") 運(yùn)用labview和matlab混合編程實(shí)現(xiàn)轉(zhuǎn)子動(dòng)平衡的測(cè)試與控制
運(yùn)用labview和matlab混合編程實(shí)現(xiàn)轉(zhuǎn)子動(dòng)平衡的測(cè)試與控制

今天給大家分享一個(gè)案例,這個(gè)案例運(yùn)用labview和matlab 混合編程實(shí)現(xiàn)對(duì)轉(zhuǎn)子動(dòng)平衡測(cè)試與控制,具體來(lái)看下程序詳細(xì)介紹:
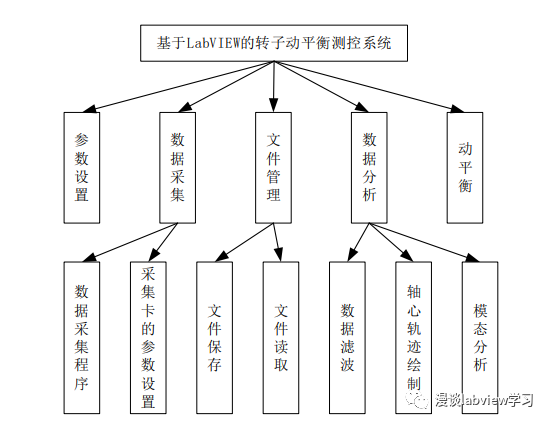
1.軟件功能:
(1)實(shí)時(shí)采集旋轉(zhuǎn)主軸的振動(dòng)信號(hào)
(2)數(shù)據(jù)動(dòng)態(tài)實(shí)時(shí)顯示
(3)振動(dòng)信號(hào)時(shí)頻域處理
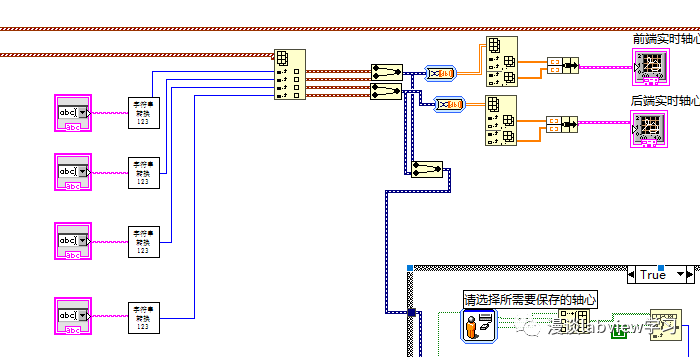
(4)旋轉(zhuǎn)主軸軸心軌跡的繪制
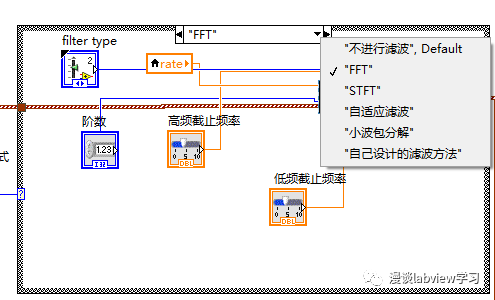
(5)振動(dòng)信號(hào)濾波處理
(6)模態(tài)分析
(7)進(jìn)行動(dòng)平衡控制
(8) 轉(zhuǎn)速的實(shí)時(shí)測(cè)量
(9)工頻特征值的提取
(10)數(shù)據(jù)保存
2.設(shè)計(jì)原理
轉(zhuǎn)子動(dòng)平衡測(cè)控軟件的基本原理是:測(cè)試系統(tǒng)實(shí)時(shí)監(jiān)測(cè)轉(zhuǎn)子的振動(dòng),系統(tǒng)對(duì)徑向或者橫向振動(dòng)信號(hào)進(jìn)行處理,停機(jī)進(jìn)行轉(zhuǎn)子不平衡量的校正。同時(shí)設(shè)計(jì)了模態(tài)分析可以輔助我們對(duì)平臺(tái)進(jìn)行臨界轉(zhuǎn)速下的動(dòng)平衡。
3.整體界面:
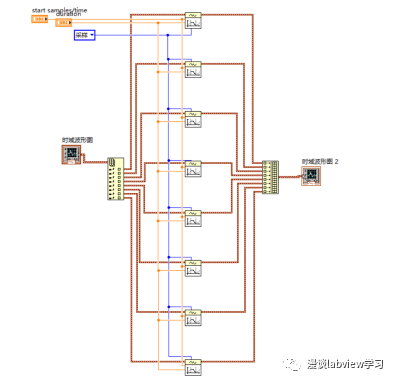
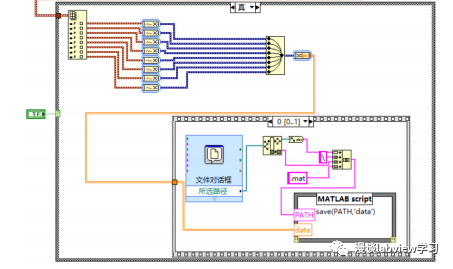
4.各模塊介紹: 1)八通道數(shù)據(jù)采集源代碼
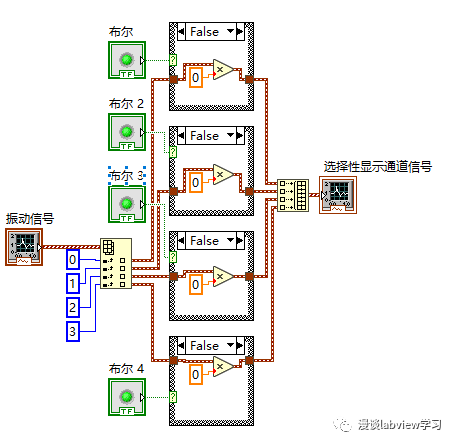
2)四通道數(shù)據(jù)選擇性顯示源代碼
3)獲取波形信號(hào)通道子集源代碼
4)轉(zhuǎn)速測(cè)量源代碼
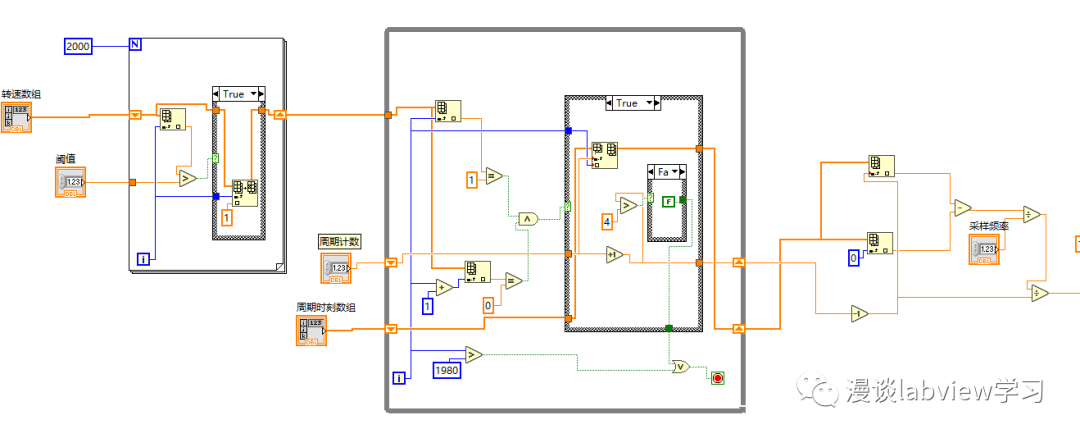
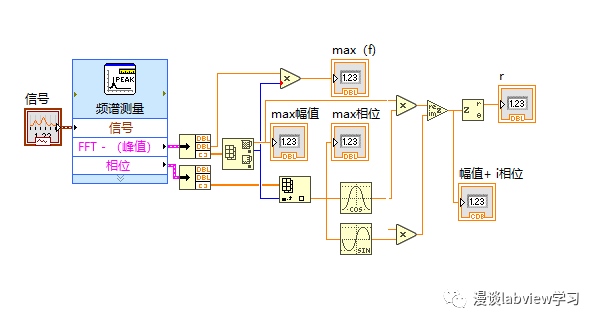
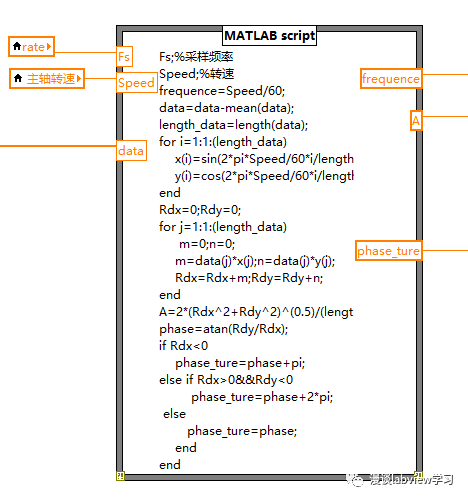
5)工頻特征值提取源代碼
6)數(shù)據(jù)保存源代碼
7)濾波
8)軸心軌跡繪制源代碼
9)LSCE 法提取模態(tài)參數(shù)源代碼

10)相關(guān)算法提取工頻特征值源代碼
原文標(biāo)題:labview轉(zhuǎn)子動(dòng)態(tài)平衡測(cè)控系統(tǒng)
文章出處:【微信公眾號(hào):labview學(xué)習(xí)日記】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
信號(hào)
+關(guān)注
關(guān)注
11文章
2851瀏覽量
78252 -
編程
+關(guān)注
關(guān)注
88文章
3689瀏覽量
95217 -
測(cè)控系統(tǒng)
+關(guān)注
關(guān)注
2文章
192瀏覽量
24147
原文標(biāo)題:labview轉(zhuǎn)子動(dòng)態(tài)平衡測(cè)控系統(tǒng)
文章出處:【微信號(hào):gh_15eff9efd85b,微信公眾號(hào):漫談labview學(xué)習(xí)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
無(wú)軸承異步電機(jī)的不平衡振動(dòng)補(bǔ)償控制
Arduino與LabVIEW聯(lián)合編程指南

KM科普小課堂 動(dòng)平衡儀和動(dòng)平衡機(jī)的區(qū)別#動(dòng)平衡儀#動(dòng)平衡校正
如何運(yùn)用MATLAB來(lái)控制DLP4500?
Disco主軸動(dòng)平衡驗(yàn)收標(biāo)準(zhǔn)
Disco主軸動(dòng)平衡的詳細(xì)驗(yàn)收步驟
氣密測(cè)試解決方案---電機(jī)轉(zhuǎn)子

實(shí)現(xiàn)設(shè)備運(yùn)行穩(wěn)定 KMbalancerII+多功能振動(dòng)分析及現(xiàn)場(chǎng)動(dòng)平衡儀解決繞線機(jī)動(dòng)平衡不良難題!

求LabVIEW程序代做,關(guān)于噪聲測(cè)量方面,需要matlab與labview混合編程,涉及優(yōu)化算法、PID控制等,可帶價(jià)聯(lián)系

保障電機(jī)穩(wěn)定運(yùn)行 KMbalancerII+多功能振動(dòng)分析及現(xiàn)場(chǎng)動(dòng)平衡儀助力工業(yè)客戶解決設(shè)備振動(dòng)超標(biāo)問(wèn)題!

動(dòng)平衡校正和振動(dòng)測(cè)量有關(guān)嗎?

KM動(dòng)平衡儀規(guī)避動(dòng)平衡裝配誤差風(fēng)險(xiǎn)!# 動(dòng)平衡儀
labview中如何實(shí)現(xiàn)字符串選擇輸出
EtherCAT運(yùn)動(dòng)控制器上位機(jī)開發(fā)之Python+Qt(三):PDO配置與SDO讀寫





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論