數(shù)字運(yùn)動(dòng)控制方法可精確調(diào)節(jié)機(jī)器人系統(tǒng)中驅(qū)動(dòng)末端執(zhí)行器的電動(dòng)機(jī)和執(zhí)行器的運(yùn)動(dòng)和定位。然而,在實(shí)踐中,開(kāi)發(fā)基于傳統(tǒng)比例積分(PI)控制器的運(yùn)動(dòng)控制系統(tǒng)的工程師通常會(huì)發(fā)現(xiàn)他們的項(xiàng)目停滯不前,因?yàn)樗麄冸y以
2022-09-08 11:48:07 2043
2043 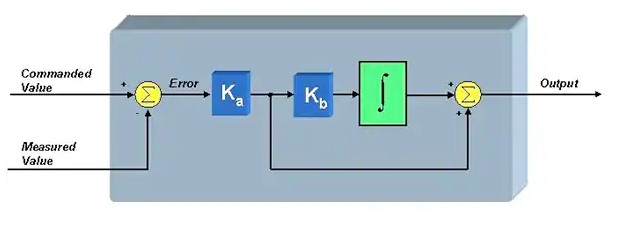
由于這些不同的產(chǎn)品和策略都可以降低運(yùn)動(dòng)控制應(yīng)用中的可聞噪聲,因此可能很難確定哪種策略更適合您的應(yīng)用。在本文中,我將以 BLDC集成控制柵極驅(qū)動(dòng)器為例,列出降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式。
2023-07-17 11:39:13668 
實(shí)習(xí)公司項(xiàng)目需要控制步進(jìn)電機(jī),電機(jī)方面主要包括控制運(yùn)動(dòng)、加減速、限位。下面介紹一下在電機(jī)控制方面的心得,由于對(duì)于電機(jī)的控制不需要很精確,并且自身能力有限,相比于大牛有很大的差距。1.需要實(shí)現(xiàn)的功能
2021-07-08 06:42:20
`如圖片,有大佬認(rèn)識(shí)這是什么運(yùn)動(dòng)控制卡的連接線嗎?目前有一根連接線,需要配一塊運(yùn)動(dòng)控制卡,緊急請(qǐng)教`
2019-09-19 15:51:19
運(yùn)動(dòng)控制卡定制開(kāi)發(fā)提供運(yùn)動(dòng)控制卡設(shè)計(jì)和生產(chǎn)全套技術(shù),感興趣的聯(lián)系,電話:***,QQ:2690602921
2016-09-08 10:40:56
承。通常,一個(gè)運(yùn)動(dòng)控制系統(tǒng)的功能包括:速度控制點(diǎn)位控制(點(diǎn)到點(diǎn))。有很多方法可以計(jì)算出一個(gè)運(yùn)動(dòng)軌跡,它們通常基于一個(gè)運(yùn)動(dòng)的速度曲線如三角速度曲線,梯形速度曲線或者S型速度曲線。電子齒輪(或電子凸輪)。也就
2016-05-07 19:22:19
NPMC/PPCI系列板級(jí)運(yùn)動(dòng)控制器為多軸數(shù)字伺服電機(jī)控制器。4軸PC/104總線(NPMC6045A-4104)和4軸PCI-總線(PPCI7443)的板有供貨。一般特點(diǎn)有高脈沖速率
2022-01-06 11:37:58
有沒(méi)有高手懂得弄運(yùn)動(dòng)控制卡?可以教一下小白我,怎么入門,用什么軟件去編程他。
2014-06-13 10:50:20
本人對(duì)運(yùn)動(dòng)控制卡一無(wú)所知,想問(wèn)一下運(yùn)動(dòng)控制是不是也像數(shù)據(jù)采集卡一樣有多組通道呢,一塊運(yùn)動(dòng)控制卡能不能實(shí)現(xiàn)同時(shí)控制幾個(gè)電機(jī)做相同的運(yùn)動(dòng)呢?
2013-06-05 00:45:32
運(yùn)動(dòng)控制卡是什么?運(yùn)動(dòng)控制卡有何功能?伺服驅(qū)動(dòng)器是什么?伺服驅(qū)動(dòng)器有哪幾種控制方式?
2021-10-09 08:17:42
運(yùn)動(dòng)控制卡設(shè)置點(diǎn)位運(yùn)動(dòng)參數(shù)中平滑時(shí)間參數(shù)的作用是什么?
2022-04-26 11:46:41
完整的控制系統(tǒng)是什么樣的?控制器的作用是什么?上位機(jī)做什么?單片機(jī)可以做什么?運(yùn)動(dòng)控制和電機(jī)控制的區(qū)別是什么?
2021-10-28 06:34:31
運(yùn)動(dòng)控制器是運(yùn)動(dòng)控制系統(tǒng)的核心部件。目前,國(guó)內(nèi)的運(yùn)動(dòng)控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。
2019-10-16 06:22:14
什么是運(yùn)動(dòng)控制器運(yùn)動(dòng)控制器的特點(diǎn)運(yùn)動(dòng)控制器的控制形式什么是PLCPLC的特點(diǎn)運(yùn)動(dòng)控制器與PLC的區(qū)別
2021-03-02 06:52:24
哪位大大做運(yùn)動(dòng)控制器開(kāi)發(fā)的啊?小弟真誠(chéng)拜師求教。留下qq:1151628760
2014-09-16 09:45:26
作者:何國(guó)軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來(lái)越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
:Q173HCPU(N)/Q172HCPU(N)系列運(yùn)動(dòng)控制器采用64位RISC處理器,程序容量有原來(lái)的224Kbyte提...
2021-09-07 07:22:11
運(yùn)動(dòng)控制器的類型 1、是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。 2、是以專用芯片
2019-12-10 10:41:31
一、定義運(yùn)動(dòng)控制(Motion Control)通常是指在復(fù)雜條件下,將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。 按照
2021-09-07 06:37:22
運(yùn)動(dòng)控制系列:運(yùn)動(dòng)軸點(diǎn)動(dòng)控制【控制要求】觸摸屏上增加左右箭頭用來(lái)控制軸1點(diǎn)動(dòng),按住向左的箭頭電機(jī)轉(zhuǎn),松手就停。觸摸屏界面: 觸摸屏上添加位按鈕 點(diǎn)動(dòng)進(jìn)M1: Modbus地址 0x1001 點(diǎn)動(dòng)退
2019-07-18 14:46:31
運(yùn)動(dòng)控制系統(tǒng)由什么組成?
2021-11-01 06:33:31
目錄前言運(yùn)動(dòng)控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動(dòng)自動(dòng)控制系統(tǒng)——運(yùn)動(dòng)控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時(shí)工業(yè)運(yùn)動(dòng)控制——電機(jī)選擇,驅(qū)動(dòng)器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
電機(jī)控制速度規(guī)劃是運(yùn)動(dòng)控制的一大關(guān)鍵點(diǎn)。這里提供一個(gè)討論話題的平臺(tái),大家可以在這里分享自己的心得!有啥關(guān)于速度好的想法,或者覺(jué)得有意思的資料可以發(fā)到這里,大家分享!
2015-09-04 11:38:31
的控制方式,封裝連接、回零、相對(duì)運(yùn)動(dòng)、絕對(duì)運(yùn)動(dòng)、使能、斷開(kāi)等函數(shù),方便調(diào)用。根據(jù)相應(yīng)的指令或者dll調(diào)用,傳入相應(yīng)的參數(shù)。此控制卡有指令和dll混合搭...
2021-09-01 07:31:42
ACS運(yùn)動(dòng)控制卡怎么使用?
2021-10-29 06:47:45
EtherCAT總線運(yùn)動(dòng)控制器硬件是如何進(jìn)行接線的?EtherCAT總線運(yùn)動(dòng)控制器有哪些參數(shù)設(shè)置?
2021-07-15 13:02:24
各位前輩好,我現(xiàn)在想用LabVIEW和研華運(yùn)動(dòng)控制卡來(lái)做4軸運(yùn)動(dòng)控制,在網(wǎng)上和淘寶上查了很多資料,都沒(méi)有找到LabVIEW運(yùn)動(dòng)控制方面的詳細(xì)資料。希望有精通LV搭載運(yùn)動(dòng)控制卡經(jīng)驗(yàn)的前輩幫忙指點(diǎn)下,收費(fèi)也可以。感激不盡
2019-10-16 08:48:57
with LabVIEW是關(guān)于視覺(jué)分析的,寫的很好,大家可以學(xué)習(xí)一下。本人也是初學(xué)者,有不對(duì)的地方,望指教,謝謝。再發(fā)一點(diǎn)關(guān)于運(yùn)動(dòng)控制的相關(guān)資料給大家分享一下。
2015-02-10 11:30:19
什么是運(yùn)動(dòng)控制卡?運(yùn)動(dòng)控制卡與驅(qū)動(dòng)器有什么不同?PLC控制好還是運(yùn)動(dòng)控制卡控制好?
2021-10-09 07:56:29
PLC與運(yùn)動(dòng)控制器有什么不同?為什么運(yùn)動(dòng)控制器比PLC好?plc是什么 可編程邏輯控制器是種專門為在工業(yè)環(huán)境下應(yīng)用而設(shè)計(jì)的數(shù)字運(yùn)算操作電子系統(tǒng)。它采用一種可編程的存儲(chǔ)器,在其內(nèi)部存儲(chǔ)執(zhí)行邏輯運(yùn)算
2021-09-07 08:34:53
基于labview的運(yùn)動(dòng)控制系統(tǒng)
2013-04-05 20:18:35
請(qǐng)問(wèn)有誰(shuí)做過(guò)labview的運(yùn)動(dòng)控制,能提供相關(guān)資料嗎?
2016-05-03 11:06:48
`不知道有沒(méi)有大神玩過(guò),用labview控制雷賽的運(yùn)動(dòng)控制卡,進(jìn)而控制伺服電機(jī)。前幾天用的好好的,不知道從什么時(shí)候開(kāi)始,labview無(wú)法控制了。而這個(gè)運(yùn)動(dòng)控制卡自帶的例程(應(yīng)該是用C語(yǔ)言寫的),還能正常控制。請(qǐng)問(wèn)問(wèn)題可能出在什么地方??`
2017-03-02 10:15:36
各位大俠,求助呀~運(yùn)動(dòng)控制卡采用的是ni公司PCI-7350,用labview編寫運(yùn)動(dòng)控制系統(tǒng)。以前沒(méi)有編寫過(guò)大型的系統(tǒng),沒(méi)什么經(jīng)驗(yàn),大俠們有沒(méi)有相關(guān)的資料,特別是編寫的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
文章目錄第1章 緒論第2章 運(yùn)動(dòng)曲線2.0 引言2.1 運(yùn)動(dòng)學(xué)的基本概念2.2 常見(jiàn)運(yùn)動(dòng)曲線2.2.1 梯形速度曲線2.2.2 S 形速度曲線第3章 傳動(dòng)鏈設(shè)計(jì)第1章 緒論什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)
2021-09-01 07:06:21
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來(lái),工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來(lái)越高,為了滿足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
需要做一個(gè)基于labview 加運(yùn)動(dòng)控制卡的伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng),請(qǐng)問(wèn)PCI-7831R 這塊板是運(yùn)動(dòng)控制卡嗎,可不可以用來(lái)做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
任務(wù)。七、HMC80x芯片資料提供有常規(guī)運(yùn)動(dòng)的接口函數(shù),多數(shù)常規(guī)運(yùn)動(dòng)可以直接調(diào)用函數(shù)即可,單軸定長(zhǎng)運(yùn)動(dòng)函數(shù)定義如圖:八、直接調(diào)用函數(shù)實(shí)現(xiàn)運(yùn)動(dòng)控制:
2020-04-15 14:35:51
的應(yīng)用要比在專用機(jī)器中的應(yīng)用更復(fù)雜,因?yàn)楹笳?b class="flag-6" style="color: red">運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱為通用運(yùn)動(dòng)控制(GMC)。那么深圳運(yùn)動(dòng)控制器有什么工作原理及應(yīng)用?相信不少人是有疑問(wèn)的,今天四元數(shù)數(shù)控就跟大家解答一下!傳統(tǒng)的數(shù)控機(jī)床
2021-11-03 14:11:43
我想用pmac控制電機(jī)運(yùn)動(dòng),pmac與labview通信,并通過(guò)labview實(shí)時(shí)顯示電機(jī)運(yùn)動(dòng)狀況,請(qǐng)問(wèn)labview中如何采集信號(hào)?采集到的信號(hào)我想以波形圖的形式輸出并進(jìn)行分析
2017-05-09 16:05:49
如何使用運(yùn)動(dòng)控制卡控制電機(jī)的轉(zhuǎn)動(dòng)及轉(zhuǎn)速?
2021-10-15 06:04:52
如何使用運(yùn)動(dòng)控制卡控制電機(jī)轉(zhuǎn)動(dòng)?
2021-10-29 07:38:38
運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來(lái)越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度和靈活性,可實(shí)時(shí)完成運(yùn)動(dòng)控制過(guò)程中復(fù)雜
2019-08-06 06:27:00
就行了(運(yùn)動(dòng)控制卡4軸是為了以后萬(wàn)一學(xué)習(xí)有需要呢),最好便宜點(diǎn)的,小巧一點(diǎn)的。如果其它還需要什么硬件也請(qǐng)幫忙指出,謝謝!哪位大神能給個(gè)參考選型嗎?萬(wàn)分感謝!
2022-05-23 15:49:20
運(yùn)動(dòng)控制系統(tǒng)被廣泛地運(yùn)用于各個(gè)領(lǐng)域。傳統(tǒng)的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
控制系統(tǒng)的精確控制是非常困難的。靠改變懸掛被控對(duì)象的繩索長(zhǎng)短來(lái)控制被控對(duì)象運(yùn)動(dòng)軌跡的懸掛運(yùn)動(dòng)控制系統(tǒng),在生產(chǎn)控制等領(lǐng)域有很廣的應(yīng)用范圍,但受技術(shù)上的制約,使用也有一定限制。
2019-08-12 08:21:38
怎樣去搭建一個(gè)基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)?基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)應(yīng)具備哪些功能?
2021-08-24 06:27:47
EtherCAT總線擴(kuò)展模塊包含哪些?怎樣去使用正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器EtherCAT總線?
2021-09-27 08:34:04
實(shí)時(shí)位置及速度測(cè)量,編碼器的實(shí)驗(yàn)講解等。 主要有以下5個(gè)實(shí)驗(yàn)課程: (1)運(yùn)動(dòng)控制卡與絲杠滑臺(tái)接線方法 (2)定長(zhǎng)運(yùn)動(dòng)實(shí)驗(yàn)講解 (3)編碼器實(shí)驗(yàn)講解 (4)回原點(diǎn)運(yùn)動(dòng)實(shí)驗(yàn)講解 (5)實(shí)時(shí)位置及速度測(cè)量實(shí)驗(yàn)
2021-11-26 10:38:50
求教各位大神,現(xiàn)有一塊7344的運(yùn)動(dòng)控制卡,UMI-7774的運(yùn)動(dòng)控制接線盒,想要控制店家,如何在MAX里面進(jìn)行配置?
2016-01-21 22:12:33
麥克納姆輪的運(yùn)動(dòng)學(xué)和運(yùn)動(dòng)控制各輪的轉(zhuǎn)動(dòng)和移動(dòng)機(jī)器人整體運(yùn)動(dòng)的關(guān)系開(kāi)環(huán)運(yùn)動(dòng)控制麥克納姆輪的運(yùn)動(dòng)學(xué)各輪的轉(zhuǎn)動(dòng)和移動(dòng)機(jī)器人整體運(yùn)動(dòng)的關(guān)系L是車身半長(zhǎng),w是車中線到輪子中線的距離,r是輪子和輪轂的角度;麥輪
2021-08-30 08:06:08
電機(jī)轉(zhuǎn)子運(yùn)動(dòng)慣量的計(jì)算方法哪些,如何避免轉(zhuǎn)子慣性失配?
2021-02-02 07:25:12
電磁控制運(yùn)動(dòng)裝置的周期怎樣控制
2015-08-08 23:18:23
跪求2014 的運(yùn)動(dòng)控制模塊下載鏈接
2017-05-06 21:56:45
運(yùn)動(dòng)控制器有專用的持續(xù)運(yùn)動(dòng)控制指令,運(yùn)動(dòng)控制器持續(xù)發(fā)脈沖,控制軸以指定的速度和方向持續(xù)運(yùn)動(dòng),持續(xù)運(yùn)動(dòng)常用的指令為VMOVE,以運(yùn)動(dòng)速度SPPED持續(xù)運(yùn)動(dòng),此時(shí)停止軸運(yùn)動(dòng)使用CANCEL或
2023-02-17 14:03:36
介紹了三種基于DSP的無(wú)線運(yùn)動(dòng)控制方法, 無(wú)線接受器接收遙控器發(fā)射器的控制指令,將指令傳送到DSP2407主控板處理,根據(jù)控制指令用PWM 波控制兩個(gè)電機(jī)協(xié)調(diào)運(yùn)轉(zhuǎn)。關(guān)鍵詞:DSP
2009-03-30 22:10:36 15
15 運(yùn)動(dòng)控制系統(tǒng)的核心控制對(duì)象是軸。采用面向?qū)ο?b class="flag-6" style="color: red">方法,建立軸對(duì)象的類結(jié)構(gòu)、狀態(tài)轉(zhuǎn)移圖和數(shù)據(jù)流圖,在該模型的基礎(chǔ)上,可以進(jìn)行軸控制參數(shù)的設(shè)置,運(yùn)動(dòng)控制庫(kù)函數(shù)的規(guī)劃和
2009-06-09 11:44:2210 設(shè)計(jì)了一種新型的基于SOPC(system on a programmable chip)的運(yùn)動(dòng)控制器,該運(yùn)動(dòng)控制器以PC 機(jī)為上位機(jī),采用數(shù)字控制方式實(shí)現(xiàn)三坐標(biāo)的運(yùn)動(dòng)控制和相關(guān)I/O 接口控制功能。運(yùn)動(dòng)控制器采
2009-09-01 15:09:4320 高速移動(dòng)平臺(tái)橫向運(yùn)動(dòng)自抗擾控制:采用自抗擾控制(activedisturbancerejectioncontrol,ADRC)方法,對(duì)高速輪式車輛和機(jī)器人等移動(dòng)
2010-03-18 16:20:5821 臺(tái)達(dá)運(yùn)動(dòng)控制型PLC應(yīng)用技術(shù)
本文簡(jiǎn)述臺(tái)達(dá)DVP20PM運(yùn)動(dòng)控制型PLC的硬件及軟件結(jié)構(gòu),并介紹在應(yīng)用中的方法及特點(diǎn)。 關(guān)鍵詞:PLC 運(yùn)
2009-06-13 17:04:072963 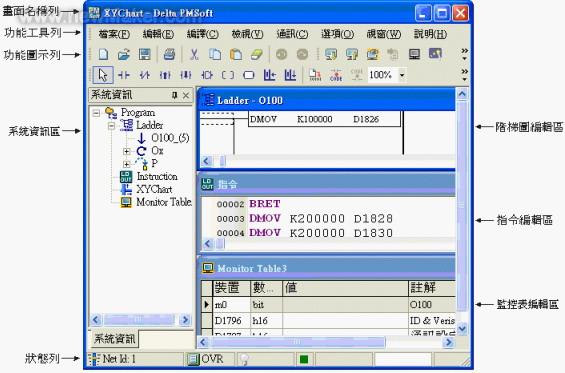
基于DSP的運(yùn)動(dòng)控制器的開(kāi)發(fā)
運(yùn)動(dòng)控制器是一種用于多種運(yùn)動(dòng)控制場(chǎng)合的上位控制單元,通常采用專業(yè)運(yùn)動(dòng)控制芯片或高速DSP來(lái)控制步進(jìn)電機(jī)或伺服電機(jī)。運(yùn)動(dòng)控制器
2009-12-25 09:44:071965 
本文主要論述了并聯(lián)機(jī)構(gòu)奇異點(diǎn)的分析方法,進(jìn)行了冗余驅(qū)動(dòng)機(jī)構(gòu)運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)分析,提出了控制策略,實(shí)現(xiàn)了并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)控制
2011-07-06 17:51:1322 PPT運(yùn)動(dòng)控制電力拖動(dòng)
2017-03-21 20:01:590 數(shù)字運(yùn)動(dòng)控制方法提供精確的機(jī)器人和致動(dòng)器的驅(qū)動(dòng)端部效應(yīng)器在機(jī)器人系統(tǒng)的運(yùn)動(dòng)和定位的調(diào)節(jié)。然而,在實(shí)踐中,工程師開(kāi)發(fā)基于傳統(tǒng)的比例積分(PI)控制器的運(yùn)動(dòng)控制系統(tǒng)通常會(huì)發(fā)現(xiàn)他們的項(xiàng)目停滯不前,因?yàn)樗麄儝暝{(diào)整敏感的控制器參數(shù)。一個(gè)更有效的方法降低了調(diào)諧的復(fù)雜性,同時(shí)提供穩(wěn)定的性能,在寬范圍的操作條件。
2017-05-09 09:06:261 函數(shù)庫(kù)中的指令,就可以實(shí)現(xiàn)運(yùn)動(dòng)控制器的各種功能。下面分別講述DOS.Windows 系統(tǒng)、WinCE 系統(tǒng)下函數(shù)庫(kù)的使用方法。
2017-10-11 17:44:5633 控制裝置可以是PLC系統(tǒng),也可以是專用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。也可以這樣理解:PLC的使用是一種普通的運(yùn)動(dòng)控制裝置。運(yùn)動(dòng)控制器是一種特殊的PLC,專職用于運(yùn)動(dòng)控制。
2017-10-19 17:41:1826995 以六自由度串聯(lián)機(jī)械手為研究對(duì)象,基于自主研發(fā)的以DSP+FPGA為核心的運(yùn)動(dòng)控制器,提出了一種機(jī)械手連續(xù)軌跡控制的方法。首先采用D-H坐標(biāo)建立運(yùn)動(dòng)學(xué)模型,幾何法推導(dǎo)模型逆解并用MATLAB做運(yùn)動(dòng)
2018-02-01 15:15:062 針對(duì)船舶航行中的混沌運(yùn)動(dòng)控制問(wèn)題,從船舶操縱運(yùn)動(dòng)非線性模型入手,提出了一種基于受控混沌系統(tǒng)Melnikov函數(shù)的矩形脈沖微擾控制方法。控制方法利用矩形脈沖對(duì)混沌系統(tǒng)參量進(jìn)行微擾控制。通過(guò)求解混沌系統(tǒng)
2018-02-12 16:35:040 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4726 種多軸運(yùn)動(dòng)控制設(shè)備實(shí)現(xiàn)方法
2018-04-11 10:27:227 本文首先介紹了運(yùn)動(dòng)控制器的架構(gòu)組成及優(yōu)缺點(diǎn),其次介紹了運(yùn)動(dòng)控制器的功能,最后闡述了運(yùn)動(dòng)控制器的工作原理及應(yīng)用。
2018-04-23 18:40:2235696 此文是根據(jù)北京大學(xué)工學(xué)院謝廣明教授于2019年5月在浙江寧波余姚舉行的第六屆中國(guó)機(jī)器人峰會(huì)上的《一種基于強(qiáng)化學(xué)習(xí)與計(jì)算流體力學(xué)結(jié)合的機(jī)器魚運(yùn)動(dòng)控制方法》報(bào)告錄音整理摘編部分而成,
2019-07-19 17:49:283454 運(yùn)動(dòng)模式是指規(guī)劃一個(gè)或多個(gè)軸運(yùn)動(dòng)的方式。 運(yùn)動(dòng)控制器支持的運(yùn)動(dòng)模式有點(diǎn)位運(yùn)動(dòng)模式、 Jog運(yùn)動(dòng)模式、電子齒輪(即 Gear) 運(yùn)動(dòng)模式和插補(bǔ)運(yùn)動(dòng)模式
2019-11-25 08:00:0023 的狀態(tài)控制輸入,從而實(shí)現(xiàn)移動(dòng)機(jī)器人的橫向運(yùn)動(dòng)控制。該方法無(wú)需進(jìn)行攝像機(jī)的外部參數(shù)標(biāo)定,大大簡(jiǎn)化了計(jì)算過(guò)程,提高了視覺(jué)導(dǎo)航的實(shí)時(shí)性。
2020-07-03 17:45:0720 基于便攜腦機(jī)接口的輪椅運(yùn)動(dòng)控制方法
2021-06-23 10:57:1221 XPLC006E是正運(yùn)動(dòng)運(yùn)動(dòng)控制器推出的一款多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器,XPLC系列運(yùn)動(dòng)控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場(chǎng)合。
2022-05-27 11:50:211369 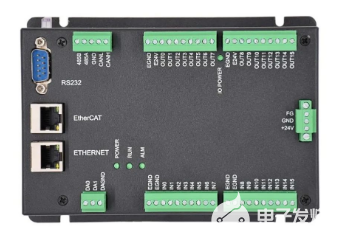
運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來(lái)完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無(wú)縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2022-07-22 09:52:463864 系列文章的第 4 部分討論了電機(jī)控制方法,例如微步,以及驅(qū)動(dòng)器的選擇以實(shí)現(xiàn)更高分辨率和更平滑的運(yùn)動(dòng)
2022-08-10 16:38:57763 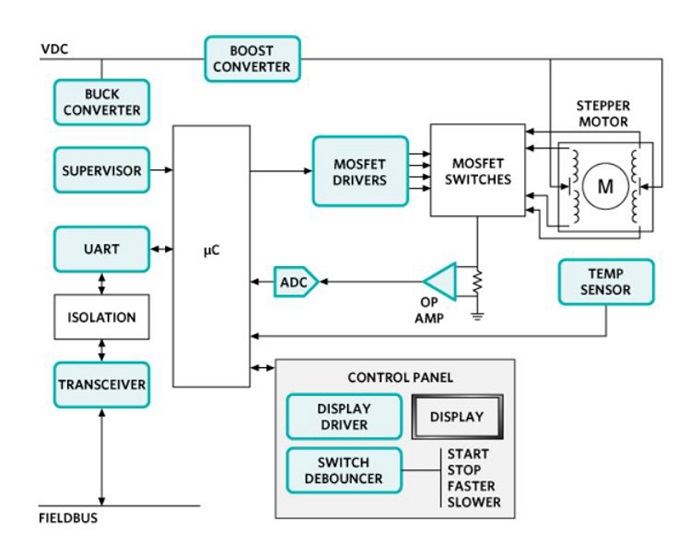
運(yùn)動(dòng)控制是 PLC 重要的應(yīng)用領(lǐng)域,本文以一個(gè)簡(jiǎn)化版的跑步機(jī)為例,介紹一下在 AWPLC 中使用運(yùn)動(dòng)控制塊的基本方法。 ?? 背景 AWTK ?全稱 Toolkit AnyWhere,是 ZLG
2022-12-14 12:05:02583 C#對(duì)雷賽運(yùn)動(dòng)控制卡的應(yīng)用案例1:定長(zhǎng)運(yùn)動(dòng)2:連續(xù)運(yùn)動(dòng)3:插補(bǔ)運(yùn)動(dòng)4:PVT運(yùn)動(dòng)5:手輪運(yùn)動(dòng)6:回原點(diǎn)運(yùn)動(dòng)7:IO8:AD-DA9:高速位置比較+鎖存
2023-03-31 15:13:020 正運(yùn)動(dòng)技術(shù)CAD導(dǎo)圖軟件配合控制器的使用方法
2021-10-12 18:20:031318 
EtherCAT運(yùn)動(dòng)控制卡實(shí)現(xiàn)C#的單軸運(yùn)動(dòng)控制的例程
2021-10-22 16:07:321813 
EtherCAT運(yùn)動(dòng)控制卡的輔助調(diào)試工具與方法介紹
2021-11-15 18:52:481587 
運(yùn)動(dòng)控制是PLC重要的應(yīng)用領(lǐng)域,本文以一個(gè)簡(jiǎn)化版的跑步機(jī)為例,介紹一下在AWPLC中使用運(yùn)動(dòng)控制塊的基本方法。背景AWTK全稱ToolkitAnyWhere,是ZLG開(kāi)發(fā)的開(kāi)源GUI引擎,旨在
2022-12-15 10:23:12299 
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542162 
前言最近有不少做PLC開(kāi)發(fā)的小伙伴,在一些咨詢運(yùn)動(dòng)控制卡、運(yùn)動(dòng)控制器相關(guān)的問(wèn)題,很多人不清楚它們之間有什么區(qū)別和聯(lián)系,今天跟大家就PLC、運(yùn)動(dòng)控制卡、運(yùn)動(dòng)控制器區(qū)別及選型做個(gè)分享。背景隨著工業(yè)技術(shù)
2023-08-04 08:09:121076 
在激光振鏡運(yùn)動(dòng)控制系統(tǒng)中不但有運(yùn)動(dòng)的控制,還有激光的控制。如何有效地處理振鏡運(yùn)動(dòng)和激光開(kāi)關(guān)的配合是本節(jié)要解決的問(wèn)題,只有有效的協(xié)調(diào)了激光和運(yùn)動(dòng)的關(guān)系,才能運(yùn)動(dòng)出精確的軌跡。
2021-09-26 11:44:591352 
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來(lái)講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52819 車輛運(yùn)動(dòng)學(xué)模型 基于車輛運(yùn)動(dòng)學(xué)模型的控制方法主要考慮了車輛的運(yùn)動(dòng)學(xué)約束對(duì)車輛控制的影響。 平時(shí)見(jiàn)到的汽車屬于 阿克曼轉(zhuǎn)向,通常可以簡(jiǎn)化為兩輪的自行車模型 其假設(shè)車輛的前后輪均為剛體,只能沿著車輪滾動(dòng)
2023-11-15 16:16:24199 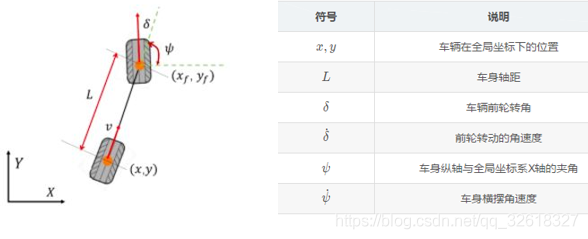
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論