本篇文章我們主要介紹正運(yùn)動(dòng)技術(shù)動(dòng)態(tài)鏈接庫(kù)環(huán)境配置以及EtherCAT運(yùn)動(dòng)控制器在ROS下的單軸運(yùn)動(dòng)。
2024-03-17 11:11:13 377
377 
本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-17 11:06:06452 
組成數(shù)控系統(tǒng)的關(guān)鍵部件——實(shí)時(shí)操作系統(tǒng),是一系列關(guān)鍵技術(shù)中的關(guān)鍵。當(dāng)前國(guó)產(chǎn)數(shù)控系統(tǒng)的方案幾乎都采用國(guó)外的實(shí)時(shí)操作系統(tǒng),一些是采用Windows+國(guó)外實(shí)時(shí)操作系統(tǒng)的方案,能夠在一定程度上降低開發(fā)
2024-03-15 09:42:5864 
TMCM-1290是一款4-36V供電的智能集成步進(jìn)電機(jī)驅(qū)動(dòng)器+控制器模塊,它融合了步進(jìn)電機(jī)的運(yùn)動(dòng)控制和驅(qū)動(dòng)功能,為現(xiàn)代工業(yè)應(yīng)用提供了高效、可靠的解決方案。以下是關(guān)于TMCM-1290的詳細(xì)介紹
2024-03-10 20:44:08
實(shí)時(shí)高性能需求尤其突出。面對(duì)以上挑戰(zhàn),合作伙伴翌控科技基于米爾STM32MP135開發(fā)板發(fā)布開放式高實(shí)時(shí)高性能PLC控制器解決方案,將高精準(zhǔn)數(shù)據(jù)采集、預(yù)處理、存儲(chǔ)、通信與高實(shí)時(shí)控制融為一體,為控制系統(tǒng)
2024-03-07 20:06:14
本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-06 11:47:51627 
數(shù)控編程中,G代碼(也稱為指令代碼)是一種用于控制數(shù)控機(jī)床運(yùn)動(dòng)、輔助功能和工作過程的指令。在數(shù)控編程中,通過一系列的G代碼指令的組合和排列,可以實(shí)現(xiàn)機(jī)床各種復(fù)雜的加工操作。本文將為您詳細(xì)介紹數(shù)控編程
2024-02-14 15:51:00691 調(diào)用同一套API函數(shù)庫(kù),易與現(xiàn)有的工業(yè)控制系統(tǒng)集成,極大地提高了工程師進(jìn)行二次開發(fā)的效率,加速設(shè)備的部署和應(yīng)用。PCIE464產(chǎn)品硬件性能特點(diǎn)
(1)可選6-64軸運(yùn)動(dòng)控制,支持EtherCAT總線/脈沖
2024-01-24 09:48:21
加減速控制是CNC 系統(tǒng)的關(guān)鍵技術(shù)之一,也是實(shí)現(xiàn)數(shù)控系統(tǒng)高實(shí)時(shí)性的瓶頸。在CNC裝置中,為了保證機(jī)床在啟動(dòng)或停止時(shí)不產(chǎn)生沖擊、失步、超程或振蕩,必須對(duì)進(jìn)給電機(jī)的脈沖頻率或電壓進(jìn)行加減速控制。
2024-01-19 15:02:35106 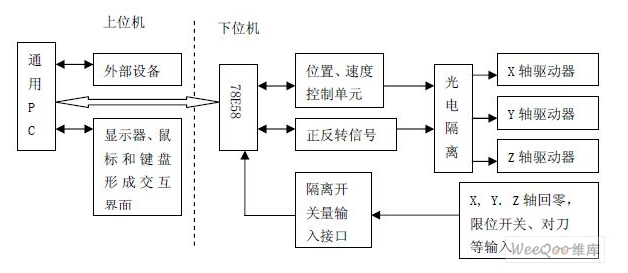
基于 PC 總線的控制器以DSP 作為處理器,以PC 機(jī)作為信息處理、人機(jī)交互和聯(lián)網(wǎng)通信平臺(tái),運(yùn)動(dòng)控制器以插卡形式嵌入PC 機(jī),即“PC+運(yùn)動(dòng)控制器”的模式。
2024-01-19 14:43:34122 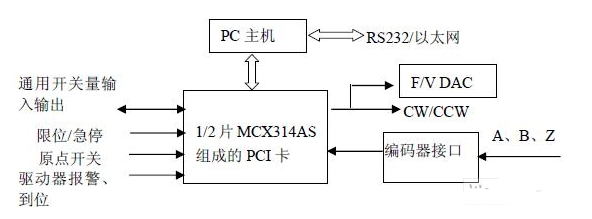
安川運(yùn)動(dòng)控制器具有高精度、快速響應(yīng)和穩(wěn)定可靠的優(yōu)勢(shì),支持多種控制模式和傳感器配合,提供實(shí)時(shí)監(jiān)控和精確調(diào)整功能。北成新控以核心控制器為平臺(tái),為不同客戶提供專用控制系統(tǒng),助力企業(yè)數(shù)智化轉(zhuǎn)型。
2024-01-11 11:00:05108 
SuperCAT是凌華科技打造的基于軟件控制的EtherCAT運(yùn)動(dòng)控制器,其核心的控制軟件來(lái)自于凌華二十多年運(yùn)動(dòng)控制經(jīng)驗(yàn)的積累,整合了凌華脈沖卡和EtherCAT總線卡的所有功能,系統(tǒng)通訊周期相比硬件的EtherCAT總線卡得到了大幅提升,同時(shí)可以滿足更多軸數(shù)的應(yīng)用需求。
2024-01-09 11:57:44259 
PLC控制網(wǎng)關(guān)的功能特點(diǎn)? PLC控制網(wǎng)關(guān)是一種連接PLC (可編程邏輯控制器) 和網(wǎng)絡(luò)的設(shè)備,用于實(shí)現(xiàn)遠(yuǎn)程監(jiān)控、遠(yuǎn)程控制和數(shù)據(jù)傳輸?shù)?b class="flag-6" style="color: red">功能。PLC控制網(wǎng)關(guān)具有多種功能特點(diǎn),下面將詳細(xì)介紹其主要特點(diǎn)
2023-12-25 15:12:38247 環(huán)境中,對(duì)機(jī)器人進(jìn)行了正逆運(yùn)動(dòng)學(xué)仿真測(cè)試。接著,對(duì)單軸和多軸伺服系統(tǒng)進(jìn)行了控制測(cè)試,最終實(shí)現(xiàn)了機(jī)器人的軌跡規(guī)劃實(shí)體控制。
在整個(gè)項(xiàng)目中,LabVIEW的功能被充分利用,特別是在算法實(shí)現(xiàn)、數(shù)據(jù)處理方面
2023-12-21 20:03:18
。利用EtherCAT技術(shù)的優(yōu)異性能,可以實(shí)現(xiàn)用傳統(tǒng)現(xiàn)場(chǎng)總線系統(tǒng)所無(wú)法實(shí)現(xiàn)的控制方法。
正運(yùn)動(dòng)技術(shù)的ZMC464運(yùn)動(dòng)控制器,實(shí)際測(cè)試過100us可以帶16軸EtherCAT伺服運(yùn)行,500us可以帶
2023-12-13 11:37:40
西門子 840D 數(shù)控系統(tǒng)在制造企業(yè)中的應(yīng)用較為廣泛,該系統(tǒng)主要分為數(shù)控與驅(qū)動(dòng)系統(tǒng)及人機(jī)界面兩部分,系統(tǒng)的正常運(yùn)行需要這兩部分的協(xié)調(diào)配合。在實(shí)際生產(chǎn)過程中,該系統(tǒng)具備穩(wěn)定
2023-12-07 10:49:42653 ;
③使能完成設(shè)置基本運(yùn)動(dòng)參數(shù)ATYPE、UNITS、SPEED、ACCEL、FWD_IN、REV_IN等軸參數(shù),再發(fā)送運(yùn)動(dòng)指令便可驅(qū)動(dòng)電機(jī);4. 設(shè)置完成后即可建立通訊,通訊成功“控制器狀態(tài)”-“槽
2023-12-05 09:29:57
新代數(shù)控系統(tǒng)維修注意事項(xiàng)
2023-11-23 16:27:07403 了解一下西門子840D數(shù)控系統(tǒng)故障維修與診斷方法
2023-11-23 10:46:361394 嚴(yán)格來(lái)講,編碼器只會(huì)告訴你改如何定位,要如何執(zhí)行,是需要靠數(shù)控系統(tǒng)(或者PLC或運(yùn)動(dòng)控制器之類控制器)控制伺服或者步進(jìn)電機(jī)來(lái)實(shí)現(xiàn)定位的,編碼器好比人的眼睛,知道電機(jī)軸或者負(fù)載處于當(dāng)前某個(gè)位置,工業(yè)
2023-11-13 08:07:17868 
請(qǐng)問我要測(cè)xy軸方向的運(yùn)動(dòng)用什么傳感器 只測(cè)一個(gè)平面
2023-11-10 06:09:27
你們正點(diǎn)原子的mini四軸飛行器的控制器是多少位的
2023-11-08 07:40:08
、用戶多任務(wù)程序。運(yùn)動(dòng)控制器支持多任務(wù)編程,各任務(wù)可以獨(dú)立執(zhí)行,任務(wù)間不受影響。通過劃分任務(wù),程序模塊化,簡(jiǎn)化錯(cuò)誤處理,提高系統(tǒng)靈活性和響應(yīng)能力。這種方法在3C電子、印刷包裝、機(jī)器人等領(lǐng)域的運(yùn)動(dòng)控制中具有
2023-11-07 09:52:36
今天,正運(yùn)動(dòng)小助手給大家分享一下全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H如何使用Python+QT實(shí)現(xiàn)連續(xù)軌跡加工。 01 功能簡(jiǎn)介 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器
2023-11-06 16:03:52278 
鏡運(yùn)動(dòng)控制器是正運(yùn)動(dòng)技術(shù)推出的高性能總線雙振鏡運(yùn)動(dòng)控制器,專為工業(yè)激光+振鏡+運(yùn)動(dòng)控制方面的應(yīng)用而設(shè)計(jì),通過EtherCAT總線和脈沖軸接口能實(shí)現(xiàn)多軸運(yùn)動(dòng)控制。
ZMC408SCAN總線控制器支持
2023-11-06 10:30:40
手冊(cè)及例程源碼。以下為各個(gè)功能部分API指令一覽表;1、控制器連接
2、控制器信息獲取
3、基本軸參數(shù)設(shè)置
4、基本運(yùn)動(dòng)控制
5、VR寄存器
6、Table寄存器7、Modbus寄存器
8
2023-10-26 15:11:35
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來(lái)講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52814 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-10-22 10:51:57459 
數(shù)控系統(tǒng)參數(shù)是數(shù)控機(jī)床的靈魂,數(shù)控機(jī)床軟硬件功能的正常發(fā)揮是通過參數(shù)來(lái)設(shè)定的。機(jī)床的制造精度和維修后的精度恢復(fù)也需要通過參數(shù)來(lái)調(diào)整,所以數(shù)控機(jī)床沒有參數(shù)等于是一堆廢鐵。數(shù)控機(jī)由于數(shù)控系統(tǒng)參數(shù)全部丟失
2023-10-21 09:27:18747 電子發(fā)燒友網(wǎng)站提供《16位單片機(jī)數(shù)控系統(tǒng)對(duì)普通車床進(jìn)給系統(tǒng)進(jìn)行改造設(shè)計(jì)方案.pdf》資料免費(fèi)下載
2023-10-19 10:11:10 0
0 電子發(fā)燒友網(wǎng)站提供《基于數(shù)控系統(tǒng)單片機(jī)測(cè)控技術(shù)應(yīng)用與實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-18 11:14:481 FANUC是當(dāng)今世界上數(shù)控系統(tǒng)科研、設(shè)計(jì)、制造、銷售實(shí)力最強(qiáng)大的企業(yè),在規(guī)格系列上是當(dāng)今世界上最完整的,并基于其強(qiáng)大的科研實(shí)力和嚴(yán)密步驟,努力不斷開發(fā)高端商品,牢牢占據(jù)了國(guó)內(nèi)中端數(shù)控機(jī)床市場(chǎng)的絕大多數(shù)的份額。
2023-10-17 10:18:001886 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-10-16 09:49:53422 
電子發(fā)燒友網(wǎng)站提供《基于ARMS和FPGA的嵌入式數(shù)控系統(tǒng)設(shè)計(jì)原理.pdf》資料免費(fèi)下載
2023-10-10 09:33:472 點(diǎn)位運(yùn)動(dòng)控制:即僅對(duì)終點(diǎn)位置有要求,與運(yùn)動(dòng)的中間過程即運(yùn)動(dòng)軌跡無(wú)關(guān)。相應(yīng)的運(yùn)動(dòng)控制器要求具有快速的定位速度,在運(yùn)動(dòng)的加速段和減速段,采用不同的加減速控制策略。
2023-10-09 17:10:10556 早期的運(yùn)動(dòng)控制技術(shù)主要是伴隨著數(shù)控技術(shù)、機(jī)器人技術(shù)和工廠自動(dòng)化技術(shù)的發(fā)展而發(fā)展的。早期的運(yùn)動(dòng)控制器實(shí)際上是可以獨(dú)立運(yùn)行的專用的控制器,往往無(wú)需另外的處理器和操作系統(tǒng)支持,可以獨(dú)立完成運(yùn)動(dòng)控制功能、工藝技術(shù)要求的其他功能和人機(jī)交互功能。
2023-10-09 16:43:18252 
全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器的軸參數(shù)設(shè)置與單軸運(yùn)動(dòng)例程講解。
2023-09-27 15:42:26353 
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如何編寫運(yùn)動(dòng)控制卡的功能函數(shù)庫(kù)。
2023-09-26 08:14:08
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停。
2023-09-21 16:26:411760 
運(yùn)動(dòng)控制器是一種電子設(shè)備,通常與運(yùn)動(dòng)控制軟件配合使用,用于控制機(jī)器人、數(shù)控機(jī)床和其他自動(dòng)化設(shè)備移動(dòng)或執(zhí)行各種任務(wù)。運(yùn)動(dòng)控制器主要由一臺(tái)計(jì)算機(jī)和相關(guān)的硬件組成,如數(shù)字信號(hào)處理器(DSP)和模擬/數(shù)字
2023-09-21 08:08:39470 應(yīng)用中占據(jù)主導(dǎo)地位。PLC具有可編程性、靈活性、穩(wěn)定性和可靠性等特點(diǎn),適用于各種簡(jiǎn)單至中等復(fù)雜度的運(yùn)動(dòng)控制應(yīng)用,如中小型制造和過程控制應(yīng)用中。 專用控制器是針對(duì)特定應(yīng)用設(shè)計(jì)的控制器。它們通常具有高度優(yōu)化的算法和特性,以適應(yīng)特定的控制任務(wù)。專用控制器在某些特定應(yīng)
2023-09-19 09:58:30443 
自主設(shè)計(jì) 了一種雙核四軸運(yùn)動(dòng)控制器 。該 運(yùn)動(dòng)控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
集運(yùn)動(dòng)控制器、機(jī)器人控制系統(tǒng)和六軸伺服驅(qū)動(dòng)于一體
? 體積小、功率密度高、集成度高,適合20KG以下機(jī)器人 ? 采用多自由度和非線性控制算法,實(shí)現(xiàn)高動(dòng)態(tài)響應(yīng)、高精度的電流、速度及位置控制? 支持
2023-09-07 07:57:07
上節(jié)課程我們介紹了全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H的硬件接口與功能,本節(jié)課程我們主要講解一下正運(yùn)動(dòng)API函數(shù)封裝原理以及自定義API封裝例程。
2023-08-28 15:08:19660 
在功能、性能上已經(jīng)非常接近了。只是形式上它們大多數(shù)仍然保留了原有的特征,即:運(yùn)動(dòng)控制器主要面向運(yùn)動(dòng)控制系統(tǒng),伺服軸(運(yùn)動(dòng)軸)是它的主要控制對(duì)象;PLC主要面向邏輯控
2023-08-08 08:09:46820 “現(xiàn)在 PLC 的運(yùn)動(dòng)控制功能越來(lái)越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的 PLC 的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?”
2023-08-06 09:30:011203 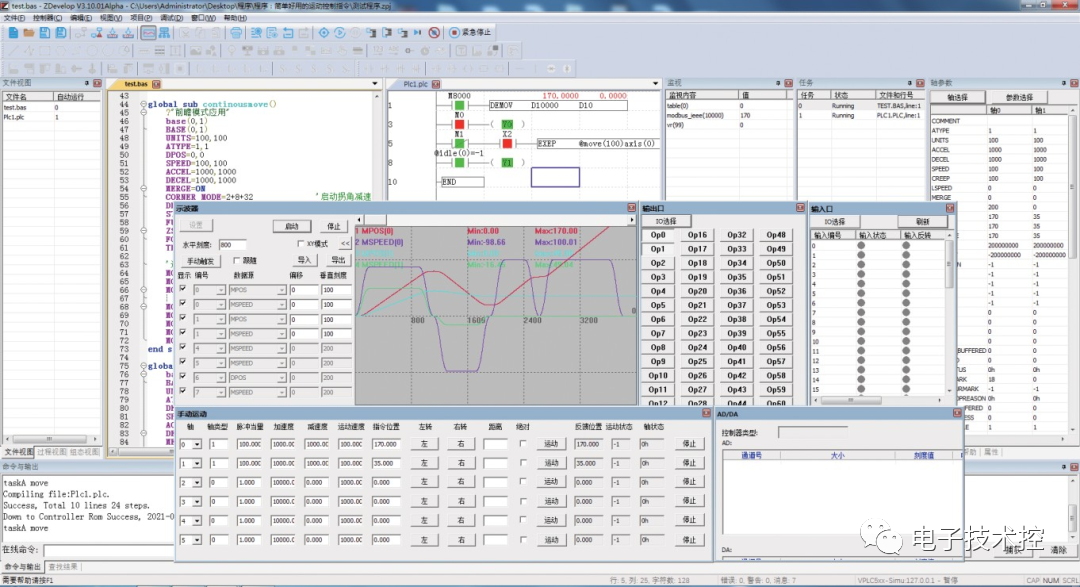
的發(fā)展,工業(yè)機(jī)器人應(yīng)用越來(lái)越廣泛,PLC也不再是簡(jiǎn)單的可編程邏輯控制器,各個(gè)品牌廠家都推出了自己的運(yùn)動(dòng)控制型PLC,來(lái)實(shí)現(xiàn)一些運(yùn)動(dòng)控制功能,與此同時(shí),運(yùn)動(dòng)控制卡及運(yùn)
2023-08-04 08:09:121072 運(yùn)動(dòng)控制器是一種電子設(shè)備,通常與運(yùn)動(dòng)控制軟件配合使用,用于控制機(jī)器人、數(shù)控機(jī)床和其他自動(dòng)化設(shè)備移動(dòng)或執(zhí)行各種任務(wù)。運(yùn)動(dòng)控制器主要由一臺(tái)計(jì)算機(jī)和相關(guān)的硬件組成,如數(shù)字信號(hào)處理器(DSP)和模擬/數(shù)字
2023-07-31 17:42:41554 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程顯示功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-07-29 09:15:24446 
定時(shí)器控制器提供單周期模式、周期模式、雙態(tài)模式與連續(xù)計(jì)數(shù)模式,還提供由外部腳位來(lái)對(duì)事件計(jì)數(shù)功能,以及用來(lái)捕捉或重置定時(shí)器的輸入捕捉功能。
2023-06-26 08:05:00
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542153 
運(yùn)動(dòng)控制器是一種特殊的控制器,用于控制電機(jī)的運(yùn)行模式:例如,電機(jī)通過沖擊開關(guān)控制交流接觸器,將電機(jī)拉到指定位置,然后下降或使用時(shí)間繼電器控制電機(jī)的前后旋轉(zhuǎn),或先停一會(huì)兒,再停一會(huì)兒。運(yùn)動(dòng)控制在機(jī)器人和數(shù)控機(jī)床領(lǐng)域的應(yīng)用比在專用機(jī)床中更復(fù)雜,因?yàn)楹笳叩?b class="flag-6" style="color: red">運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱為通用運(yùn)動(dòng)控制。
2023-06-12 17:17:231383 典型的運(yùn)動(dòng)控制器卡和模塊包括運(yùn)動(dòng)控制IC、微處理器以及用于處理高速編碼器信號(hào)的DSP或定制ASIC。控制器向驅(qū)動(dòng)器或放大器提供速度和旋轉(zhuǎn)方向信號(hào),進(jìn)而提供適當(dāng)?shù)碾妷汉碗娏鳎üβ剩┧絹?lái)操作電機(jī)。要設(shè)計(jì)具有反饋的魯棒且容錯(cuò)的運(yùn)動(dòng)控制系統(tǒng),必須在設(shè)計(jì)期間在系統(tǒng)級(jí)別解決以下事項(xiàng):
2023-06-12 14:51:11424 
(SCARA、Delta、6 關(guān)節(jié))、電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、舞臺(tái)娛樂設(shè)備、醫(yī)療設(shè)備、流水線等應(yīng)用場(chǎng)合。功能特點(diǎn):最多 32 軸運(yùn)動(dòng)控制。脈沖輸出模式:脈沖/方向或雙脈沖或正交脈沖。支持編
2023-06-09 16:16:351 系列高性能多軸運(yùn)動(dòng)控制器可用于機(jī)器人(SCARA、Delta、6 關(guān)節(jié))、電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、舞臺(tái)娛樂設(shè)備、醫(yī)療設(shè)備、流水線等應(yīng)用場(chǎng)合。產(chǎn)品功能:◆ 控制器本體支持 4 軸
2023-06-07 17:24:580 (SCARA、Delta、6 關(guān)節(jié))、電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、舞臺(tái)娛樂設(shè)備、醫(yī)療設(shè)備、流水線等應(yīng)用場(chǎng)合。功能特點(diǎn):◆ 最多達(dá) 16 軸運(yùn)動(dòng)控制。◆ 脈沖輸出模式:脈沖/方向或雙脈沖。◆ AXI
2023-06-05 17:38:060 (檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、醫(yī)療設(shè)備、流水線等應(yīng)用場(chǎng)合。功能特點(diǎn):控制器最多支持 16 軸運(yùn)動(dòng)控制。脈沖輸出模式:脈沖/方向或雙脈沖。支持編碼器位置測(cè)量,可以配置為手輪輸入模式。每軸最
2023-06-01 17:02:160 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC4 系列支持正運(yùn)動(dòng) XPLC 的功能,可以通過網(wǎng)絡(luò)來(lái)做組態(tài)顯示。ZMC460N 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線(其中
2023-06-01 16:37:520 管理
軸運(yùn)動(dòng)操作界面直接調(diào)試伺服、步進(jìn)
虛擬控制器仿真,脫機(jī)開發(fā)
支持C#/C++......
動(dòng)態(tài)鏈接函數(shù)庫(kù)接口,彈性擴(kuò)展
2023-06-01 09:39:23
正運(yùn)動(dòng)MOVESYNC指令實(shí)現(xiàn)多軸同步跟隨功能。
2023-05-31 09:52:17661 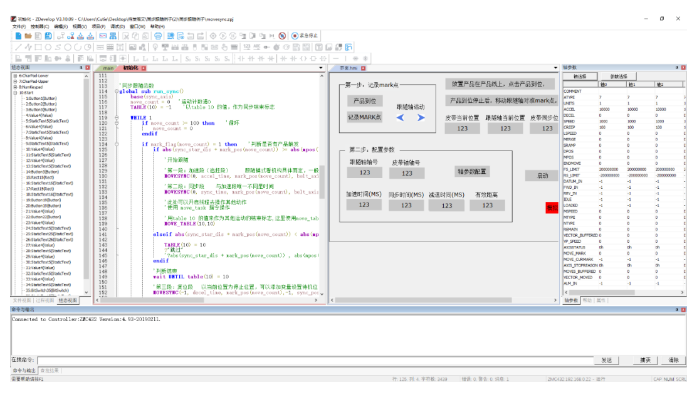
ZMC004WEA 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器。控制器本身支持 4 軸,最多可擴(kuò)展至 6 軸,用以實(shí)現(xiàn)直線插補(bǔ)、圓狐插補(bǔ)、螺旋插補(bǔ)等簡(jiǎn)單的軌跡
2023-05-25 16:10:570 數(shù)控系統(tǒng)輸入至進(jìn)給驅(qū)動(dòng)單元的除了速度控制信號(hào)外,還有伺服使能控制信號(hào),一般為DC + 24 V繼電器線圈電壓。檢查數(shù)控系統(tǒng)是否有速度控制信號(hào)輸出; 檢查使能信號(hào)是否接通。
2023-05-25 08:53:251268 數(shù)控系統(tǒng)的軸耦合功能,使展刀徑向位移與軸向進(jìn)給能夠在金屬切削加工時(shí)做到插補(bǔ)運(yùn)算,滿足外圓、圓弧、倒角等加工要求。與普通數(shù)控車床相比,應(yīng)用展刀技術(shù)的車床具有加工效率和精度高,剛性好,機(jī)床結(jié)構(gòu)緊湊,操作方便等特點(diǎn)。
2023-05-19 16:52:062670 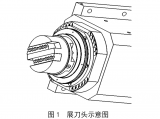
XPLC864E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款集成了 Basic、PLC 梯形圖和 HMI 組態(tài)三種編程方式于一體的運(yùn)動(dòng)控制產(chǎn)品。?XPLC864E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT
2023-05-17 14:47:260 本文以正運(yùn)動(dòng)技術(shù)具備專用手輪接口的運(yùn)動(dòng)控制器ZMC408CE為例,介紹手輪、手輪的作用及原理、控制器手輪接口接線以及手輪程序配置。
2023-05-15 10:12:18843 
XPLC108E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款集成了 Basic、PLC 梯形圖和 HMI 組態(tài)三種編程方式于一體的運(yùn)動(dòng)控制產(chǎn)品。?XPLC108E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT
2023-05-12 15:36:270 首先是運(yùn)動(dòng)控制器產(chǎn)品的復(fù)雜性。運(yùn)動(dòng)控制器可以分為PLC、專用控制器和PC-based運(yùn)動(dòng)控制器,PC-based運(yùn)動(dòng)控制器內(nèi)部還分成三大細(xì)分種類。
2023-05-12 14:37:10240 
MotionRT7是正運(yùn)動(dòng)推出的跨平臺(tái)運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核,也是國(guó)內(nèi)首家完全自主自研,自主可控的Windows運(yùn)動(dòng)控制實(shí)時(shí)軟核。
1.MotionRT7具備以下特點(diǎn)(1)獨(dú)立軟件安裝,適合各種
2023-05-12 09:59:45
相關(guān)參數(shù)的配置,EtherCAT總線初始化操作,以及初始化成功以后的運(yùn)動(dòng)控制。
一、XPLC006E功能簡(jiǎn)介
XPLC006E是正運(yùn)動(dòng)運(yùn)動(dòng)控制器推出的一款多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器
2023-05-11 09:49:04
ZMC408SCAN 激光振鏡運(yùn)動(dòng)控制器是正運(yùn)動(dòng)技術(shù)推出的高性能總線雙振鏡運(yùn)動(dòng)控制器,專為工業(yè)激光+振鏡+運(yùn)動(dòng)控制方面的應(yīng)用而設(shè)計(jì),通過 EtherCAT 總線和脈沖軸接口能實(shí)現(xiàn)多軸運(yùn)動(dòng)控制
2023-05-10 15:06:30
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)
2023-05-09 14:41:02707 實(shí)際上是形成運(yùn)動(dòng)的速度和位置的基準(zhǔn)量。合適的基準(zhǔn)量不但可以改善軌跡的精度,而且其影響作用還可以降低對(duì)轉(zhuǎn)動(dòng)系統(tǒng)以及機(jī)械傳遞元件的要求。通用運(yùn)動(dòng)控制器通常都提供基于對(duì)沖擊、加速度和速度等這些可影響動(dòng)態(tài)軌跡精度的量值加以限制的運(yùn)動(dòng)規(guī)劃方法,用戶可以直接調(diào)用相應(yīng)的函數(shù)。
2023-05-09 14:39:50636 一個(gè)多軸運(yùn)動(dòng)控制系統(tǒng)由高階的運(yùn)動(dòng)控制器(motioncontroller)與低階的伺服驅(qū)動(dòng)器(servodriver)所組成,運(yùn)動(dòng)控制器負(fù)責(zé)運(yùn)動(dòng)控制命令譯碼、各個(gè)位置控制軸彼此間的相對(duì)運(yùn)動(dòng)、加減
2023-05-09 10:56:39972 
mcu控制器是什么意思 MCU控制器是Microcontroller Unit的簡(jiǎn)稱,中文名稱為“單片機(jī)”,是一種集成了處理器、存儲(chǔ)器、輸入輸出接口等多種功能模塊于一體的小型計(jì)算機(jī)系統(tǒng)。MCU
2023-05-05 14:59:21
停一會(huì)再轉(zhuǎn)一會(huì)再停。運(yùn)動(dòng)控制在機(jī)器人和數(shù)控機(jī)床的領(lǐng)域內(nèi)的應(yīng)用要比在專用機(jī)器中應(yīng)用更復(fù)雜,因?yàn)楹笳?b class="flag-6" style="color: red">運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱為通用運(yùn)動(dòng)控制(GMC)。2、運(yùn)動(dòng)控制器的特
2023-04-25 11:22:211742 運(yùn)動(dòng)控制系統(tǒng)開發(fā)與應(yīng)用 運(yùn)動(dòng) 是以 為控制對(duì)象,以控制器為核心,以電力電子、功率變換裝置為執(zhí)行機(jī)構(gòu),在控制理論指導(dǎo)下組成的電氣傳動(dòng)控制系統(tǒng)。運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)
2023-04-21 18:04:19689 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來(lái)講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141209 運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停。
2023-04-21 10:14:31739 VPLC532E是正運(yùn)動(dòng)推出的一款EtherCAT視覺總線控制器,控制器集成了2個(gè)千兆以太網(wǎng)以及2個(gè)USB3.0、2個(gè)USB2.0接口,支持多種工業(yè)相機(jī),支持多種視覺功能和復(fù)雜的運(yùn)動(dòng)控制功能。
2023-04-19 12:38:34376 的主要特點(diǎn)是體積小、構(gòu)造簡(jiǎn)單、外部擴(kuò)展能力強(qiáng),控制功能比較強(qiáng),簡(jiǎn)單,方便使用;而微控制器的硬件結(jié)構(gòu)相對(duì)來(lái)說(shuō)比較復(fù)雜,特點(diǎn)是性能高、能耗低、易于使用,比較適用于計(jì)算機(jī)系統(tǒng)中進(jìn)行復(fù)雜的信息數(shù)據(jù)處理。 2
2023-04-13 15:11:27
ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。
ZMC4 系列支持正運(yùn)動(dòng) XPLC 的功能,可以通過網(wǎng)絡(luò)來(lái)做組態(tài)顯示。
ZMC432 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線
2023-04-13 09:10:270 嚴(yán)格來(lái)講,編碼器只會(huì)告訴你改如何定位,要如何執(zhí)行,是需要靠數(shù)控系統(tǒng)(或者PLC之類控制器)控制伺服或者步進(jìn)電機(jī)來(lái)實(shí)現(xiàn)定位的,編碼器好比人的眼睛,知道電機(jī)軸或者負(fù)載處于當(dāng)前某個(gè)位置,工業(yè)上用的一般是光電類型編碼器,下邊簡(jiǎn)單說(shuō)明一下。
2023-04-07 10:16:392021 ,否則運(yùn)動(dòng)命令無(wú)法下發(fā)給該驅(qū)動(dòng)器;3.軸的類型根據(jù)ATYPE指令的表格填寫正確類型,類型錯(cuò)誤控制器會(huì)報(bào)錯(cuò),導(dǎo)致無(wú)法運(yùn)動(dòng);4.UNITS的值設(shè)置合理,脈沖下發(fā)速度太小導(dǎo)致電機(jī)動(dòng)作微弱,肉眼無(wú)法分辨是否運(yùn)動(dòng)
2023-04-07 10:13:14
(或伺 服)電機(jī)運(yùn)行的高可靠性高速數(shù)控系統(tǒng),具有操作簡(jiǎn)便、抗干擾、性能穩(wěn)定、功能強(qiáng)大、
經(jīng)濟(jì)實(shí)用 等特點(diǎn),是各種步進(jìn)(伺服)電機(jī)運(yùn)動(dòng)控制的高性能、低成本、簡(jiǎn)便易用的解決方案,同時(shí)可支持 數(shù)字量或開關(guān)量信號(hào)輸入輸出
(I/O)控制、2 路高速脈沖計(jì)數(shù),用來(lái)控制電
2023-04-03 15:09:060 運(yùn)動(dòng)控制一直是以PLC、PC-based、專用控制器三分天下的形式各自發(fā)展,三者的市場(chǎng)份額也一直伴隨著不同市場(chǎng)的應(yīng)用發(fā)生著變化。
2023-03-25 09:11:12303 電機(jī)控制系統(tǒng)是指通過對(duì)電機(jī)的電流、電壓、轉(zhuǎn)速、位置等參數(shù)進(jìn)行控制,調(diào)節(jié)電機(jī)運(yùn)行狀態(tài)的系統(tǒng)。它通常由硬件和軟件兩部分組成,包括電機(jī)驅(qū)動(dòng)器、傳感器、控制器、編碼器等組件以及相應(yīng)的控制算法。其主要功能是控制電機(jī)的運(yùn)行、保護(hù)電機(jī)、實(shí)現(xiàn)各種運(yùn)動(dòng)模式和控制模式等。
2023-03-24 17:45:095639
 電子發(fā)燒友App
電子發(fā)燒友App



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論