(gè)該如何解決?測(cè)試電阻使用電阻降壓后接入的
2023-12-27 08:08:07
使用AD9656評(píng)估板時(shí)數(shù)據(jù)取出來(lái)全部是0,各種檢查之后發(fā)現(xiàn)寄存器0x0A的值為0,數(shù)據(jù)手冊(cè)中解釋0x0A的bit7表示PLL鎖定狀態(tài),
此板為未鎖定;bit0為JTX鏈路狀態(tài),此板為未就緒。硬件上好像沒(méi)有跟PLL有關(guān)的引腳。且供電正常。
請(qǐng)問(wèn)是哪里出了問(wèn)題?該如何解決?
2023-12-15 07:18:57
印刷錫膏時(shí)出現(xiàn)少錫的問(wèn)題該如何解決?
2023-12-11 09:38:56570 
在工業(yè)自動(dòng)化領(lǐng)域,Modbus和CANopen協(xié)議都是非常常見(jiàn)的通信協(xié)議。Modbus是一種串行通信協(xié)議,常用于連接PLC和傳感器/執(zhí)行器。而CANopen是一種基于CAN總線的應(yīng)用層協(xié)議,廣泛應(yīng)用
2023-12-08 17:02:59
按照數(shù)據(jù)手冊(cè)上的說(shuō)明,DOS失配閾值寄存器(0x8A)可設(shè)置為0V至4.82V,我的問(wèn)題是該寄存器設(shè)置大小和速度/位置采樣精度有關(guān)系嗎?如何評(píng)估該值設(shè)置對(duì)采樣精度的影響?
問(wèn)題背景:
我在
2023-12-06 08:27:28
軟件在運(yùn)行中,會(huì)定時(shí)執(zhí)行setObsRxPathSource OBS_RX1_TXLO命令。實(shí)測(cè)發(fā)現(xiàn),每1秒鐘執(zhí)行1次該指令,大約半小時(shí)后,出現(xiàn)arm mailbox busy現(xiàn)象。215
2023-12-06 06:23:41
是驅(qū)動(dòng)的問(wèn)題,在設(shè)備管理器中更新驅(qū)動(dòng)程序軟件顯示找不到設(shè)備的驅(qū)動(dòng)程序文件,該如何解決,或者在哪下驅(qū)動(dòng)呢?
2023-12-05 06:16:56
您好!當(dāng)我使用ADSP-21489的fir加速器時(shí),存在很大的噪音,未知如何解決,希望這里有高人幫我解決。
附件上有工程,該工程參考iir加速器使用例子編寫(xiě)。
2023-11-30 07:49:32
在Python中,可以使用一些技術(shù)來(lái)確保程序執(zhí)行完畢后再執(zhí)行其他任務(wù)。下面將詳細(xì)介紹幾種方法。 一、使用阻塞方式執(zhí)行程序 阻塞方式是最簡(jiǎn)單的方法之一,它要求程序在執(zhí)行完畢后再執(zhí)行后續(xù)任務(wù)。可以通過(guò)
2023-11-29 15:09:17999 如何解決車(chē)載部品測(cè)試過(guò)程中峰值電流不足的問(wèn)題? 隨著汽車(chē)電子系統(tǒng)的不斷發(fā)展和普及,車(chē)載部品的測(cè)試過(guò)程變得更加復(fù)雜和嚴(yán)峻。其中一個(gè)常見(jiàn)的問(wèn)題是峰值電流不足。峰值電流不足可能導(dǎo)致測(cè)試結(jié)果不準(zhǔn)確、設(shè)備損壞
2023-11-23 10:33:05205 變頻器VF控制
磨削采用恒定線速度即使用頻率幾乎固定在200hz左右
在使用中發(fā)現(xiàn)經(jīng)常出現(xiàn)功率不足,過(guò)流問(wèn)題導(dǎo)致變頻器保護(hù)降低主軸轉(zhuǎn)速,檢測(cè)功率峰值在7kw
設(shè)置Vf曲線,提高200hz時(shí)的電壓
2023-11-23 06:06:19
電子發(fā)燒友網(wǎng)站提供《適用于電磁閥執(zhí)行器的穩(wěn)健閉環(huán)控制與監(jiān)測(cè)系統(tǒng).pdf》資料免費(fèi)下載
2023-11-22 11:03:02 0
0 13、如何解決直插差模電感的異響
2023-11-20 09:35:053 為了增強(qiáng)邊緣智能,機(jī)電執(zhí)行器需要智能和高度集成的驅(qū)動(dòng)器解決方案。這些智能邊緣設(shè)備融合了執(zhí)行器和傳感器功能,支持在機(jī)器層面更好地進(jìn)行實(shí)時(shí)決策,并向更高的控制層級(jí)、云或AI生產(chǎn)力解決方案提供原位反饋信息。本文討論了模擬和數(shù)字技術(shù)交匯之處——智能邊緣的智能驅(qū)動(dòng)器解決方案和技術(shù)。
2023-11-16 15:56:39440 驅(qū)動(dòng)程序。 是否正確? 為什么CDD 僅用于 MCAL 標(biāo)簽? LLD 也在 CDD 中執(zhí)行 ?
為什么 I2C LLD 驅(qū)動(dòng)器在標(biāo)簽“ 驅(qū)動(dòng)器” 上圖中沒(méi)有使用“ IP ” ?
如下圖所示,LLI(LLD)使用的是“_IP”。
2023-11-13 07:04:12
電壓波動(dòng)已經(jīng)成為軋機(jī)在軋制過(guò)程中經(jīng)常遇到的問(wèn)題,對(duì)軋機(jī)的工作穩(wěn)定性和精度也產(chǎn)生了不小的影響。那么,如何解決軋機(jī)在軋制時(shí)出現(xiàn)的電壓波動(dòng)問(wèn)題呢?
2023-11-06 11:36:53437 
執(zhí)行機(jī)構(gòu)是驅(qū)動(dòng)終端控制單元(閥門(mén),檔板等)的專(zhuān)用設(shè)備,廣泛應(yīng)用于電力、冶金、石油、化工、建材、城市供水、污水處理等行業(yè)
2023-10-30 15:12:360 復(fù)位輸出腳P1.6呈高電平,可以還需要一個(gè)反向電壓使風(fēng)門(mén)復(fù)位,怎么實(shí)現(xiàn)啊?可不可以用另外一個(gè)輸出腳P1.5后接一個(gè)反相器來(lái)實(shí)現(xiàn)?
2023-10-25 06:57:07
心率傳感器有哪些型號(hào)怎么使用精度怎么樣?
2023-10-17 07:01:21
Intrduction 大家好,今天這篇文章的主要內(nèi)容是講解以及使用一些myCobot 280 的配件,來(lái)了解這些末端執(zhí)行器都能夠完成哪些功能,從而幫助大家能夠正確的選擇一款適合的配件來(lái)進(jìn)行
2023-10-16 16:28:17444 
步進(jìn)電機(jī)在控制的過(guò)程中怎么提高控制的精度
2023-10-12 06:02:50
MCU中雙精度浮點(diǎn)數(shù)是用什么格式存儲(chǔ)的
2023-10-11 06:24:11
電子發(fā)燒友網(wǎng)站提供《基于P89C58的智能電動(dòng)執(zhí)行器的設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-10 10:57:211 STM8系列微控制器包括一個(gè)開(kāi)關(guān)電容型模數(shù)轉(zhuǎn)換器。這種ADC類(lèi)型使用SAR(逐次逼近寄存器)原理,
通過(guò)該方法在幾個(gè)步驟中執(zhí)行轉(zhuǎn)換。轉(zhuǎn)換步驟數(shù)為等于ADC轉(zhuǎn)換器中的位數(shù)。
2023-10-10 06:42:33
如何解決跨域問(wèn)題?首先我們需要知道什么是跨域,跨域指的是瀏覽器不能執(zhí)行其它網(wǎng)站的腳本,它是由瀏覽器的同源策略造成的,是瀏覽器對(duì)JavaScript 施加的安全限制。 1、同源策略 根據(jù)百度百科 同源
2023-10-09 16:07:41252 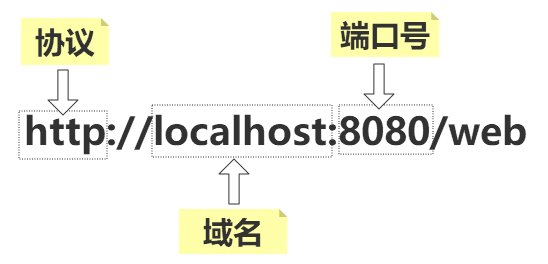
STM8的內(nèi)部溫度傳感器精度是多少的
2023-10-09 07:27:34
據(jù)麥姆斯咨詢(xún)報(bào)道,近期,MEMS技術(shù)領(lǐng)域的全球領(lǐng)導(dǎo)者Sheba Microsystems宣布推出一款革命性的MEMS自動(dòng)對(duì)焦執(zhí)行器新品,用于嵌入式視覺(jué)相機(jī)的主動(dòng)無(wú)熱化調(diào)焦,應(yīng)用領(lǐng)域涵蓋汽車(chē)、移動(dòng)機(jī)器人、無(wú)人機(jī)、安防與監(jiān)控等。
2023-10-07 09:55:38338 狀態(tài)機(jī)是由一系列的命令和條件組成的邏輯,執(zhí)行器按照這個(gè)邏輯和傳感器數(shù)據(jù)生成的周期一步一步執(zhí)行。命令:? 每個(gè)命令占8個(gè)比特,有時(shí)后面還有參數(shù)。? 當(dāng)執(zhí)行器執(zhí)行的到一個(gè)命令時(shí),指針會(huì)立刻指向下一個(gè)命令
2023-09-06 06:18:27
ST IO-Link從站執(zhí)行器設(shè)計(jì)方案
2023-09-05 08:01:54
電子發(fā)燒友網(wǎng)站提供《通過(guò)博通和希捷實(shí)現(xiàn)卓越的數(shù)據(jù)中心性能雙執(zhí)行器硬盤(pán)存儲(chǔ).pdf》資料免費(fèi)下載
2023-08-22 10:31:020 和偏心馬達(dá)的不同之處?超薄型Piezo(壓電)觸覺(jué)反饋設(shè)備 "PiezoHapt?執(zhí)行器"是使用了振動(dòng)的觸覺(jué)反饋技術(shù)及觸覺(jué)反饋等,擴(kuò)大了VR可運(yùn)用性的薄型振動(dòng)模塊 觸覺(jué)反饋技術(shù)(Haptics
2023-08-21 16:32:44563 
FPGA里。現(xiàn)在遇到的問(wèn)題是,在使用第三方調(diào)試器連接PC和開(kāi)發(fā)板時(shí)(相應(yīng)驅(qū)動(dòng)已經(jīng)安裝,調(diào)試器管腳連線也按照約束文件一一對(duì)應(yīng)),但是電腦上的設(shè)備管理器中沒(méi)有顯示“JTAG-DEBUGGER”(如圖,顯示converterA/B,按教程卸載設(shè)備和驅(qū)動(dòng)重裝后也是這樣)。請(qǐng)問(wèn)該如何解決?是因?yàn)檐浐艘浦膊怀晒幔?
2023-08-12 06:33:28
mslice超標(biāo)該如何解決?
2023-08-11 07:39:15
電子發(fā)燒友網(wǎng)站提供《IO-Link Master/IO Hub/IO-Link傳感器和執(zhí)行器解決方案.pdf》資料免費(fèi)下載
2023-08-01 11:26:007 電子發(fā)燒友網(wǎng)站提供《ST IO-Link從站執(zhí)行器設(shè)計(jì)方案.pdf》資料免費(fèi)下載
2023-07-29 11:00:261 如果你快速進(jìn)行百度搜索,你會(huì)發(fā)現(xiàn)很多不同的答案。分析響應(yīng)得出一個(gè)共同的主題——執(zhí)行器是一種使物體移動(dòng)或操作的設(shè)備。
2023-07-25 16:08:47326 
當(dāng)PLC供電不足時(shí),可以采取以下幾種方法來(lái)解決問(wèn)題: (1)檢查電源線路:首先,檢查PLC的電源線路是否正常連接,并確保電源線路沒(méi)有斷開(kāi)或損壞。檢查電源插頭和插座是否松動(dòng)或腐蝕,確保電源線路的穩(wěn)定
2023-07-25 08:15:011022 4G路由器無(wú)法上網(wǎng)時(shí)!該如何解決
2023-07-20 09:43:501329 
執(zhí)行器供電 汽車(chē)控制器通過(guò)控制信號(hào)和電能轉(zhuǎn)換等方式控制執(zhí)行器,實(shí)現(xiàn)對(duì)汽車(chē)各個(gè)系統(tǒng)的控制和調(diào)節(jié)。這些執(zhí)行器類(lèi)型主要有以下幾種: ·電機(jī)執(zhí)行器:用于控制汽車(chē)電機(jī)的運(yùn)行狀態(tài),如BLDC,PMSM,IM
2023-07-19 10:50:492247 
的基于銅電極的HAS(高有效堆疊)技術(shù),以無(wú)外殼封裝的被動(dòng)元件供貨,實(shí)現(xiàn)了良好的動(dòng)態(tài)范圍、高力量/體積比和納米級(jí)精度。比之其他技術(shù),TDK采用HAS技術(shù)的壓電執(zhí)行器性能更佳,濕度穩(wěn)定性更好、使用壽命更長(zhǎng)
2023-07-15 14:40:04299 的基于銅電極的HAS(高有效堆疊)技術(shù),以無(wú)外殼封裝的被動(dòng)元件供貨,實(shí)現(xiàn)了良好的動(dòng)態(tài)范圍、高力量/體積比和納米級(jí)精度。比之其他技術(shù),TDK采用HAS技術(shù)的壓電執(zhí)行器性能更佳,濕度穩(wěn)定性更好、使用壽命更長(zhǎng)。 兩款新元件覆蓋電壓范圍為-10至+180 V,額定位移在+160 V處達(dá)到,允許的表
2023-07-14 13:46:11283 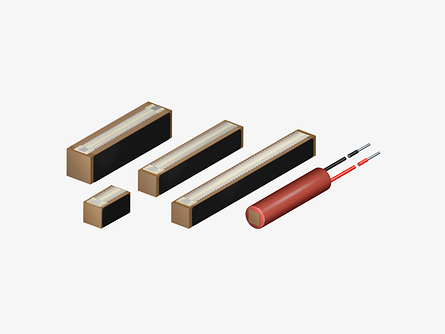
隨著現(xiàn)代工業(yè)網(wǎng)絡(luò)逐步支持先進(jìn)協(xié)議,工廠車(chē)間的傳感器實(shí)現(xiàn)遠(yuǎn)程實(shí)時(shí)監(jiān)控和配置成為可能,令生產(chǎn)停機(jī)時(shí)間大幅縮短。不過(guò),將傳感器和執(zhí)行器連接至安裝了進(jìn)程控制器的接線柜,卻仍是一項(xiàng)人工密集型工作,非常繁瑣。
2023-07-13 17:00:24352 
電子發(fā)燒友網(wǎng)站提供《智能設(shè)備控制的模塊化執(zhí)行器開(kāi)源項(xiàng)目.zip》資料免費(fèi)下載
2023-07-12 11:46:010 電子發(fā)燒友網(wǎng)站提供《BeagleBone Black Wireless、MotorCape和線性執(zhí)行器.zip》資料免費(fèi)下載
2023-07-05 10:34:320 為了保證伺服電動(dòng)機(jī)及步進(jìn)電動(dòng)機(jī)等控制用電動(dòng)機(jī)的優(yōu)異控制性能,組裝到電動(dòng)機(jī)中的減速機(jī)要求具備高轉(zhuǎn)矩/質(zhì)量比、強(qiáng)大的角度傳動(dòng)精度、低齒隙等特性。組裝有Harmonic Drive的執(zhí)行元件憑借其優(yōu)異性能,在不破壞電動(dòng)機(jī)控制性能的情況下能夠獲得高減速以及高分辨率。
2023-06-28 12:00:00389 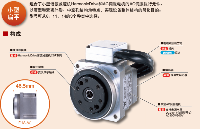
執(zhí)行器傳統(tǒng)上使用機(jī)械原理(氣動(dòng)、液壓)來(lái)打開(kāi)和關(guān)閉閥門(mén),但在許多應(yīng)用中,電控電機(jī)已經(jīng)取代了這些原理。盡管如此,執(zhí)行器將始終具有移動(dòng)部件。這些會(huì)產(chǎn)生摩擦,需要持續(xù)監(jiān)控和維護(hù),以防止可能導(dǎo)致生產(chǎn)意外停止
2023-06-27 11:25:46296 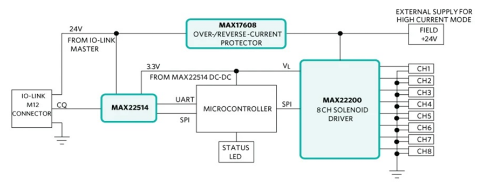
北方某客戶(hù)在CMP設(shè)備使用了哈默納科執(zhí)行器SHA、RSF、HMA和FHA系列產(chǎn)品,滿(mǎn)足了客戶(hù)對(duì)于提高控制精度,高速定位,緊湊安裝空間的需求。
2023-06-14 09:48:39327 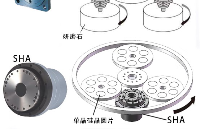
在我們用錫膏對(duì)雙面貼片進(jìn)行焊接時(shí),會(huì)出現(xiàn)掉件的問(wèn)題,這是什么原因?qū)е碌哪兀坑衷撊?b class="flag-6" style="color: red">何解決?下面佳金源SMT貼片錫膏廠家來(lái)講解一下:這種現(xiàn)象是由于錫膏熔化后焊料對(duì)元件的垂直固定力不足,主要原因
2023-06-02 16:00:22766 
執(zhí)行器是一種機(jī)電一體化的裝置,主要用于機(jī)械設(shè)備、工業(yè)自動(dòng)化等領(lǐng)域中,用于控制機(jī)械的運(yùn)動(dòng)、位置和力量等參數(shù),是自動(dòng)化控制系統(tǒng)中的重要組成部分。執(zhí)行器廣泛應(yīng)用于:機(jī)床、工業(yè)機(jī)器人、自動(dòng)化生產(chǎn)線、冶金、化工、塑料、制藥、食品、紡織、印刷、包裝、玻璃、木工、建筑、航空航天、軌道交通等各個(gè)領(lǐng)域。
2023-06-02 09:30:405228 納芯微推出全新三線制車(chē)規(guī)霍爾效應(yīng)開(kāi)關(guān)/鎖存器NSM101x系列,為數(shù)字位置檢測(cè)提供高精度的解決方案,可被廣泛應(yīng)用于汽車(chē)執(zhí)行器等的位置檢測(cè)。
2023-06-01 13:49:07541 RTC為整個(gè)電子系統(tǒng)提供時(shí)間基準(zhǔn),主控設(shè)計(jì)均離不開(kāi)RTC電路設(shè)計(jì),在應(yīng)用RTC時(shí),會(huì)出現(xiàn)精度或功耗大的現(xiàn)象,如何解決RTC精度及功耗問(wèn)題?本文將為您介紹時(shí)鐘芯片應(yīng)用問(wèn)題及解決方法。
2023-05-26 14:48:412891 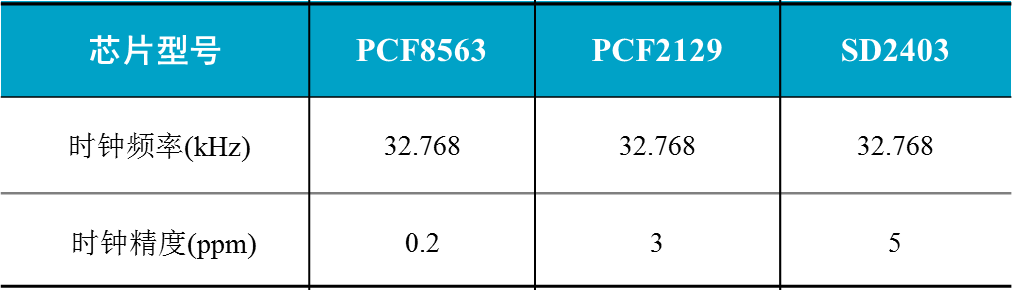
。有必要執(zhí)行項(xiàng)目遷移到更高版本。adc_swtrigger_s32k144 adc_swtrigger_s32k144 工具鏈版本問(wèn)題
我該如何解決這個(gè)問(wèn)題
2023-05-18 06:24:08
線性執(zhí)行器可將電機(jī)轉(zhuǎn)子固有的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為適用于各類(lèi)大小負(fù)載的直線運(yùn)動(dòng)。它由電機(jī)、直線導(dǎo)軌和驅(qū)動(dòng)控制電子元件組成,此外還可能包含有線/無(wú)線連接和控制方案。雖然線性執(zhí)行器對(duì)用戶(hù)的存在感很低,但它是廣泛
2023-05-17 09:41:38366 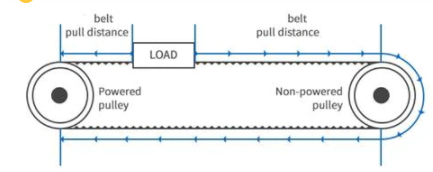
不足的帶寬來(lái)證實(shí)這一點(diǎn)。但是我找不到任何方法或注冊(cè)來(lái)降低 PCIe 傳輸優(yōu)先級(jí)。我想我也可以在監(jiān)視 LFIFO 狀態(tài)的內(nèi)核線程中按需執(zhí)行此操作。但是我在文檔中找不到任何可以調(diào)節(jié) PCIe 主訪問(wèn)優(yōu)先級(jí)
2023-05-17 07:13:15
,5口(-)6 口(+)和3、4電源連接并工作。
一個(gè)繼電器對(duì)應(yīng)一個(gè)執(zhí)行器設(shè)備,執(zhí)行器正負(fù)極連接繼電器,繼電器連接好正負(fù)級(jí)后7口接出控制信號(hào)到數(shù)字量采集器-4150對(duì)應(yīng)執(zhí)行器通道D00-D07。
備注:三色燈、電動(dòng)推桿的繼電器布線以及全部其他設(shè)備布線,實(shí)際安裝布線請(qǐng)看物
2023-04-26 11:13:050 L5.4.47_2.2.0 中的 Tensorflow Lite 2.2.0 NNAPI 內(nèi)存不足
2023-04-21 06:38:37
使用 PUF 指紋加密用戶(hù)密鑰。現(xiàn)在加密后的用戶(hù)程序存放在Flash中。只有該板可以在通電時(shí)對(duì)其進(jìn)行解密(防篡改和代碼保密)。 對(duì)于部署階段:1. 給板子上電并恢復(fù) PUF 指紋。2. 使用 PUF
2023-04-20 08:31:37
【主要特性】 減速器采用中空超扁平設(shè)計(jì),結(jié)構(gòu)更緊湊,整機(jī)更小巧,執(zhí)行器自重更輕<1.5kg執(zhí)行器根據(jù)實(shí)際需求定制安裝抱閘
2023-04-19 10:40:37
,時(shí)間從13:48:00開(kāi)始計(jì)時(shí)。2、比方說(shuō)當(dāng)前時(shí)間是13:48:30,斷電后等1分鐘,再上電。時(shí)間理論應(yīng)該是13:49:30開(kāi)始,實(shí)際卻是13:49:00開(kāi)始。也就是說(shuō),秒寄存器沒(méi)有自動(dòng)運(yùn)行。請(qǐng)問(wèn)這個(gè)問(wèn)題該如何解決?謝謝各位大蝦指點(diǎn)……
2023-04-19 10:39:08
【主要特性】 減速器采用中空超扁平設(shè)計(jì),結(jié)構(gòu)更緊湊,整機(jī)更小巧,執(zhí)行器自重更輕<1.5kg執(zhí)行器根據(jù)實(shí)際需求定制安裝抱閘
2023-04-17 18:01:33
現(xiàn)象:RTT長(zhǎng)時(shí)間運(yùn)行后,不斷開(kāi)關(guān)的線程資源無(wú)法得到回收,比f(wàn)insh組件低優(yōu)先級(jí)的線程得不到運(yùn)行,最終導(dǎo)致內(nèi)存不足。但是!!!高優(yōu)先級(jí)的幾個(gè)線程一直可以運(yùn)行。會(huì)是同優(yōu)先級(jí)的線程數(shù)量過(guò)多,導(dǎo)致比該優(yōu)先級(jí)的低的線程不能運(yùn)行嗎
2023-04-14 11:26:53
尼得科傳動(dòng)技術(shù)株式會(huì)社(舊:日本電產(chǎn)新寶株式會(huì)社)推出了一款將電機(jī)組裝進(jìn)精密控制用減速機(jī)“FLEXWAVE”的超扁平執(zhí)行器。 隨著少子老齡化進(jìn)程的加快,動(dòng)力輔助服的市場(chǎng)需求越來(lái)越大,以輔助重體力勞動(dòng)
2023-04-13 15:50:04519 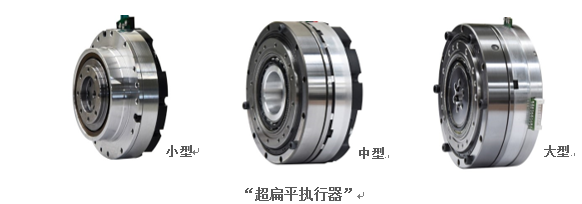
尼得科傳動(dòng)技術(shù)株式會(huì)社(舊日本電產(chǎn)新寶株式會(huì)社)推出了一款將電機(jī)組裝進(jìn)精密控制用減速機(jī)“FLEXWAVE”的超扁平執(zhí)行器。
2023-04-12 15:57:34352 
PLC定時(shí)器精度和什么因素有關(guān)系?在一段程序中定時(shí)器用的越多精度越差嗎,為什么?PLC中的定時(shí)器是通過(guò)程序構(gòu)造的,100個(gè)定時(shí)器可能就是用一個(gè)硬件定時(shí)器加上軟件程序構(gòu)造的,請(qǐng)高人分析一下
2023-04-12 14:17:18
LineEdit 時(shí),我得到“qt.qpa.wayland:xkbcommon 在此版本上不可用,不執(zhí)行鍵映射”有人知道如何解決這個(gè)問(wèn)題嗎?
2023-04-11 07:27:16
智慧用電似乎已經(jīng)成為我們生活中不可或缺的一部分,一系列煩惱也接踵而至,其中最常見(jiàn)的就是安裝智慧用電探測(cè)器信號(hào)不好。 遇到這種情況該如何解決?3個(gè)簡(jiǎn)單實(shí)用的方法,讓你輕松解決智慧用電探測(cè)器沒(méi)有
2023-04-10 09:49:50
(OS_SECOND_CORE,&setValue)啟動(dòng)從核。也可以編譯通過(guò)。但是將生成的elf文件燒錄到[DEVKIT-MPC5748G]中,進(jìn)入StartCore函數(shù)后,發(fā)現(xiàn)slave core沒(méi)有啟動(dòng)。請(qǐng)問(wèn)如何解決這個(gè)問(wèn)題?
2023-04-10 07:43:39
無(wú)論是酷暑還是寒冬,利用汽車(chē)加熱冷卻系統(tǒng),乘客始終可以享受到舒適的車(chē)內(nèi)環(huán)境。在不同類(lèi)別的車(chē)輛中,這些暖通空調(diào)(HVAC)系統(tǒng)的復(fù)雜性和自動(dòng)化程度也各不相同。經(jīng)濟(jì)型汽車(chē)可能需要駕駛員手動(dòng)旋轉(zhuǎn)旋鈕來(lái)控制溫度,而在高端車(chē)輛中,則可以通過(guò)傳感器同時(shí)自動(dòng)控制車(chē)內(nèi)的溫度以及空氣的濕度和質(zhì)量。
2023-04-07 09:21:231415 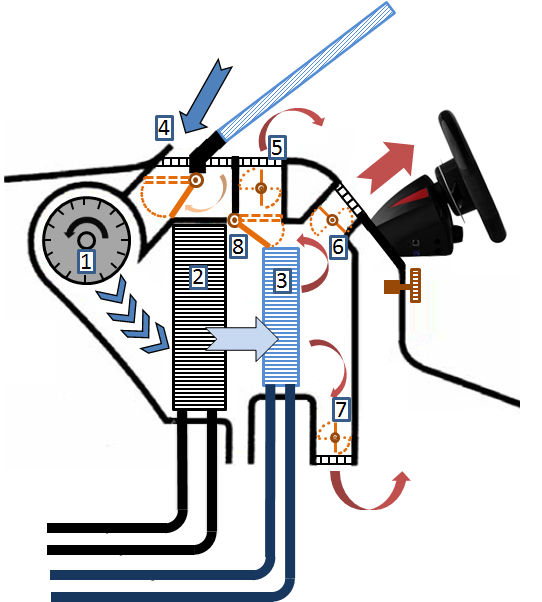
誤差成比例的信號(hào)移動(dòng)線性致動(dòng)器來(lái)補(bǔ)償電流誤差。比例項(xiàng)用于使當(dāng)前位置接近目標(biāo)是有意義的,因?yàn)?b class="flag-6" style="color: red">該誤差是執(zhí)行器的設(shè)定位置與其當(dāng)前位置之間的差異。比例項(xiàng)使控制函數(shù)尋求將其減少到零。 在調(diào)整的第一步中,我們將
2023-04-04 15:11:34
受工業(yè)機(jī)器人發(fā)展帶動(dòng),末端執(zhí)行器行業(yè),特別是夾爪市場(chǎng),已成為廣受關(guān)注的領(lǐng)域。據(jù)推算,全球制造業(yè)每年消耗超過(guò)3000萬(wàn)個(gè)模塊化夾爪,而氣動(dòng)夾爪市場(chǎng)規(guī)模已達(dá)到百億元級(jí)別。
2023-04-04 10:29:16299 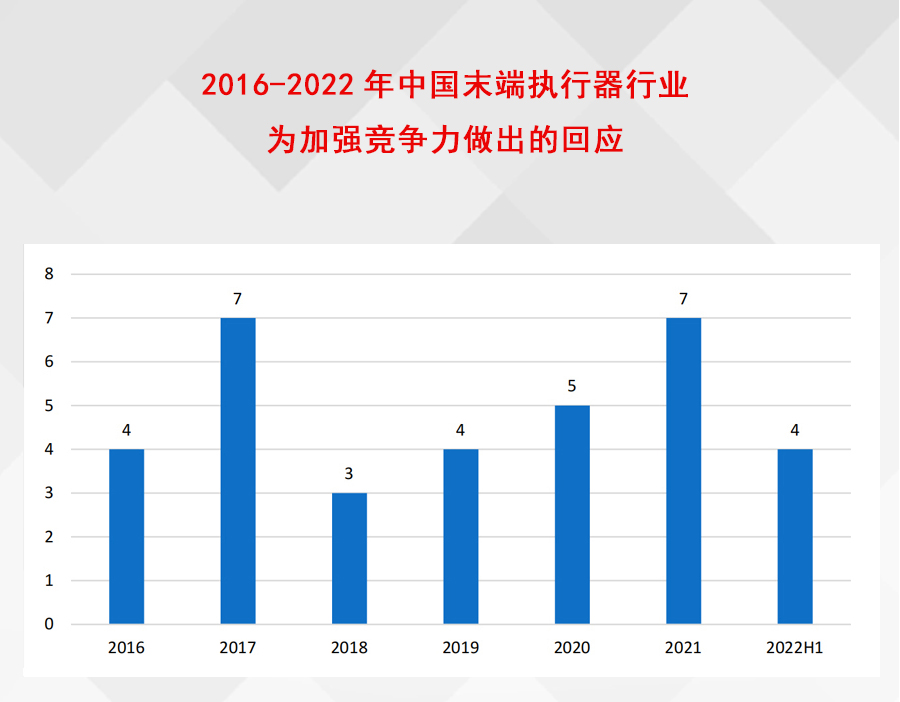
無(wú)論在酷暑還是寒冬,乘客始終可以通過(guò)汽車(chē)的加熱和制冷系統(tǒng)享受到舒適的車(chē)內(nèi)環(huán)境。在不同類(lèi)別的車(chē)輛中,這些暖通空調(diào)(HVAC)系統(tǒng)的復(fù)雜性和自動(dòng)化程度也各不相同。經(jīng)濟(jì)型汽車(chē)可能需要駕駛員手動(dòng)旋轉(zhuǎn)旋鈕來(lái)控制溫度,而在高端車(chē)輛中,則可以通過(guò)傳感器同時(shí)自動(dòng)控制車(chē)內(nèi)的溫度以及空氣的濕度和質(zhì)量。
2023-03-30 09:27:372827 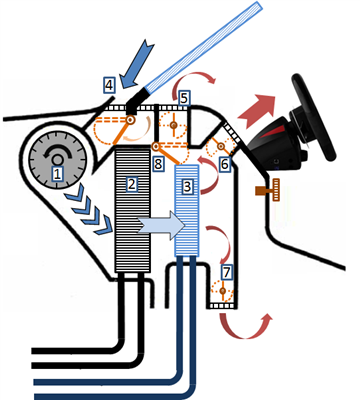
存在于其他 3 個(gè) gcc 目錄中。我檢查了唯一兼容的編譯器是 gcc 的 3 個(gè)版本。我該如何解決這個(gè)問(wèn)題?
2023-03-30 07:37:03
在RT-Thread Studio中執(zhí)行【從MDK同步到RT-Studio】出現(xiàn)如下錯(cuò)誤[1660] Failed to execute script mainTraceback (most
2023-03-29 15:37:50
電動(dòng)執(zhí)行器定位控制在生產(chǎn)生活中具有廣泛的應(yīng)用,在使用搭載步進(jìn)電機(jī)的電動(dòng)執(zhí)行器進(jìn)行定位控制的時(shí)候,定位系統(tǒng)的定位精度和響應(yīng)波形,會(huì)隨著負(fù)載質(zhì)量的變化而變化,這是由電動(dòng)執(zhí)行器核心部 件步進(jìn)電機(jī)本身特性
2023-03-23 11:34:161 PWM 寄存器未出現(xiàn)在 imxrt1024 處理器項(xiàng)目的寫(xiě)入寄存器塊中。它總是顯示與 ADC 相關(guān)的寄存器。難道我做錯(cuò)了什么?我該如何解決?我也找不到這些處理器的寫(xiě)/讀寄存器塊示例。
2023-03-23 08:45:54
帶增壓調(diào)節(jié)器的壓電微執(zhí)行器驅(qū)動(dòng)器 TSOT23-8 2.5~16V 2mA
2023-03-23 05:01:59
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論