本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-06 11:47:51 629
629 
控制器的傳遞函數(shù)該怎么在單片機(jī)中實(shí)現(xiàn)呢?該怎么編程呢?
2022-01-19 07:55:01
運(yùn)動(dòng)控制主要涉及步進(jìn)電機(jī)、伺服電機(jī)的控制,控制結(jié)構(gòu)模式一般是:控制裝置+驅(qū)動(dòng)器+(步進(jìn)或伺服)電機(jī)。控制裝置可以是PLC系統(tǒng),也可以是專用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。PLC系統(tǒng)作為控制
2022-03-03 15:43:50
什么是運(yùn)動(dòng)控制器運(yùn)動(dòng)控制器的特點(diǎn)運(yùn)動(dòng)控制器的控制形式什么是PLCPLC的特點(diǎn)運(yùn)動(dòng)控制器與PLC的區(qū)別
2021-03-02 06:52:24
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停
2019-06-03 17:24:58
運(yùn)動(dòng)控制器控制伺服電機(jī)的指令方式運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
插補(bǔ)并其他軸聯(lián)動(dòng)、加速曲線自動(dòng)控制等高級(jí)功能;? DMC600M 系列運(yùn)動(dòng)控制器,固件已嵌入 DMC 運(yùn)動(dòng)控制指令系統(tǒng),該指令系統(tǒng)功能強(qiáng)大、應(yīng)用靈活、使用簡(jiǎn)單,并經(jīng) 10 余年的應(yīng)用實(shí)踐及功能完善
2019-09-12 11:36:00
哪位大大做運(yùn)動(dòng)控制器開發(fā)的啊?小弟真誠(chéng)拜師求教。留下qq:1151628760
2014-09-16 09:45:26
作者:何國(guó)軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
運(yùn)動(dòng)控制器是運(yùn)動(dòng)控制系統(tǒng)的核心部件。目前,國(guó)內(nèi)的運(yùn)動(dòng)控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。
2019-10-16 06:22:14
三菱Q173HCPU(N)/Q172HCPU(N)系列運(yùn)動(dòng)控制器是在Q173CPU(N)/Q172CPU(N)系列運(yùn)動(dòng)控制器的基礎(chǔ)上推出的高性能運(yùn)動(dòng)控制器。該產(chǎn)品的主要特點(diǎn):◆ 高速運(yùn)動(dòng)控制
2021-09-07 07:22:11
運(yùn)動(dòng)控制器的類型 1、是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。 2、是以專用芯片
2019-12-10 10:41:31
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停
2021-09-07 07:40:34
如何去選擇一款控制器呢?選擇一款控制器要考慮哪些因素呢?
2021-10-26 07:17:42
怎樣去挑選一款合適的微控制器呢?選擇微控制器的步驟有哪些呢?
2021-11-04 06:25:16
意味著你不應(yīng)為未來功能擴(kuò)展甚至易用性考慮16位微控制器。記住,微控制器選型是一個(gè)反復(fù)的過程。你可能在這個(gè)步驟中選擇了一個(gè)16位的器件,但在后面的步驟中發(fā)現(xiàn)32位ARM器件會(huì)更好。這個(gè)步驟只是讓工程師有一
2016-10-21 15:18:02
設(shè)計(jì)了一種基于ARM+DSP的嵌入式運(yùn)動(dòng)控制器。該控制器將嵌入式CPU與專用運(yùn)動(dòng)控制芯片相結(jié)合,將運(yùn)動(dòng)控制功能以功能模塊的方式嵌入到ARM主控板的架構(gòu),把不需要的設(shè)備裁減掉,既兼顧功能又節(jié)省成本。該
2011-05-04 16:02:55
EtherCAT總線運(yùn)動(dòng)控制器硬件是如何進(jìn)行接線的?EtherCAT總線運(yùn)動(dòng)控制器有哪些參數(shù)設(shè)置?
2021-07-15 13:02:24
有誰(shuí)大神用過8軸的NI運(yùn)動(dòng)控制器與松下伺服電機(jī)的嗎,如何接線的,急求教,非常感謝!!!
2017-01-16 21:03:28
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如何編寫運(yùn)動(dòng)控制卡的功能函數(shù)庫(kù)。
2023-09-26 08:14:08
PLC與運(yùn)動(dòng)控制器有什么不同?為什么運(yùn)動(dòng)控制器比PLC好?plc是什么 可編程邏輯控制器是種專門為在工業(yè)環(huán)境下應(yīng)用而設(shè)計(jì)的數(shù)字運(yùn)算操作電子系統(tǒng)。它采用一種可編程的存儲(chǔ)器,在其內(nèi)部存儲(chǔ)執(zhí)行邏輯運(yùn)算
2021-09-07 08:34:53
這項(xiàng)工作是由加州州立理工大學(xué)波莫納分校、C3SR的產(chǎn)學(xué)合作課程設(shè)計(jì)項(xiàng)目。該項(xiàng)目的目標(biāo)是創(chuàng)建一個(gè)通用的運(yùn)動(dòng)控制器,與任何運(yùn)動(dòng)控制系統(tǒng)或設(shè)備兼容,解決工業(yè)和開源運(yùn)動(dòng)控制器中的問題,同時(shí)也相對(duì)便宜
2021-01-07 17:17:14
SMC304運(yùn)動(dòng)控制器2018.3產(chǎn)品概述:SMC304控制器(BASIC版):基于嵌入式...
2021-09-07 07:58:34
在工業(yè)自動(dòng)化領(lǐng)域,多任務(wù)編程在運(yùn)動(dòng)控制器上得到廣泛應(yīng)用。多任務(wù)編程允許將復(fù)雜的程序分解為獨(dú)立的任務(wù),實(shí)現(xiàn)并發(fā)性和高效處理。每個(gè)任務(wù)在運(yùn)動(dòng)控制周期中運(yùn)行,包括Motion Control、多種通訊
2023-11-07 09:52:36
本文作者利用黃石市科威自控有限公司的嵌入式plc芯片組,設(shè)計(jì)出了kp3-05m06r型運(yùn)動(dòng)控制器。該控制器集plc、can總線、rs485/232等功能于一體,與步進(jìn)驅(qū)動(dòng)器或伺服驅(qū)動(dòng)器配套使用,具有
2019-08-16 08:34:13
項(xiàng)目名稱:AGV運(yùn)動(dòng)邏輯控制器開發(fā)試用計(jì)劃:1.新項(xiàng)目開發(fā),AGV運(yùn)動(dòng)邏輯控制器項(xiàng)目開發(fā),目前還在方案選擇階段,計(jì)劃10月份進(jìn)行項(xiàng)目交付。交付成果包括基于FPGA的邏輯控制器,伺服電機(jī)驅(qū)動(dòng)方案,舵輪
2019-06-24 19:55:29
DMA控制器的主要特性有哪些?DMA控制器通道的配置過程該怎樣去完成呢?
2021-12-13 06:12:53
運(yùn)動(dòng)控制器是用來實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)準(zhǔn)確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。運(yùn)動(dòng)控制器按結(jié)構(gòu)分類可分為PLC可編程邏輯控制器、單片機(jī)控制器、獨(dú)立式運(yùn)動(dòng)控制器、基于PC機(jī)的運(yùn)動(dòng)控制卡、網(wǎng)絡(luò)控制器
2021-08-02 10:04:58
MPPT控制器是什么?為什么要使用MPPT控制器呢?
2021-10-26 07:01:22
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動(dòng)控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動(dòng)器 ?
2021-06-28 08:03:17
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來,工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來越高,為了滿足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
控制器,相對(duì)于單純使用微處理器開發(fā)運(yùn)動(dòng)控制器來說,更加方便快捷、更穩(wěn)定。系統(tǒng)結(jié)構(gòu)框圖:專用運(yùn)動(dòng)控制芯片HMC80x系列內(nèi)部結(jié)構(gòu)圖:其中外部接口CS、RD、WR、RST、A0-7、D0-7是讀寫控制總線
2020-04-15 14:35:51
創(chuàng)芯電子專業(yè)包裝機(jī)控制器開發(fā),控制器方案設(shè)計(jì),中軟創(chuàng)芯單片機(jī)開發(fā)有限公司是運(yùn)動(dòng)控制器在包裝機(jī)行業(yè)廣泛應(yīng)用的優(yōu)質(zhì)供應(yīng)商, 我們向國(guó)內(nèi)外客戶常年供應(yīng)運(yùn)動(dòng)控制器在包裝機(jī)行業(yè)廣泛應(yīng)用及其相關(guān)產(chǎn)品數(shù)碼管顯示
2011-12-28 09:59:58
創(chuàng)芯電子專業(yè)包裝機(jī)控制器開發(fā),控制器方案設(shè)計(jì),中軟創(chuàng)芯單片機(jī)開發(fā)有限公司是運(yùn)動(dòng)控制器在包裝機(jī)行業(yè)廣泛應(yīng)用的優(yōu)質(zhì)供應(yīng)商, 我們向國(guó)內(nèi)外客戶常年供應(yīng)運(yùn)動(dòng)控制器在包裝機(jī)行業(yè)廣泛應(yīng)用及其相關(guān)產(chǎn)品數(shù)碼管顯示
2011-12-28 10:03:54
運(yùn)動(dòng)控制器主要應(yīng)用于工廠里面運(yùn)轉(zhuǎn)的機(jī)器,它能使機(jī)器運(yùn)轉(zhuǎn)起來從而幫助企業(yè)完成某項(xiàng)生產(chǎn)任務(wù),間接地幫助企業(yè)產(chǎn)生利潤(rùn)。大家通過產(chǎn)品的名字—運(yùn)動(dòng)控制器,就應(yīng)該知道它能對(duì)機(jī)器進(jìn)行相應(yīng)的控制,但是大家對(duì)于里面
2021-12-29 11:26:19
(FPGA)作為核心處理器的協(xié)處理架構(gòu)的開放式運(yùn)動(dòng)控制器。該控制器將PC機(jī)和DSP的信息處理能力與FPGA的外圍擴(kuò)展功能很好的結(jié)合在一起,具有信息處理能力強(qiáng)、模塊化、開放程度高、運(yùn)動(dòng)軌跡控制精確等優(yōu)點(diǎn)。
2019-09-04 07:10:42
(FPGA)作為核心處理器的協(xié)處理架構(gòu)的開放式運(yùn)動(dòng)控制器。該控制器將PC機(jī)和DSP的信息處理能力與FPGA的外圍擴(kuò)展功能很好的結(jié)合在一起,具有信息處理能力強(qiáng)、模塊化、開放程度高、運(yùn)動(dòng)軌跡控制精確等優(yōu)點(diǎn)。
2019-08-30 08:27:17
基于DSP與FPGA的運(yùn)動(dòng)控制器設(shè)計(jì) 設(shè) 計(jì) 了 一 種 基 于 和 的 四 軸 伺 服 電 機(jī) 運(yùn) 動(dòng) 控 制 器 該 控 制 器 選 用 與 作為 核 心 部 件 針 對(duì) 運(yùn) 動(dòng) 控 制 中
2012-08-11 11:54:11
基于DSP與FPGA的運(yùn)動(dòng)控制器設(shè)計(jì)設(shè)計(jì)了一種基于DSP和FPGA的四軸伺服電機(jī)運(yùn)動(dòng)控制器,該控制器選用DSP與FPGA作為核心部件。針對(duì)運(yùn)動(dòng)控制中的一些具體問題,如高速、高精度、實(shí)時(shí)控制等,規(guī)劃
2009-09-19 09:43:00
現(xiàn)在市場(chǎng)上有基于FPGA的多電機(jī)運(yùn)動(dòng)控制器的成品嗎,注意是成品喲,成品!成品!成品!
2016-01-19 11:22:17
PC獨(dú)立運(yùn)行等優(yōu)勢(shì),得到了高速發(fā)展與廣泛應(yīng)用。本文主要研究基于OMAP平臺(tái)的嵌入式運(yùn)動(dòng)控制器,為通用嵌入式運(yùn)動(dòng)控制器的開發(fā)提供一種解決方案。文中首先分析了國(guó)內(nèi)外運(yùn)動(dòng)控制器的研究現(xiàn)狀,并對(duì)比說明了嵌入式運(yùn)...
2021-12-24 06:52:02
自主設(shè)計(jì) 了一種雙核四軸運(yùn)動(dòng)控制器 。該 運(yùn)動(dòng)控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)怎么選?這些問題你要弄明白
2021-01-21 07:59:21
為產(chǎn)品選擇正確的微控制器可能是項(xiàng)令人怯步的任務(wù)。您不僅要思考許多技術(shù)特性,還要考慮成本和備貨時(shí)間等會(huì)削弱項(xiàng)目的業(yè)務(wù)方面問題。在項(xiàng)目初期,您會(huì)有立即動(dòng)手的沖動(dòng),想要在商定系統(tǒng)的細(xì)節(jié)之前開始選擇微控制器
2021-01-26 07:29:47
不需要的設(shè)備裁減掉,既兼顧功能又節(jié)省成本。該控制器是一種可以脫離上位機(jī)單獨(dú)運(yùn)行的一種獨(dú)立型運(yùn)動(dòng)控制器,具有良好的應(yīng)用前景。那么我們具體該如何利用ARM+PCL6045B設(shè)計(jì)嵌入式運(yùn)動(dòng)控制器呢?
2019-07-31 07:52:19
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
如何去選擇適合工程需要的微控制器呢?有哪些考慮因素呢?
2021-11-02 08:01:55
小白求助,求大佬詳細(xì)介紹一下EtherCAT運(yùn)動(dòng)控制器的PLC編程
2021-10-29 07:24:05
今后基于計(jì)算機(jī)標(biāo)準(zhǔn)總線的運(yùn)動(dòng)控制器仍然是市場(chǎng)的主流,但是,基于網(wǎng)絡(luò)的嵌入式運(yùn)動(dòng)控制器會(huì)有較大的發(fā)展。基于計(jì)算機(jī)標(biāo)準(zhǔn)總線的通用運(yùn)動(dòng)控制器主要是板卡結(jié)構(gòu),采用的總線大都為ISA、PCI。由于它們的應(yīng)用依附于通用PC 計(jì)算機(jī)平臺(tái),從工業(yè)控制的角度分析,這種運(yùn)動(dòng)控制器的優(yōu)缺點(diǎn)如下:
2019-07-23 06:46:17
本文提出了一種不采用在板處理器而以PC機(jī)微處理器為控制核心的開放式四軸運(yùn)動(dòng)控制器,該運(yùn)動(dòng)控制器采用ALTERA公司的復(fù)雜可編程門陣列(CPLD)EPF6016實(shí)現(xiàn)硬件管理功能,硬件的功能可以通過軟件配置,而應(yīng)用層的功能如運(yùn)動(dòng)軌跡規(guī)劃和伺服控制等均由PC機(jī)完成。
2021-04-15 06:09:21
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語(yǔ)言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
PID控制的原理是什么?怎樣去編寫PID控制器和模糊控制器代碼呢?如何對(duì)PID控制器和模糊控制器進(jìn)行仿真呢?
2021-11-19 07:47:47
之前正運(yùn)動(dòng)技術(shù)與大家分享了,運(yùn)動(dòng)控制器的固件升級(jí)、ZBasic 程序開發(fā)、ZPLC 程序開發(fā)、與觸摸屏通訊和輸入/輸出IO 的應(yīng)用、運(yùn)動(dòng)控制器數(shù)據(jù)與存儲(chǔ)的應(yīng)用、運(yùn)動(dòng)控制器ZCAN
2021-09-07 06:59:12
EtherCAT總線擴(kuò)展模塊包含哪些?怎樣去使用正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器EtherCAT總線?
2021-09-27 08:34:04
電流環(huán)控制器的參數(shù)該怎樣去設(shè)計(jì)?轉(zhuǎn)速環(huán)控制器的參數(shù)該怎樣去設(shè)計(jì)?
2021-10-14 08:48:02
`項(xiàng)目背景隨著電機(jī)行業(yè)的飛速發(fā)展,電機(jī)測(cè)試項(xiàng)目越來越多,電機(jī)行業(yè)當(dāng)前需要對(duì)電機(jī)與驅(qū)動(dòng)器進(jìn)行完整的測(cè)試與性能分析,可是傳統(tǒng)的測(cè)功機(jī)是無法做到的,西安一所高校找到納米軟件,希望通過控制精密運(yùn)動(dòng)控制器實(shí)現(xiàn)
2021-01-12 14:02:12
請(qǐng)問各位大蝦有沒有l(wèi)abview與運(yùn)動(dòng)控制器的文檔與例子
2011-11-13 17:45:43
基于DSP/FPGA的運(yùn)動(dòng)控制器該如何去設(shè)計(jì)?
2021-05-25 06:49:01
運(yùn)動(dòng)控制器有專用的持續(xù)運(yùn)動(dòng)控制指令,運(yùn)動(dòng)控制器持續(xù)發(fā)脈沖,控制軸以指定的速度和方向持續(xù)運(yùn)動(dòng),持續(xù)運(yùn)動(dòng)常用的指令為VMOVE,以運(yùn)動(dòng)速度SPPED持續(xù)運(yùn)動(dòng),此時(shí)停止軸運(yùn)動(dòng)使用CANCEL或
2023-02-17 14:03:36
設(shè)計(jì)了一種新型的基于SOPC(system on a programmable chip)的運(yùn)動(dòng)控制器,該運(yùn)動(dòng)控制器以PC 機(jī)為上位機(jī),采用數(shù)字控制方式實(shí)現(xiàn)三坐標(biāo)的運(yùn)動(dòng)控制和相關(guān)I/O 接口控制功能。運(yùn)動(dòng)控制器采
2009-09-01 15:09:43 20
20 基于DSP的運(yùn)動(dòng)控制器的開發(fā)
運(yùn)動(dòng)控制器是一種用于多種運(yùn)動(dòng)控制場(chǎng)合的上位控制單元,通常采用專業(yè)運(yùn)動(dòng)控制芯片或高速DSP來控制步進(jìn)電機(jī)或伺服電機(jī)。運(yùn)動(dòng)控制器
2009-12-25 09:44:071965 
控制裝置可以是PLC系統(tǒng),也可以是專用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。也可以這樣理解:PLC的使用是一種普通的運(yùn)動(dòng)控制裝置。運(yùn)動(dòng)控制器是一種特殊的PLC,專職用于運(yùn)動(dòng)控制。
2017-10-19 17:41:1826995 本文首先介紹了運(yùn)動(dòng)控制器的架構(gòu)組成及優(yōu)缺點(diǎn),其次介紹了運(yùn)動(dòng)控制器的功能,最后闡述了運(yùn)動(dòng)控制器的工作原理及應(yīng)用。
2018-04-23 18:40:2235696 運(yùn)動(dòng)控制器主要應(yīng)用于工廠里面運(yùn)轉(zhuǎn)的機(jī)器,它能使機(jī)器運(yùn)轉(zhuǎn)起來從而幫助企業(yè)完成某項(xiàng)生產(chǎn)任務(wù),間接地幫助企業(yè)產(chǎn)生利潤(rùn)。大家通過產(chǎn)品的名字運(yùn)動(dòng)控制器,就應(yīng)該知道它能對(duì)機(jī)器進(jìn)行相應(yīng)的控制,但是大家對(duì)于里面一些
2020-11-09 16:57:073430 今天,正運(yùn)動(dòng)小助手給大家分享一下運(yùn)動(dòng)控制器位置鎖存功能的應(yīng)用,以ZMC408CE運(yùn)動(dòng)控制器為例,介紹多種鎖存模式的用法,用戶可根據(jù)自身需求靈活選擇。
2022-11-07 10:57:16887 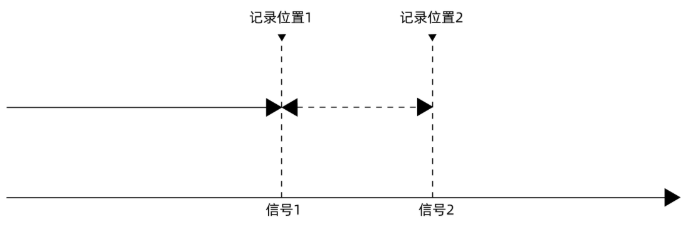
都是工業(yè)以太網(wǎng)總線,誰(shuí)家總線性能好?
2023-04-07 09:58:48559 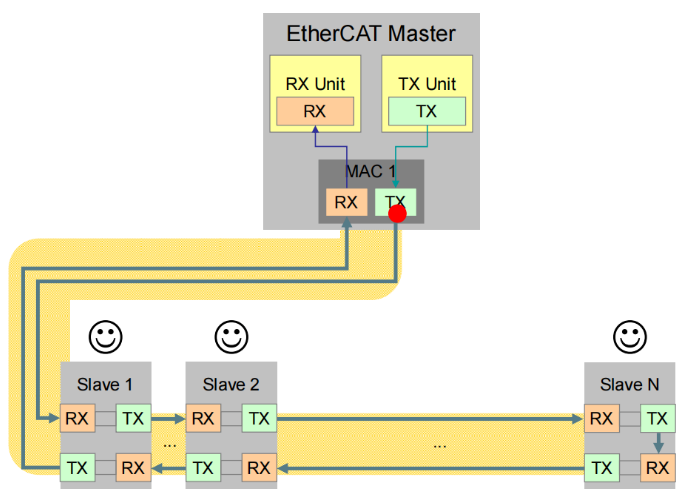
運(yùn)動(dòng)控制器實(shí)現(xiàn)追剪應(yīng)用的例程
2021-10-22 16:08:241339 
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542162 
“現(xiàn)在 PLC 的運(yùn)動(dòng)控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的 PLC 的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?”
2023-08-06 09:30:011205 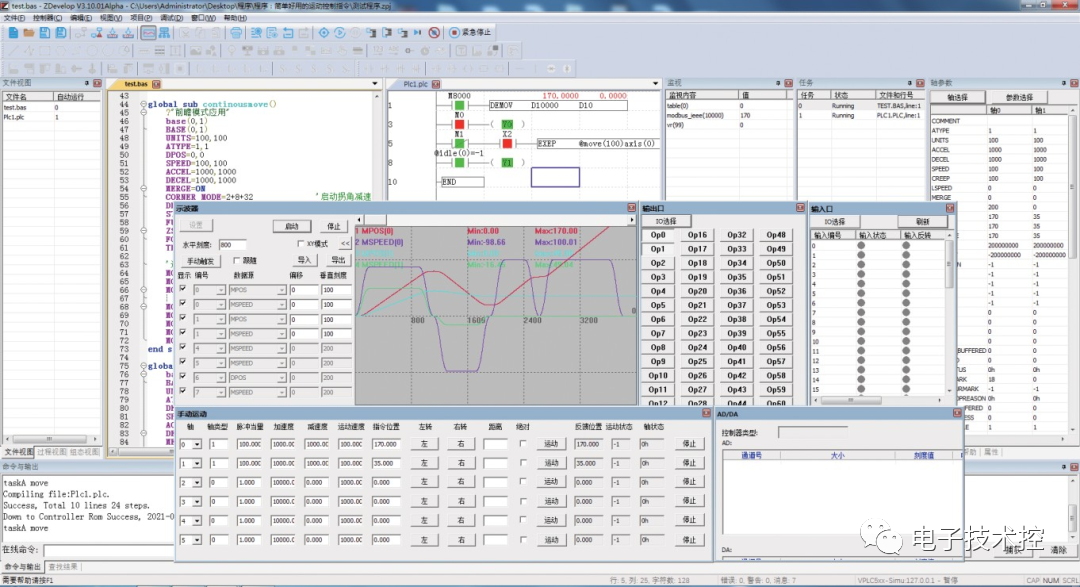
前言最近有不少做PLC開發(fā)的小伙伴,在一些咨詢運(yùn)動(dòng)控制卡、運(yùn)動(dòng)控制器相關(guān)的問題,很多人不清楚它們之間有什么區(qū)別和聯(lián)系,今天跟大家就PLC、運(yùn)動(dòng)控制卡、運(yùn)動(dòng)控制器區(qū)別及選型做個(gè)分享。背景隨著工業(yè)技術(shù)
2023-08-04 08:09:121076 
現(xiàn)在PLC的運(yùn)動(dòng)控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的PLC的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?PLC及運(yùn)動(dòng)控制器發(fā)展到今天,它們
2023-08-08 08:09:46823 PLC、PC-based、專用控制器,該選擇哪種運(yùn)動(dòng)控制器?有數(shù)據(jù)顯示,目前PLC、PC-based和專用控制器在運(yùn)動(dòng)控制市場(chǎng)中的占比分別為41%、28%和31%。 PLC在許多傳統(tǒng)的工業(yè)自動(dòng)化
2023-09-19 09:58:30449 
 電子發(fā)燒友App
電子發(fā)燒友App


 ???
??? ??
??
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論