電機位置編碼器廣泛用于伺服驅(qū)動器、機器人、機床、印刷機、紡織機和電梯等工業(yè)電機控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2018-05-16 08:43:56 8258
8258 在本系列中,到目前為止,我們已經(jīng)討論了針對電機位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485
2018-05-28 09:20:2211137 ? ?1.?最常見的電機位置傳感器有哪些? 用于電機的最先進的位置傳感器被認為是基于旋轉(zhuǎn)變壓器(resolver-based)和編碼器(encoder-based)的傳感器。 1.1基于旋轉(zhuǎn)
2023-08-30 09:09:022916 
加一個反饋電阻加一個小電感和輸出端一個電解小電容即可。在直流應(yīng)用中些方案只需7個元件就可實現(xiàn)穩(wěn)定輸出5V的全電壓方案。在交流應(yīng)用中也只需在直流應(yīng)用方案的前輸入端加一個整流即可。下面是220V轉(zhuǎn)5V小體積方案的應(yīng)用參數(shù)原理圖:
2019-12-13 10:55:22
51單片機位置式、增量式算法程序
2014-03-11 16:51:50
` 本帖最后由 甜心20155 于 2016-5-23 18:24 編輯
在這個電腦飛速發(fā)展的時代,由于主板、CPU和GPU的整合度逐步提升,小體積的迷你主機已經(jīng)在不知不覺中走進了千家萬戶,從
2016-05-23 18:15:17
`make flash`時無法燒錄固件其他可能不會產(chǎn)生錯誤代碼的問題電機在高速旋轉(zhuǎn)時會中斷或失控(ie: > 5000 RPM)靜止時電機振動或發(fā)出噪音電機位置控制出現(xiàn)過沖或在目標位置震蕩電機開...
2021-09-17 09:00:14
,電機速度PID控制的結(jié)構(gòu)圖如下,目標值是設(shè)定的速度,通過編碼器獲取電機的轉(zhuǎn)速作為反饋,實現(xiàn)電機轉(zhuǎn)速的控制。再來看電機位置PID控制,其結(jié)構(gòu)圖如下,目標值是設(shè)定的位置,通過編碼器獲取電機累計轉(zhuǎn)動的脈沖數(shù)作為反饋,實現(xiàn)電機位置的控制。所以:對比兩張圖,速度控制與位置控制的主要區(qū)別,就是控制量的不同。
2021-06-29 07:39:25
電機位置信號的重要性在永磁同步電機FOC控制算法中,需要用到一個非常重要的物理量是電機的位置信號。這個位置信號到底有多重要呢?還是用數(shù)據(jù)來說話吧。筆者搭建了一個電機的電流環(huán)仿真模型,固定電機轉(zhuǎn)速
2021-08-27 07:36:41
我要做電機位置隨動的仿真,就是模擬信號轉(zhuǎn)化數(shù)字量,然后電機根據(jù)數(shù)字指令轉(zhuǎn)相應(yīng)角度(位置),電機用的是位置編碼電機就是可以發(fā)出脈沖數(shù)的那種,,真得很急用啊 ,,有沒有大神幫幫忙,或者給我個思路也可以。!!!!
2014-09-09 01:22:09
27VDC。四、工作量要求1、完成控制系統(tǒng)原理圖設(shè)計;2、完成直流伺服電機位置控制系統(tǒng)建模,PID控制器的設(shè)計,基于LABVIEW的實時控制軟件開發(fā)及實驗,完成仿真結(jié)果與實驗結(jié)果的對比分析,并提出改進措施
2019-04-02 09:40:03
選用英飛凌TC1782平臺和解碼芯片AD2S1210,為了獲得電機位置,曾嘗試了并行端口下的普通模式和配置模式,代碼是參照芯片手冊時序?qū)懙模⑶視r序沒錯誤!但是現(xiàn)在兩種情況下出現(xiàn)的問題分別
2023-12-13 07:40:38
各位專家好,我最近在用AD2S1210采集電機位置時發(fā)現(xiàn)有時連續(xù)好幾個周期采到的電機碼值都相同,而且轉(zhuǎn)速越高這種情況越多。現(xiàn)象很固定,不是碼值亂跳,也不是上下波動,而是不變。請問ADI專家這可能由什么原因所引起呢?謝謝!
2018-09-12 11:23:07
生產(chǎn)機械或其機構(gòu)產(chǎn)生一定的位置變化,這時需要的控制量就不再是電機的轉(zhuǎn)速,而是控制對象的直線位移,因此需將電機的轉(zhuǎn)速輸出轉(zhuǎn)換為電機的位移輸出。1 電機位置控制模塊的設(shè)計1.1 直流電機位置控制的方法 在此
2020-10-23 11:37:01
生產(chǎn)機械或其機構(gòu)產(chǎn)生一定的位置變化,這時需要的控制量就不再是電機的轉(zhuǎn)速,而是控制對象的直線位移,因此需將電機的轉(zhuǎn)速輸出轉(zhuǎn)換為電機的位移輸出。1 電機位置控制模塊的設(shè)計1.1 直流電機位置控制的方法 在此
2020-04-15 13:53:20
`小體積 PD 18W方案非標, 可以做認證方案另有A+C 18W27W36W等 單路 雙路 非標/認證方案更多優(yōu)勢方案歡迎聯(lián)系***,QQ 1850196407`
2020-01-08 17:23:36
單路高速小體積 CANFD 隔離收發(fā)模塊
2023-03-28 13:03:28
業(yè)界各位親們,眾所周知,在電機控制世界里,要想做到精確控制,位置和電流采集是至關(guān)重要的,所以能否請各位能否分享一下經(jīng)驗:1,如何保證電流采集量的準確性?2,如何保證電機位置采集的準確性?AU6802
2016-10-24 20:45:11
隨著simulink版本的更新,一些模塊存放位置發(fā)生變換,老版本中電機位置在目錄SimPowerSystems>>Machines目錄下就是各種自帶的電機模型2018版本的電機位置在
2020-05-15 16:31:46
項目名稱:視覺定位試用計劃:項目名稱:視覺定位系統(tǒng)計劃:借助視覺方案,對物料進行精準取放,視覺標定好后,正式運行時,對當前物料拍照,對照標定時的視覺模板,進行電機位置調(diào)整,以實現(xiàn)精準取放。預(yù)期成果:相機視野內(nèi)的物料都可以實現(xiàn)精準取放,初始位置不準確的物料,經(jīng)過調(diào)整,依舊可以精準取放。
2020-11-23 15:10:00
01概述:與直流電機相比,永磁同步電機具有體積小、 效率高、無需維護等優(yōu)點,在某些應(yīng)用場景中,由位置傳感器精度引起的轉(zhuǎn)矩波動應(yīng)限制在1%以內(nèi),這就要求電機位置傳感器具有足夠的精度。AS5040磁旋轉(zhuǎn)
2021-09-22 09:41:15
在本系列中,到目前為止,我們已經(jīng)討論了針對電機位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。這些是使用基于RS-485或
2018-09-04 14:48:19
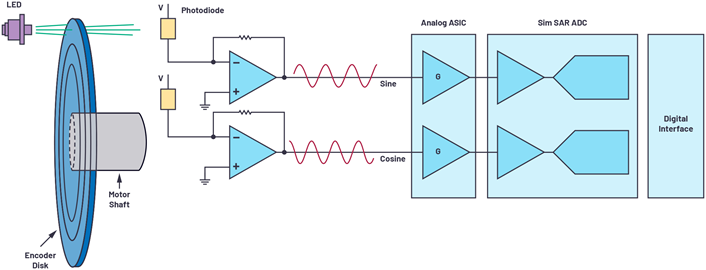
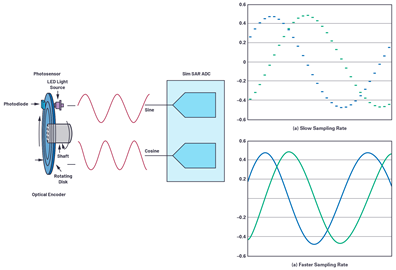
光學(xué)通道A和B收集電動機的方向和速度數(shù)據(jù)。為了測量方向,光學(xué)器件的位置以及每個光學(xué)輪窗之間的距離在A和B方波之間建立了90度相位。電機方向與相角的符號有關(guān)。如果A通道的上升沿先于B通道的上升沿,則
2020-09-15 10:09:32
關(guān)于STM32PID閉環(huán)控制智能電機位置知識點你想知道的都在
2021-10-20 06:55:28
增量式光電脈沖編碼器做反饋的交流伺服電機控制系統(tǒng),講述了正弦波永磁同步電機伺服系統(tǒng)控制原理,電機轉(zhuǎn)子初始位置測量的原理,通過了實驗分析驗證方案可行性。推薦課程:張飛軟硬開源,基于STM32 BLDC
2016-01-22 10:26:03
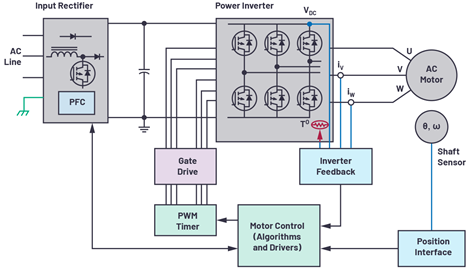
錯時,系統(tǒng)能以安全地方式停止運行。電流檢測放大器通常用于間接精確測量電機負載,一般應(yīng)用于三個電機相位中的兩個相位,提供額外的診斷信息(可以作為整體系統(tǒng)安全保障措施的一部分)。此外,高度準確的電機位置
2020-01-13 10:03:53
電機位置編碼器廣泛用于伺服驅(qū)動器、機器人、機床、印刷機、紡織機和電梯等工業(yè)電機控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2018-09-05 16:07:42
課題是永磁同步電機位置控制,看了很多文章,然并卵,最好是基于智能算法的就更好了。
2015-12-31 10:38:24
我有一個生產(chǎn)程序,可以序列化PSoC 5LP而被編程。看來,我可以分配一個物理位置和一個開始值,它將依次遞增號碼到這個位置,我的每一個設(shè)備,我計劃。序列號將是2字節(jié)值。我不確定如何在PoSoice設(shè)備中設(shè)置位置(如何選擇物理地址和使用什么聲明),然后如何在運行時從地址讀取。謝謝
2019-09-16 10:54:21
直流減速電機:電機1000r/min,減速后200r/min。電機尾部帶有增量式霍爾編碼器,分辨率12PPR。現(xiàn)想實現(xiàn)統(tǒng)計霍爾脈沖數(shù)進行位置和速度調(diào)節(jié),各位大佬有沒有什么建議?目的是實現(xiàn)給定位置,精準定位。允許每次定位2個脈沖誤差。
2019-04-03 07:55:44
如何測量電機轉(zhuǎn)子的位置?
2021-09-24 07:03:45
怎么才能實現(xiàn)高精度的步進電機位置控制
2023-10-13 07:40:50
我現(xiàn)在搞異步電機位置控制。請問高手,電機精確定位硬件上有什么特殊要求嗎?謝謝!我電機上接了碼盤,可是電機有慣性,發(fā)送停止命令,電機還要再轉(zhuǎn)一下才停。怎么解決?謝謝!
2018-11-22 10:04:51
本文介紹了一種基于AD、CPLD、串行閃存來實現(xiàn)的小體積的數(shù)據(jù)采集系統(tǒng)。與其他數(shù)據(jù)采集系統(tǒng)相比,該系統(tǒng)體積小,存儲器便于控制,易于升級存儲器的容量,能夠滿足一般的信號采集。不足是系統(tǒng)的采樣頻率不夠高,只能達到250kHz/S,不適于高頻信號的采集。
2021-04-07 06:48:52
目前做一個電機位置控制時,遇到一個問題: 目的是直流電機轉(zhuǎn)動一圈停止,電機起始位置與停止位置始終在同一位置 電機轉(zhuǎn)動一圈后,編碼器輸出1000個電平跳變信號,當我讀取到1000信號時,停止電路
2020-03-13 05:20:31
用速度來做閉環(huán)控制。3.加速度環(huán),就是用加速度來做閉環(huán)控制。這三種控制策略都能實現(xiàn)拓達步進電機的定位控制。但是速度環(huán)和加速度環(huán)不僅可以控制位置還能實現(xiàn)步進電機的速度和加速度的控制;而且速度環(huán)和加速度環(huán)
2018-08-25 10:05:53
01概述: 與直流電機相比,永磁同步電機具有體積小、 效率高、無需維護等優(yōu)點,在某些應(yīng)用場景中,由位置傳感器精度引起的轉(zhuǎn)矩波動應(yīng)限制在1%以內(nèi),這就要求電機位置傳感器具有足夠的精度
2023-03-09 15:30:26
做一個升降模塊,要判斷模塊也升到頂部或底部,(這時校準),不知如何實現(xiàn),可用堵轉(zhuǎn)嗎?對位置控制用碼盤可以嗎?
2017-12-28 09:54:43
本文提出一種電機負載位置測量儀的實現(xiàn)方案,其主要功能由FPGA實現(xiàn),能實時測量和顯示電機負載的運動狀態(tài)和位置,具有精度高,工作可靠的特點,有一定的通用性。
2010-08-06 16:17:31 11
11 小體積無線收發(fā)模塊安陽市新世紀電子研究所(www.ayxsj.com)主要研究生產(chǎn)各種特小體積、特低功耗微型無線收發(fā)模塊|無線發(fā)射模塊|無線接收模塊|無
2008-09-04 08:53:35666 鋰錳紐扣電池小體積大能量 鋰-二氧化錳電池是近年來迅速發(fā)展的一種全新的高性能化學(xué)電池。在越來越注重環(huán)保的現(xiàn)代社會,
2009-11-18 10:51:54633 基于串行閃存小體積的數(shù)據(jù)采集系統(tǒng)的設(shè)計與實現(xiàn)
0 引 言
在現(xiàn)代電子測量、儀器儀表、生物醫(yī)學(xué)等領(lǐng)域中,經(jīng)常涉及到現(xiàn)場采集模擬信號的工作,
2009-12-15 09:54:14677 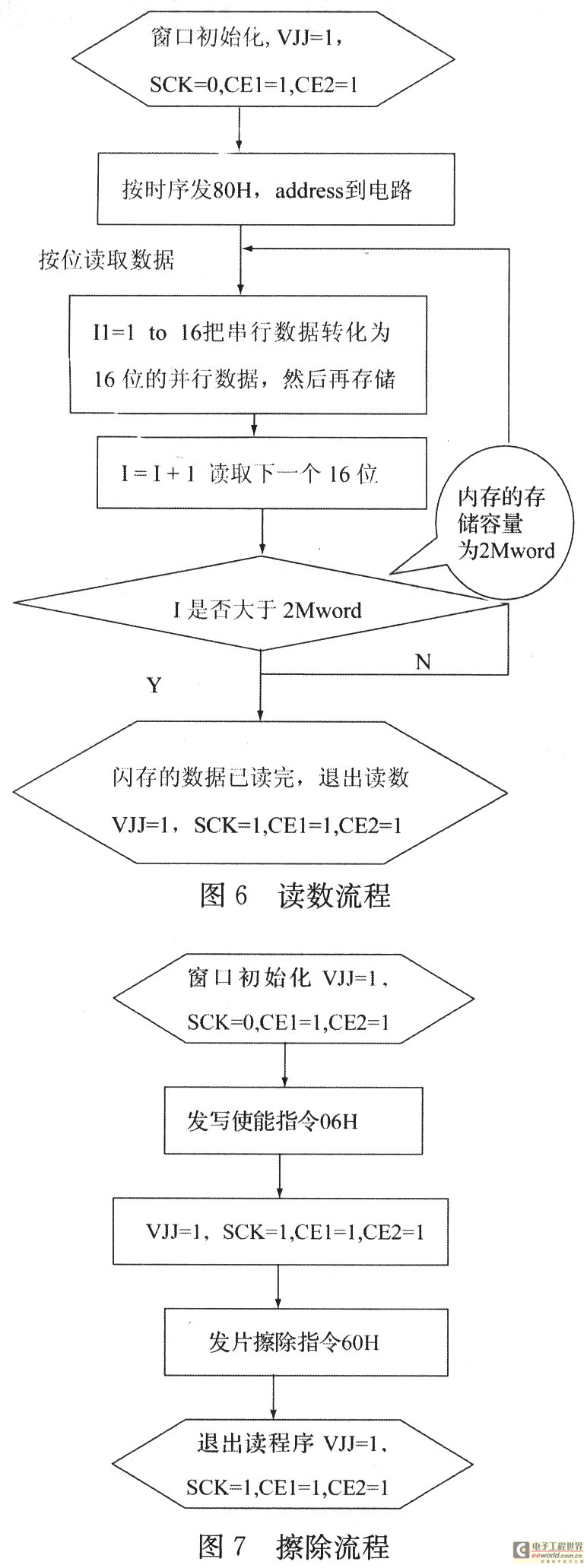
投影機位置計算和吊裝技巧
CP-310t 電動變焦鏡頭 投影距離 屏幕尺寸 最
2010-02-06 09:55:19449 電機轉(zhuǎn)速 和轉(zhuǎn)子位置的測量在電機交直流調(diào)速控制系統(tǒng)中占有重要的位置,為提高測量的精度和避免噪聲影響,多采用數(shù)字式測量方法。基于常規(guī)的M/ T 法,提出了電機轉(zhuǎn)速和轉(zhuǎn)子位置測量
2011-07-06 17:04:34166 提出一種用于異步電機位置控制的模糊神經(jīng)網(wǎng)絡(luò)(fuzzy neural network ,FNN) 控制器。其控制系統(tǒng)采用Sugeno 型FNN 和比例積分(proportional integrate , PI) 控制進行構(gòu)建。在進行試驗測試之前,利用實驗
2011-09-26 14:35:5032 永磁交流同步直線電機位置伺服控制系統(tǒng)設(shè)計
2016-04-26 11:02:0115 電磁發(fā)射用直線感應(yīng)電機位置檢測系統(tǒng)_何娜
2017-01-08 12:03:281 基于改進反電勢積分的永磁同步電機位置檢測_劉剛
2017-01-08 13:38:539 基于終端滑模負載觀測器的永磁同步電機位置系統(tǒng)反步控制_方一鳴
2017-01-08 13:49:171 在本系列中,到目前為止,我們已經(jīng)討論了針對電機位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。這些是使用基于RS-485
2017-04-26 12:08:111554 電機位置編碼器廣泛用于伺服驅(qū)動器、機器人、機床、印刷機、紡織機和電梯等工業(yè)電機控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2017-04-26 13:16:121280 在本博客系列的第一部分,Martin Staebler提供了各類電機位置編碼器及其接口的概述。在第二部分中,筆者將對雙向/串行/同步(BiSS)位置編碼器的接口進行講解。BiSS是來自iC-Haus公司的開源協(xié)議。它定義了適用于致動器和傳感器(如旋轉(zhuǎn)編碼器或位置編碼器)的數(shù)字雙向串行接口。
2017-04-26 13:24:381184 電機位置編碼器廣泛用于伺服驅(qū)動器、機器人、機床、印刷機、紡織機和電梯等工業(yè)電機控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2017-11-17 01:53:522549 在本系列中,到目前為止,我們已經(jīng)討論了針對電機位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485
2017-11-17 01:56:011073 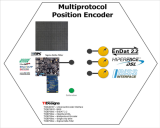
在高精度的電機位置控制中,位置測量直接影響著控制系統(tǒng)的控制精度。在本系統(tǒng)中,光柵尺是超聲波電機位移測量的關(guān)鍵部件。因此,對光柵尺輸出信號進行檢測與處理是電機位置閉環(huán)控制的重要組成部分。數(shù)字信號處理器
2018-02-02 15:39:002 系統(tǒng)哈密頓函數(shù),通過反饋耗散方法對永磁同步直線電機進行速度控制器設(shè)計,保證了系統(tǒng)在穩(wěn)態(tài)運行點達到輸入/輸m能量的動態(tài)平衡。為了提高系統(tǒng)響應(yīng)性能,提出了阻尼參數(shù)PID自整定方法實現(xiàn)阻尼參數(shù)的白調(diào)節(jié),并通過設(shè)計位置控制外環(huán)構(gòu)成
2018-03-01 14:00:4212 電機控制系統(tǒng)中的電機位置信息采集技術(shù)
2018-08-22 00:20:003916 本文檔的主要內(nèi)容詳細介紹的是高精度低慣量小體積的11HS系列電機的數(shù)據(jù)手冊免費下載。
2019-06-03 08:00:001 一諾基業(yè)總經(jīng)理郭勇在會議上發(fā)表以《機器人如何實現(xiàn)高速精準的裝配》為主題的演講。
2019-06-17 09:02:463538 額定電壓(電流)驅(qū)動:參見前文《步進電機的靜態(tài)轉(zhuǎn)矩特性及測量方法》一文的下圖,從額定電壓降低電壓來驅(qū)動步進電機,發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002134 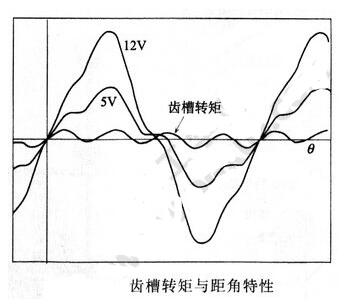
在分析直線電機位置控制存在問題的基礎(chǔ)上,實現(xiàn)了直線電機精準位置控制。將Matlab和DSP完美地結(jié)合起來,完成了在Matlab/Simulink中創(chuàng)建M文件,編譯生成DSP代碼,從而達到直線電機精準位置
2019-10-23 17:20:2623 顧名思義,無刷直流電機沒有電刷觸點,需要使用電機位置傳感器(MPS)來測量定子與轉(zhuǎn)子之間的相對位置,以確保定子線圈按正確順序通電。電機位置傳感器在啟動時至關(guān)重要,因為此時微控制器沒有可用的反電動勢來確定轉(zhuǎn)子和定子的相對位置。
2020-05-04 16:57:006169 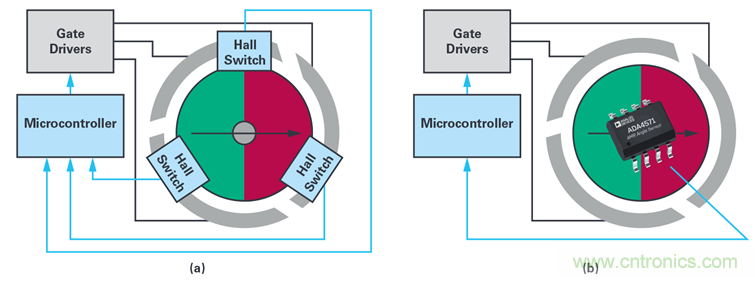
什么是雙AMR電機位置傳感器?它有什么作用?本文就我們在朝著半自動駕駛和全自動駕駛發(fā)展期間出現(xiàn)的汽車電氣化趨勢,尤其是,為了讓電子轉(zhuǎn)向助力(EPS)和電子制動系統(tǒng)滿足必要的安全標準,以確保無人駕駛汽車的安全性和可靠控制時需要作出的改變提供一些見解。
2020-05-24 12:02:404197 轉(zhuǎn)子 (3)通過旋轉(zhuǎn)式變壓器 (2)接受一個電壓裝置 (1)的供電 (頻率 = 8kHz)。在定子線圈 (正弦線圈和余弦線圈;5.6)內(nèi),通過感應(yīng)引起與轉(zhuǎn)子位置成比例的電壓。
2020-07-11 10:30:122695 直流無刷電機位置傳感器有:磁敏式、光電式和電磁式三種類型。 使用磁敏式位置傳感器的直流無刷電機,其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉呻娐返龋┍话惭b在一個定子組件上,用于
2020-12-31 10:35:274714 無刷電機位置傳感器有:磁敏式、光電式和電磁式三種類型 使用磁敏式位置傳感器的直流無刷電機,其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉呻娐返?被安裝在一個定子組件上,用于檢測
2021-09-17 11:05:413114 表計本身的應(yīng)用特點,研發(fā)出無磁計量模塊,具備檢測、計量葉輪(部分金屬化)旋轉(zhuǎn)等功能,可廣泛應(yīng)用于水表、氣表、熱表等領(lǐng)域。小體積,大能量★ 高度集成,精準計量,可靠穩(wěn)定 ★??低功耗延長使用壽命??當前
2021-12-08 15:50:061205 
的換向角進行調(diào)制,以產(chǎn)生最大的扭矩輸出。轉(zhuǎn)子位置可以通過安裝在電機軸上的絕對位置編碼器來確定。本文將解釋如何使用VFD測量PM電機的轉(zhuǎn)子位置以及與編碼器位置錯誤相關(guān)的一些常見問題。
2022-01-23 10:13:28635 本文基于光模塊標準和需求出發(fā),介紹了TI多款小體積電源產(chǎn)品在光模塊里的應(yīng)用及其在光模塊應(yīng)用場景下的注意事項。
2022-02-15 13:36:352365 
超級網(wǎng)口 USR-K7 是一款全新,小體積的串口轉(zhuǎn)以太網(wǎng)模塊,用來將 TCP/UDP 數(shù)據(jù)包與 UART 接口實現(xiàn) 數(shù)據(jù)透傳傳輸?shù)脑O(shè)備。搭載 ARM 公司的 Cortex-M4 處理器,功耗低,速度快,穩(wěn)定性高。
2022-07-23 09:21:090 小體積電源在光模塊里的應(yīng)用指導(dǎo)
2022-10-28 11:59:573 3D 霍爾效應(yīng)傳感器如何在自治系統(tǒng)中實現(xiàn)精準的實時位置控制
2022-10-28 12:00:050 工程復(fù)合磁芯使電感器制造商可將大電感集成到小體積中。FlakeComposite新技術(shù)將磁芯性能提升到了一個新的水平,并增加了額外的機械彈性,可支持新型的超薄器件。
2022-11-03 18:00:543081 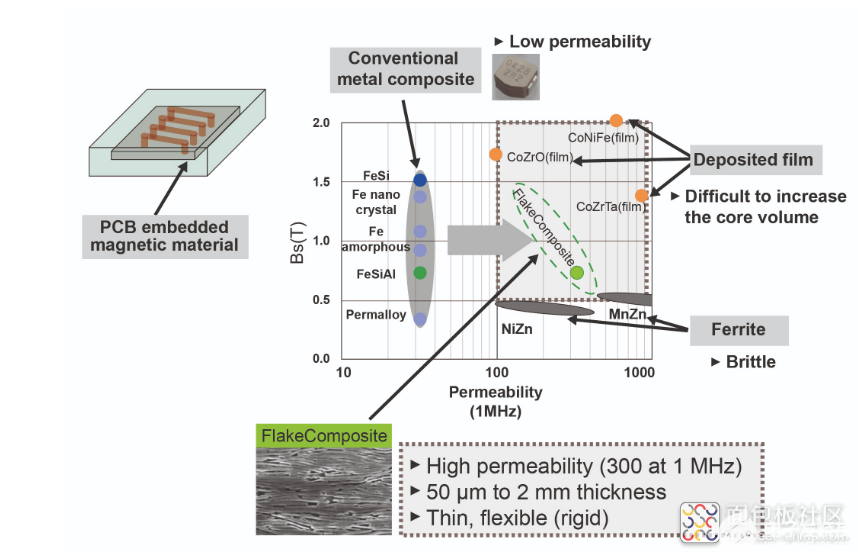
電子發(fā)燒友網(wǎng)站提供《帶按鈕的Arduino控制伺服電機位置.zip》資料免費下載
2022-11-07 15:04:253 電子發(fā)燒友網(wǎng)站提供《直流電機位置控制開源分享.zip》資料免費下載
2022-11-07 09:16:312 金升陽推出K12MT系列小體積非隔離POL電源
2022-12-08 19:55:47259 電子發(fā)燒友網(wǎng)站提供《從SD卡獲取伺服電機位置.zip》資料免費下載
2023-01-31 10:17:080 本文將介紹“無刷電機位置傳感器的作用及其布局”相關(guān)的內(nèi)容,這也是在“無刷電機有傳感器驅(qū)動和無傳感器驅(qū)動的特征及區(qū)分使用”中“無刷電機有位置傳感器的驅(qū)動”應(yīng)注意的要點。在無刷電機使用的位置傳感器通常是磁傳感器(霍爾元件,霍爾IC)。
2023-02-15 16:12:071862 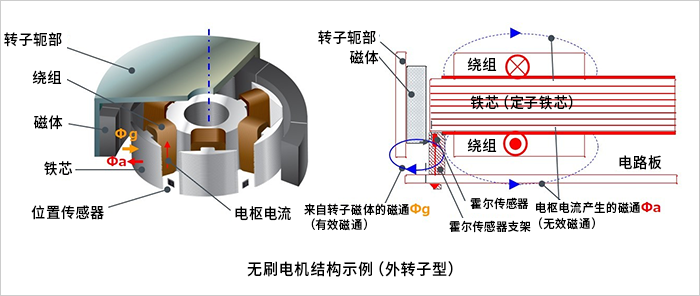
基于ADRC的永磁同步電機位置環(huán)控制 原理 仿真 總結(jié) 原理 位置環(huán)ADRC: 仿真位置環(huán)內(nèi)部:ESO內(nèi)部:參數(shù)設(shè)置:轉(zhuǎn)速環(huán):電流環(huán):電機參數(shù):螺旋槳模塊(查表法):此外螺旋槳加不加都可以,看情況
2023-03-14 09:33:071 65---觸摸屏控制步進電機位置實驗:
硬件需求:PC機,PCM模塊一個,microUSB線,5V/0.5A直流電源,12V/1A直流電
源,42步進電機1個,A4988步進電機驅(qū)動器一個,導(dǎo)線
2023-03-24 10:35:030 本篇來介紹電機的位置環(huán)控制,實現(xiàn)電機快速準確地轉(zhuǎn)動到指定位置。回顧上篇,電機速度PID控制的結(jié)構(gòu)圖如下,目標值是設(shè)定的速度,通過編碼器獲取電機的轉(zhuǎn)速作為反饋,實現(xiàn)電機轉(zhuǎn)速的控制。再來看電機位置PID
2023-05-06 11:50:367 編輯:谷景電子不知道你是否也想過關(guān)于電感的這樣一個問題——電感類型這么多,是否有小體積大感值的電感?它的體積和感值之間有關(guān)系嗎?影響電感感值的與體積大小的因素有哪些?今天咱們就來一起了解一下這些
2021-09-07 18:52:35718 
(1)在數(shù)控機床中,伺服電機位置模式常用于驅(qū)動進給軸。通過位置模式,可以實現(xiàn)對切削工具的精確位置控制,以實現(xiàn)高精度的加工操作。 (2)在自動化生產(chǎn)線中,伺服電機位置模式常用于驅(qū)動定位裝置、機械
2023-08-15 08:25:01491 SHIKUES時科小體積大能量,BTA12A雙向可控硅
2023-09-05 15:49:45327 
基于步進電機驅(qū)動原理,對步進電機驅(qū)動方式進行分析,提出了基于西門子S7-1200系列PLC的步進電機位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計。通過測試,該裝置能對位置進行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運動控制教學(xué)實訓(xùn),在自動化裝置中有較好的推廣價值。
2023-10-23 14:38:162664 
無磁鐵雙線圈技術(shù)為機器人、工業(yè)和醫(yī)療設(shè)備中使用的電機位置傳感器及編碼器帶來高分辨率、高精度和高可靠性
2023-10-27 10:00:55541 在高集成度的控制系統(tǒng)上,電源模塊體積越做越小,但是小體積難以做到大功率。為滿足需求,致遠電子推出一款小體積、大功率寬壓輸入電源模塊,擁有比1W/3W產(chǎn)品更高的功率,比普通6W/10W產(chǎn)品更小的體積
2023-10-31 08:25:39242 
SUNLORDINC順絡(luò)新研發(fā)新的小體積熱敏電阻以及方案應(yīng)用
2023-10-31 16:18:30231 
三相全波無刷電機(BLDC)的位置檢測是其運行控制中至關(guān)重要的環(huán)節(jié)。位置檢測確保電機的電子換向系統(tǒng)能夠準確地控制定子繞組的通電順序,從而產(chǎn)生正確的旋轉(zhuǎn)磁場以驅(qū)動轉(zhuǎn)子旋轉(zhuǎn)。在無刷電機中,這一功能通常
2024-02-05 17:58:34935 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論