 電子發(fā)燒友App
電子發(fā)燒友App


電機(jī)動平衡綜合測試實(shí)驗(yàn)
一、 實(shí)驗(yàn)?zāi)康?br>1、 了解動平衡測試原理及電機(jī)動平衡測試系統(tǒng)的組成,構(gòu)建方法及各環(huán)節(jié)的功能作用。
2、 通過示波器和測振表觀察電機(jī)振動與不平衡量之間的關(guān)系,從感性上加深理解旋轉(zhuǎn)
機(jī)械由于偏心而引起的振動及危害情況。
3、 實(shí)際動手測試電機(jī)的動平衡,掌握測振、配重、減振直至動平衡的整個過程;了解
傳感器測振、濾波器濾除干擾的情況和必要性。
4、 學(xué)會使用動平衡儀、示波器、測振表。
二、 實(shí)驗(yàn)原理
如圖3.1 所示,當(dāng)電機(jī)旋轉(zhuǎn)時,飛輪也隨之轉(zhuǎn)動。由于制造及安裝誤差,飛輪的質(zhì)量分
布對于電機(jī)軸線總是不對稱的,即存在一個等效的偏心質(zhì)量,左右飛輪分別為M1、M2,
M1、M2 將產(chǎn)生一個與速度成二次方的離心力,從而引起電機(jī)作正弦振動,左右飛輪正弦振
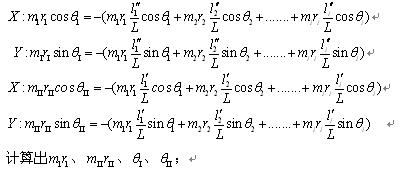
動分別為V1、V2,M1、M2 與V1、V2 有如下關(guān)系:

上式六方程聯(lián)立求解,即可知1 M 、2 M 、11 A 、12 A 、21 A 、22 A 。其中確定11 A 、12 A 、
21 A 、22 A 的過程稱之為系統(tǒng)標(biāo)定;完成標(biāo)定后,通過測量V1、V2 而計(jì)算1 M 、2 M 的過程

就是轉(zhuǎn)子動平衡測試過程。其中測量振動V1、V2 是關(guān)鍵。
三、實(shí)驗(yàn)儀器:動平衡儀、示波器、濾波器、磁電式速度計(jì)(壓電式加速度計(jì))、光電傳感器、
天平和砝碼、橡皮泥、測振表。
1、 動平衡測試儀器簡介:
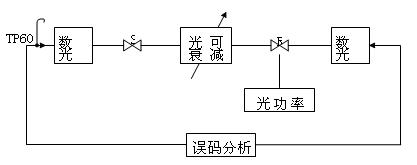
1) 動平衡測試機(jī)理
在轉(zhuǎn)子上貼一標(biāo)記(黑軸貼亮標(biāo),亮軸貼黑標(biāo))。光電傳感器對準(zhǔn)標(biāo)記,則轉(zhuǎn)子每轉(zhuǎn)一圈,
產(chǎn)生一個電脈沖。光電傳感器產(chǎn)生的脈沖信號f0 經(jīng)鎖向倍頻器產(chǎn)生128 f0,倍頻信號用于控制兩
路雙二階跟蹤濾波器,64f0 倍頻信號用于控制兩路恒帶寬跟蹤濾波器,并控制采樣和用于測速技
術(shù)。支撐Ⅰ、Ⅱ上的振動V1、V2 經(jīng)速度傳感器(加速度計(jì))變?yōu)檎医蛔冃盘枺袷庮l率和轉(zhuǎn)
子轉(zhuǎn)動頻率相同。速度傳感器產(chǎn)生的電信號中除含有上述不平衡產(chǎn)生的正弦交變信號外,還存在
由軸承振動、基礎(chǔ)振動和電磁輻射等因素產(chǎn)生的大量噪聲干擾。為此在對信號采樣之前需對信號
進(jìn)行濾波和放大。兩路振動信號進(jìn)入儀器,首先經(jīng)過雙二階跟蹤濾波器,濾除信號中的高頻噪聲;
信號經(jīng)濾波后幅度降低,再通過程控放大器1、2 進(jìn)行放大;而后再通過恒帶寬跟蹤濾波器進(jìn)行
進(jìn)一步濾波;再經(jīng)過程控放大器3、4 進(jìn)行進(jìn)一步放大。微機(jī)控制多路電子開關(guān)和A/D,對兩路
信號進(jìn)行采樣,采用后計(jì)算V1、V2 的幅值和相角,根據(jù)狀態(tài)控制和鍵盤命令進(jìn)行各種計(jì)算,并
在十六字顯示器上顯示結(jié)果。
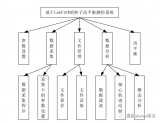
2)儀器面板介紹
儀器面板布置如圖3.2 所示,有如下六個部分。
(1) 操作鍵盤:操作鍵盤上共有24 個鍵。一個復(fù)位鍵,八個功能鍵、四個參數(shù)鍵和十一個
數(shù)字鍵。
(2) 十六個字數(shù)碼管和上方框格中兩排發(fā)光二極管:十六字數(shù)碼管分四組,配合兩排發(fā)光


(3) 標(biāo)定過程中的左加重L M ( 1 H ),右加重R M ( 2 H )、無加重( 0 H )的三個圖形,用
以提示標(biāo)定的三個主要步驟。某一種步驟( 1 H 、2 H 、0 H )測量完成時,相應(yīng)圖形下指示燈亮。
(4) 控制琴鍵開關(guān)組:“常態(tài)/補(bǔ)償鍵”,按下時可以對轉(zhuǎn)子半鍵、聯(lián)軸節(jié)不平衡進(jìn)行補(bǔ)償,
按出時為常態(tài)無補(bǔ)償測量。(注:使用補(bǔ)償前應(yīng)進(jìn)行補(bǔ)償值測試)。“測量/標(biāo)定”琴鍵,此鍵為存
儲記憶開關(guān),進(jìn)行參數(shù)存儲和標(biāo)定時要按下,否則立即彈出。“去重/加重”琴鍵,此鍵按下時顯
示加重角度,彈出顯示去重角度。“精測/快測”琴鍵,按下時采樣時間短,精度稍低,但出數(shù)快,
彈出時采樣時間長,精度高,一般不平衡容易測時用“快測”,難測時用“精測”,“標(biāo)定”時一
定用“精測”。
(5) 電源開關(guān):按下時電源指示燈亮,電源接通;彈出時電源指示燈熄滅,電源關(guān)斷。
(6) 穩(wěn)速指示燈和狀態(tài)指示燈:轉(zhuǎn)子穩(wěn)速轉(zhuǎn)動且光電傳感器一周產(chǎn)生一個脈沖時,穩(wěn)速指
示燈穩(wěn)定發(fā)光,否則閃動,狀態(tài)指示燈熄滅時指示c、d 兩點(diǎn)信號太小,變黃時指示c、d 兩點(diǎn)信
號太大發(fā)生了飽和削波,變綠色時指示c、d 兩點(diǎn)正常。
儀器后面板有四個插座和一個琴鍵。其中一個是電源插座,要求220V 交流電源,一個是光
電傳感器插座,兩個振動傳感器插座,琴鍵為自校信號切換開關(guān),按下時儀器與三個傳感器信號
線斷開并轉(zhuǎn)接內(nèi)部50HZ 自校信號。
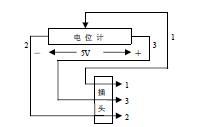
2、 磁電式速度計(jì)簡介
動平衡機(jī)中絕大多數(shù)的測振傳感器是圖3.3 所示磁電式速度傳感器。其主要由磁缸、連桿、
彈簧和線圈組成,在平衡機(jī)上磁缸與基座連接不動,連桿與轉(zhuǎn)子支撐體連接,隨轉(zhuǎn)子支撐點(diǎn)同做
水平振動,即線圈相對磁缸有相對運(yùn)動,切割磁力線,產(chǎn)生感應(yīng)電信號。
如線圈不動,從兩接線點(diǎn)AB 看進(jìn)去,其相當(dāng)于一個電阻L R ,R = 1 ~ 10KΩ L ,如線圈振
動,則AB 兩點(diǎn)看進(jìn)去相當(dāng)于一電阻串一電壓源。檢查時,可用萬用表電阻檔測內(nèi)阻值1 R ,也
可用電壓檔,檢查AB 兩點(diǎn)在敲擊支架時的電壓變化。
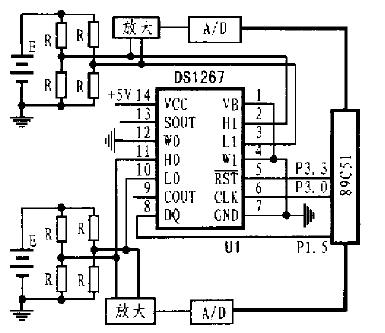
3、 光電傳感器簡介
光電傳感器的外形如圖3.4 所示, LED1 為紅外發(fā)光二極管,與400Ω電阻串接在0V 與12V
之間不斷地發(fā)射紅外光。3DU 是紅外接收三極管,當(dāng)LED1 發(fā)光射到轉(zhuǎn)子亮處,反射光打到DU 時,3DU 有電流導(dǎo)通,在2 R 產(chǎn)生電壓降, A b V ?V ,則f V 為高電平。如LED1 發(fā)光射到轉(zhuǎn)
子暗處,反射光極弱,3DU 電流小,在2 R 上電壓降小, A b V ?V ,則f V 為低電平。上述轉(zhuǎn)子的
亮暗處,由貼光標(biāo)來實(shí)現(xiàn),轉(zhuǎn)子亮則貼黑標(biāo)記,暗則貼光亮標(biāo)記,LED2 為發(fā)光二極管, f V 高
時亮綠), f V 低時不亮。RW 是亮暗反差調(diào)節(jié)器,如轉(zhuǎn)子為黑貼亮標(biāo)記,這時對好傳感器后,對著黑的部分,調(diào)節(jié)RW,也可以用調(diào)光電頭與轉(zhuǎn)子的間距來實(shí)現(xiàn)。總之最后轉(zhuǎn)一周LED2 只允許
亮一次,否則要調(diào)節(jié)。

圖 3.4 光電傳感器外形圖及測量電路
4、 濾波器簡介
濾波器是用來濾除噪聲干擾信號,放大振動信號的儀器。分布在飛輪下方基座上的兩個加速
度傳感器,分別感應(yīng)出V1、V2 兩路振動信號。此信號中還混有大量的干擾噪聲信號,包括軸承
振動,基礎(chǔ)振動,電磁輻射,隨機(jī)振動等。為此,先對兩路信號進(jìn)行低通濾波,即通過雙二階跟
蹤濾波器,濾除信號中的高頻噪聲,信號濾波后,幅度降低,再通過程控放大器1、2 做進(jìn)一步
放大;而后再通過恒帶寬跟蹤濾波器進(jìn)行二次濾波,再通過程控放大器3、4 做進(jìn)一步放大,至
此信號才是放大了的V1、V2 的振動信號。
四、 實(shí)驗(yàn)內(nèi)容方法及步驟
(一) 動平衡測試儀的標(biāo)定內(nèi)容及步驟
由實(shí)驗(yàn)原理知,測量不平衡量1 M 、2 M 是通過測量電機(jī)飛輪上的振動V1、V2 實(shí)現(xiàn)的,故標(biāo)
定就是確定1 M 、2 M 與V1、V2 之間的關(guān)系。
步驟:
1、開機(jī)預(yù)熱5 分鐘,
2、在轉(zhuǎn)子0 度位置上左加重(小螺栓用砝碼稱出重量一般為3 克左右),啟動電機(jī),
3、 測速(到預(yù)定測量速度),復(fù)位(待顯示符號后,稍候5 秒種),
4、 重新測速,待穩(wěn)定后,按“H1”(顯示H1 后,停機(jī),取下加重,)
5、 在轉(zhuǎn)子0 度位置上右加重(3 克左右),啟動電機(jī),
6、 測速(到預(yù)定測量速度),復(fù)位(待顯示符號后,稍候5 秒種),
7、 重新測速,待穩(wěn)定后,按“H2”(顯示H2 后,停機(jī),取下加重),
8、 啟動電機(jī),
9、 在測速(到預(yù)定測量速度),復(fù)位(待顯示符號后,稍候5 秒種),
10、 重新測速,待穩(wěn)定后,按“H0”(顯示H0 后,停機(jī)),
11、 按“輸入”,“ML”(左加重?cái)?shù)),“MR”(右加重?cái)?shù)),“Ф0(0)”,“N”(轉(zhuǎn)子號:1—98)
隨意選取,再按“標(biāo)定”,顯示( 11 A 、12 A 、21 A 、22 A ),標(biāo)定完成。
(二) 實(shí)驗(yàn)內(nèi)容及步驟
輸入:標(biāo)定結(jié)束后,若未關(guān)機(jī),則直接進(jìn)入測量步驟;若關(guān)機(jī),則開機(jī)后先輸入N 該轉(zhuǎn)子的
編號(N=0—98,99 用于自校),再進(jìn)入測量步驟。
步驟:
12、按“測量”鍵,顯示數(shù)值分別為左右飛輪上各需加載的重量和相角。用天平稱出相同重
量的橡皮泥,貼在飛輪上相應(yīng)的相位處。進(jìn)行配重。
13、啟動電機(jī),測速,復(fù)位再測量,又顯示結(jié)果,用天平稱出相同重量的橡皮泥,貼在飛輪
上相應(yīng)的相位處。重復(fù)12-13 步驟1-4 次,進(jìn)行配重。直至合格。(不平衡質(zhì)量m?0.2g ),填寫
表3.1。
14、用測振表測出最后一次配重后左右飛輪的垂直與水平方向的振動量。
15、 再一次次撤掉每次左右配重量,分別測出每次電機(jī)的振動量的大小。填寫表3.2,同時
觀察每次配重時,濾波器一、二級濾波的輸出波形情況并畫圖。
表3.1 電機(jī)的不平衡量與加重平衡量

圖3.5 兩次加重平衡后的濾波器上幾點(diǎn)的波形
五、 思考題1、 試用實(shí)驗(yàn)數(shù)據(jù)說明振動與不平衡的關(guān)系。
2、 說明濾波器的作用。
3、 實(shí)驗(yàn)過程中,如果橡皮泥被甩掉在不停機(jī)的情況下,如何可知?
4、 舉出日常生活中所遇到的旋轉(zhuǎn)物體由于不平衡而產(chǎn)生振動的例子,并試用本儀器進(jìn)行動
平衡測試(畫出示意圖)。
5、 畫出1、2、3、4、5、6、六點(diǎn)波形圖。
六、考核方式
課堂表現(xiàn)10%,實(shí)際操作30%,實(shí)驗(yàn)報(bào)告60%。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論