算法的原理,然后帶大家使用FPGA來實(shí)現(xiàn)(C語言實(shí)現(xiàn)過程特別簡單)。 二. PID算法 PID取自比例、積分、微分三個(gè)英文字母的首字母。意味著算法由這三部分組成。 1. P 比例 ????運(yùn)算過程為 期望值 減去 當(dāng)前值 ,然后再乘上一個(gè)p系數(shù),就得到了一個(gè)反
2023-07-20 09:23:12 1220
1220 
這方面的需求而設(shè)計(jì)的。專家算法和模糊算法都?xì)w屬于智能算法的范疇,智能算法最大的優(yōu)點(diǎn)就是在控制模型未知的情況下,可以對(duì)模型進(jìn)行控制。這里需要注意的是,專家PID 也好,模糊 PID 也罷,絕對(duì)不
2021-07-19 06:29:49
已經(jīng)知道了,P,I,D是三種不同的調(diào)節(jié)作用,既可以單獨(dú)使用(P,I,D),也可以兩個(gè)兩個(gè)用(PI,PD),也可以三個(gè)一起用(PID)。關(guān)于PID原理應(yīng)用的文章:PID控制在無人機(jī)中的應(yīng)用。 這三種作用
2022-12-30 09:35:33
人們的首選。下面簡單來講解一下PID算法:首先PID算法是有比例,積分,微分三部分組成,先說下比例部分,所謂比例部分,就是呈線性關(guān)系,舉個(gè)例子,一個(gè)電熱絲加熱水,開始的時(shí)候溫度很低,離50℃很大,這時(shí)應(yīng)該加大...
2021-07-15 09:44:13
目錄一. 緒論二. 角度環(huán)串級(jí)PID原理1. PID基本算法2. 姿態(tài)角串級(jí)PID原理三. 如何用STM32實(shí)現(xiàn)角度-角速度的串級(jí)PID控制1. PID算法的代碼實(shí)現(xiàn)2. 串級(jí)PID算法的代碼實(shí)現(xiàn)四
2021-08-17 06:44:18
這里的PID是指控制類的比例-積分-微分算法,而不是進(jìn)程ID號(hào)。PID算法,不管是原理上,還是代碼上都比較簡單。主要運(yùn)用在電機(jī)控制、開關(guān)電源、電源管理芯片等領(lǐng)域。一般《自動(dòng)控制原理》上給的是位置式
2021-09-13 06:01:25
對(duì)PID算法的愚見PID算法名字中的三個(gè)字母其實(shí)是此算法的三個(gè)核心系數(shù):? P: 比例系數(shù)? I : 積分系數(shù)? D: 微分系數(shù)比例系數(shù)在只有比例系數(shù)的控制下,如果我們要讓四旋翼懸浮在100cm高度
2019-07-24 02:23:51
問題了,在我所接觸的控制算法當(dāng)中,PID 控制算法又是最簡單,最能體現(xiàn)反饋思想的控制算法,可謂經(jīng)典中的經(jīng)典。經(jīng)典的未必是復(fù)雜的,經(jīng)典的東西常常是簡單的,而且是最簡單的,想想牛頓的力學(xué)三大定律吧,想想
2022-02-09 07:56:11
(pid.err)>200);index=0;;}else;index=1;;pid.sumerr+=pid這是什么意思呢?特別是abs()pid.err是什么啊在算法中
2015-08-06 10:13:41
幾乎沒有一種控制算法比?PID?調(diào)節(jié)規(guī)律更有效、更方便的了。現(xiàn)在一些時(shí)髦點(diǎn)的調(diào)節(jié)器基本源自?PID?。甚至可以這樣說:?PID?調(diào)節(jié)器是其它控制調(diào)節(jié)算法的MOM。 PID解決了自動(dòng)控制理論所要
2016-03-23 10:10:07
PID調(diào)節(jié)是自動(dòng)控制領(lǐng)域的經(jīng)典算法。主要有三個(gè)參數(shù),即P:比例系數(shù)。I:積分系數(shù)。D:微分系數(shù)。在PID調(diào)節(jié)過程中我們需要知道兩個(gè)值:1、系統(tǒng)當(dāng)前狀態(tài)值(即反饋),即電機(jī)轉(zhuǎn)速的實(shí)際值。2、期望值。即
2021-09-07 06:38:00
名稱為“溫控儀”的儀表都能將溫度控制到你所期望到達(dá)的水平,選擇需謹(jǐn)慎。⑥所有數(shù)字調(diào)節(jié)器均P、I、D功能,但并不是所有工況都同時(shí)用到這三個(gè)功能,PID功能的選用參見下表 被控制的變量 PID調(diào)節(jié)器選擇 溫度
2018-01-04 21:14:24
使用“梯形圖”來編程,PLC是一種更加現(xiàn)代化的工具。目前的PLC具有基本的PID控制功能。PID調(diào)節(jié)器用于生產(chǎn)過程控制,隨著控制技術(shù)的發(fā)展,調(diào)節(jié)器PID控制算法突飛猛進(jìn),在復(fù)雜過程控制中效果優(yōu)異。PID
2018-01-06 14:21:54
PID調(diào)節(jié)是什么?
2021-11-10 07:26:52
從6月份開始因?yàn)殡娰愰_始接觸PID算法,到現(xiàn)在也算是有了一些經(jīng)驗(yàn)和收獲,馬上要電賽了,對(duì)單級(jí)PID做一個(gè)總結(jié)。再就是總結(jié)一下PID的調(diào)節(jié)的經(jīng)驗(yàn)。我就不說高大上的定義,談?wù)勎覍?duì)PID算法的理解吧
2022-01-14 09:03:32
數(shù)值pid的計(jì)算:6.問題Kp,Ti,Td三個(gè)參數(shù)的設(shè)定是PID控制算法的關(guān)鍵問題。一般說來編程時(shí)只能設(shè)定他們的大概數(shù)值,并在系統(tǒng)運(yùn)行時(shí)通過反復(fù)調(diào)試來確定最佳值。因此調(diào)試階段程序須得能隨時(shí)修改和記憶
2015-12-28 23:01:17
常用的控制算法有哪幾種?分別有何特點(diǎn)?PID控制算法的基本思想是什么?PID算法是如何形成的?
2021-12-21 07:05:49
PID控制算法的原理是什么?PID控制算法有哪些應(yīng)用?
2021-10-11 09:33:23
常用的控制算法有哪幾種?各自有什么特點(diǎn)?PID控制算法的基本思想是什么?PID控制算法是如何形成的?
2021-06-30 06:04:40
前言如何學(xué)習(xí)PID控制,最開始需要先拋開各種軟硬件,單純從數(shù)學(xué)上進(jìn)行分析,弄懂底層的控制原理是什么?理解清楚后,無非把數(shù)學(xué)公式變成代碼。剩下就是不斷的實(shí)踐,來確定三個(gè)參數(shù),使控制結(jié)果更加準(zhǔn)確。開始介紹
2022-01-14 09:27:14
1 前言控制系統(tǒng)通常根據(jù)有沒有反饋會(huì)分為開環(huán)系統(tǒng)和閉環(huán)系統(tǒng),在閉環(huán)系統(tǒng)的控制中,PID算法非常強(qiáng)大,其三個(gè)部分分別為;P:比例環(huán)節(jié);I:積分環(huán)節(jié);D:微分環(huán)節(jié);PID算法可以自動(dòng)對(duì)控制系統(tǒng)進(jìn)行準(zhǔn)確且
2021-06-28 09:27:46
三個(gè)環(huán)節(jié)的加和。其功能框圖如下:根據(jù)上圖我們考慮在某個(gè)特定的時(shí)刻t,此時(shí)輸入量為rin(t),輸出量為rout(t),于是偏差就可計(jì)算為err(t)=rin(t)-rout(t)。于是PID的基本控制
2018-04-21 16:58:59
、ourdevBasic PID的經(jīng)典文章、PID測(cè)速、由入門到精通-吃透PID2.0版、容易理解的PID等相關(guān)PID電機(jī)控制內(nèi)容,從PID控制原理延伸到位置式和增量式的PID算法,以及控制器參數(shù)整定的三大方
2019-03-18 14:18:02
PID的比例,積分,微分三個(gè)參數(shù)怎么確定呢?
2016-04-29 16:02:43
單片機(jī)中實(shí)際應(yīng)用的時(shí)候需要操作定時(shí)器一起使用。二.簡單點(diǎn)的控制算法:位式控制算法主要就是控制的時(shí)pwm的脈沖寬度 ,單片機(jī)的話時(shí)ms為單位。圖片來說明:主要的描述也在框圖中表示。三.pid控制的實(shí)現(xiàn)需要對(duì)負(fù)載傳感器的值不斷的進(jìn)行檢測(cè),并且有的開關(guān)器件如可控硅二極管就可以運(yùn)用在其中來進(jìn)行控制(沒
2022-01-14 07:33:33
去年弄了一陣子Labview,因?yàn)橐玫?b class="flag-6" style="color: red">PID算法,然后寫了一個(gè)小小的測(cè)試程序,另外加上本人對(duì)于PID的理解,希望能對(duì)初學(xué)者有幫助,若有誤導(dǎo),請(qǐng)多多指教實(shí)際調(diào)試:我們假設(shè)要調(diào)節(jié)的目標(biāo)值為10,初始值
2017-04-12 18:14:15
STM32的PID算法的電源調(diào)節(jié)指導(dǎo)
2016-04-23 11:20:54
上一篇介紹了建立系統(tǒng)模型的三種方法,這一篇介紹如何調(diào)節(jié)pid,并用MATLAB仿真調(diào)節(jié)pid的目標(biāo)就是使得從模型中得到的增益能夠使物理系統(tǒng)正常工作調(diào)節(jié)pid的理論分析pid的一般形式如下圖經(jīng)過移動(dòng)
2021-09-01 07:24:40
電子發(fā)燒友總結(jié)了以“PID算法”為主題的精選干貨,今后每天一個(gè)主題為一期,希望對(duì)各位有所幫助!(點(diǎn)擊標(biāo)題即可進(jìn)入頁面下載相關(guān)資料)電子書資料:PID算法高手的經(jīng)驗(yàn)總結(jié)與調(diào)試圖解(附代碼)視頻教學(xué)資料
2019-05-30 19:32:08
時(shí)k=-1。
步進(jìn)式PID雖然可以減少階躍信號(hào)帶來的干擾,但是也會(huì)讓系統(tǒng)的響應(yīng)速度變慢,可以調(diào)節(jié)步長來平衡兩者之間的關(guān)系。步長越小運(yùn)行越穩(wěn)定,系統(tǒng)響應(yīng)速度越慢,反之亦然。
三、PID算法優(yōu)化
01
積分
2023-12-22 15:38:41
什么是PID控制算法呢?PID控制算法有何作用?PID控制算法有哪幾種類型呢?如何對(duì)其進(jìn)行測(cè)試?
2022-02-25 07:36:44
什么是PID控制算法?PID控制算法C語言是如何實(shí)現(xiàn)的?特殊情況下的控制算法該如何去調(diào)整?比例、積分、微分三個(gè)環(huán)節(jié)的控制作用分別是什么?
2021-06-29 09:24:32
什么是PID?PID控制器主要有哪些應(yīng)用?位置式PID與增量式PID的區(qū)別在哪?位置式PID優(yōu)缺點(diǎn)有哪些?增量式PID優(yōu)缺點(diǎn)有哪些?
2021-07-13 08:13:27
前文對(duì)PID算法離散化和增量式PID算法原理進(jìn)行來探索,之后又使用Matlab進(jìn)行了仿真實(shí)驗(yàn),對(duì)PID三個(gè)參數(shù)又有了更深入的認(rèn)識(shí),接下來我們來使用C語言進(jìn)行PID算法實(shí)現(xiàn),并且結(jié)合控制電機(jī)的項(xiàng)目來
2021-09-15 09:20:04
前文對(duì)PID算法離散化和增量式PID算法原理進(jìn)行來探索,之后又使用Matlab進(jìn)行了仿真實(shí)驗(yàn),對(duì)PID三個(gè)參數(shù)又有了更深入的認(rèn)識(shí),接下來我們來使用C語言進(jìn)行PID算法實(shí)現(xiàn),并且結(jié)合控制電機(jī)的項(xiàng)目來深入學(xué)習(xí)。
2021-09-16 09:11:08
在調(diào)節(jié)倒立擺時(shí)如何將精密電位器的角度值與電機(jī)的pwm調(diào)節(jié)聯(lián)系起來,想通過增量式pid算法調(diào)節(jié)倒立擺。還有,pid參數(shù)調(diào)節(jié)有沒有相關(guān)軟件,麻煩推薦一下。O(∩_∩)O謝謝!!!
2017-07-27 10:47:46
:這篇文章分為三個(gè)部分:PID原理普及常用四軸的兩種PID算法講解(單環(huán)PID、串級(jí)PID)如何做到垂直起飛、四軸飛行時(shí)為何會(huì)飄、如何做到脫控?PID原理普及1、對(duì)自動(dòng)控制系統(tǒng)的基本要求:穩(wěn)、準(zhǔn)、快:穩(wěn)定性(P
2018-07-14 14:34:29
流程圖 PID控制算法采用位置式數(shù)字PID控制: 式(7)中u(t)為PID輸出值,e(t)為期望值與實(shí)際值之差,為積分量,為微分量,kp,、ki、kd。為比例、積分、微分系數(shù)。在將積分量,微分量離散化
2016-01-15 17:03:00
盡快進(jìn)入狀態(tài)。特地分享一些自己如何實(shí)現(xiàn)的過程。首先說說增量式PID的公式,這個(gè)關(guān)系到MCU算法公式的書寫,實(shí)際上兩個(gè)公式的寫法是同一個(gè)公式變換來得,不同的是系數(shù)的差異。資料上比較多的是:還有一種的算法是:這里主要介紹第二種,具體會(huì)分析比例、積分、微分三個(gè)環(huán)節(jié)...
2021-09-13 06:54:20
運(yùn)用PID很多年,分享一下快速調(diào)節(jié)PID的經(jīng)驗(yàn)~~~~
2013-12-03 00:02:44
。當(dāng)采用PID控制器還達(dá)不到工藝要求,則需要考慮其它的控制方案。如串級(jí)控制、前饋控制、大滯后控制等。5、公式:數(shù)值pid的計(jì)算:6、問題。Kp,ti,Td三個(gè)參數(shù)的設(shè)定是PID控制算法的關(guān)鍵問題
2019-05-30 08:30:00
補(bǔ)充一下,他們的視頻真的把我看哭了以下是對(duì)于PID控制/算法的理解、總結(jié):1.PID算法有什么好?首先說為什么要用PID算法,咱們使用單片機(jī)直接電平控制多簡單,它不香嗎?在這里咱們可以提出一個(gè)場(chǎng)景:現(xiàn)在你要控制小車行駛到距離它100米的一條線上停下來,你會(huì)怎么做?不會(huì)PID算法的人就會(huì)說了,小車的
2022-01-14 08:46:36
,則需要考慮其它的控制方案。如串級(jí)控制、前饋控制、大滯后控制等。 5,公式: 數(shù)值pid的計(jì)算: 6,問題。Kp,Ti,Td三個(gè)參數(shù)的設(shè)定是PID控制算法的關(guān)鍵問題。一般說來編程時(shí)只能設(shè)定他們的大概
2016-01-26 17:51:45
:(simulink)可以清晰的看到三個(gè)部分:Kp(比例部分):可以減少系統(tǒng)的穩(wěn)態(tài)誤差但不能消除它徹底,可以減少系統(tǒng)飛上升時(shí)間。Ki(積分環(huán)節(jié)):可以徹底消除穩(wěn)態(tài)誤差但是會(huì)使系統(tǒng)的瞬態(tài)響應(yīng)變的更不穩(wěn)定。Kd
2016-01-29 16:50:21
這是在公眾號(hào)上看到的一篇文章,整理了一下,為后面看方便。PID算法1 什么是PIDPID,即比例Proportion、積分Integral和微分Derivative三個(gè)單詞的縮寫。閉環(huán)自動(dòng)控制技術(shù)
2020-06-22 11:37:44
微型計(jì)算機(jī)實(shí)驗(yàn)報(bào)告目錄實(shí)驗(yàn)一A/D與D/A轉(zhuǎn)換1實(shí)驗(yàn)二數(shù)字濾波器4實(shí)驗(yàn)三離散化方法研究7實(shí)驗(yàn)四數(shù)字PID調(diào)節(jié)器算法的研究12實(shí)驗(yàn)五串級(jí)控制算法的研究17實(shí)驗(yàn)六解耦控制算法的研究21實(shí)驗(yàn)七最少拍控制
2021-09-10 06:56:32
數(shù)字式PID調(diào)節(jié)算法的具體工作原理是什么?
2022-02-11 08:11:52
調(diào)節(jié)法的優(yōu)缺點(diǎn)(好像這種方法只能給一個(gè)調(diào)節(jié)的大概位置,具體參數(shù)值還得繼續(xù)做實(shí)驗(yàn)調(diào)出來)4、頻率響應(yīng)法設(shè)計(jì)PID參數(shù)的優(yōu)缺點(diǎn)?5、以及還存在哪些高效實(shí)用的PID參數(shù)調(diào)節(jié)方法?熱忱歡迎懂PID控制的知友討論。上述問題如若表述有誤,還請(qǐng)指出來修正。補(bǔ)充:暫且定一個(gè)標(biāo)準(zhǔn):最大過調(diào)量小于10%,調(diào)整時(shí)間0.5秒以內(nèi)!
2018-07-30 10:29:20
信號(hào)控制被控量,而控制器本身就是比例、積分、微分三個(gè)環(huán)節(jié)的加和。這里我們規(guī)定(在t時(shí)刻):1.輸入量為2.輸出量為3.偏差量為 PID算法的數(shù)字離散化假設(shè)采樣間隔為T,則在第K個(gè)T時(shí)刻:偏差= 積分
2019-10-14 08:00:00
PID控制算法。 位置式PID控制算法的缺點(diǎn):當(dāng)前采樣時(shí)刻的輸出與過去的各個(gè)狀態(tài)有關(guān),計(jì)算時(shí)要對(duì)e(k)進(jìn)行累加,運(yùn)算量大;而且控制器的輸出u(k)對(duì)應(yīng)的是執(zhí)行機(jī)構(gòu)的實(shí)際位置,如果計(jì)算機(jī)出現(xiàn)故障,u(k
2016-01-15 18:35:33
本文主要是分享資料,講解不會(huì)太多,因?yàn)榉窒淼馁Y料里面就有具體的詳細(xì)解析,而且百度上面也有詳細(xì)的資料,所以本次博文主要是講解我用PID算法調(diào)溫的經(jīng)驗(yàn)。PID算法調(diào)整溫度最大的問題的溫度的上升問題以及
2021-11-23 08:27:08
,KD=0 KP=1,KI=0,KD=0 KP=10,KI=0,KD=0 這三個(gè)效果 那個(gè)更好呢? 還有就是需要將KP調(diào)節(jié)到什么程度才能調(diào)節(jié)ki kd?
2019-07-17 02:49:16
四軸的串級(jí)pid調(diào)試,在調(diào)內(nèi)環(huán)的時(shí)候,外環(huán)pid的三個(gè)參數(shù)是怎么設(shè)置?遙控器給的控制是給在外環(huán)上,那我現(xiàn)在要調(diào)節(jié)內(nèi)環(huán)的參數(shù),是應(yīng)把外環(huán)pid的三個(gè)參數(shù)設(shè)置為0,還是什么?麻煩解答下,謝謝。
2019-08-06 03:56:06
增量式pid中的kpkikd對(duì)應(yīng)位置式的中的pi d 的值嗎,調(diào)節(jié)增量式pid遇到的問題,請(qǐng)問如何調(diào)節(jié)增量式pid?感謝。
2023-11-09 07:27:41
PID調(diào)節(jié)的實(shí)質(zhì)是什么?
經(jīng)常看到有關(guān)PID調(diào)節(jié)問題書籍,看來看去看不懂他們?cè)僬f什么。還有一些技術(shù)員一提起PID調(diào)節(jié),就搖頭,搞不懂呀!那么PID調(diào)節(jié)的實(shí)質(zhì)是什么?通俗
2009-07-04 08:34:22 126
126 本文利用二次蟻群算法求解PID 參數(shù)整定的優(yōu)化問題,使PID 參數(shù)尋優(yōu)速度更快,同時(shí)又避免了一次蟻群算法在循環(huán)足夠的次數(shù)后,優(yōu)化速度已經(jīng)很小的缺點(diǎn),能夠快速、準(zhǔn)確地獲
2009-08-18 11:42:2116 PID控制器是一種最優(yōu)控制。本文講述了增量式PID算法原理與數(shù)字PID算法原理與數(shù)字PID算法程序,詳細(xì)講解了什么是pid算法。
2012-01-01 11:58:2110606 
PID控制原理和特點(diǎn) 工程實(shí)際中,應(yīng)用最為廣泛調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今已有近70年歷史,它以其結(jié)構(gòu)簡單、穩(wěn)定性好、工
2012-09-09 09:45:35194481 
傳統(tǒng)的PID控制對(duì)于控制模型不確定并具有非線性特性的對(duì)象時(shí),存在參數(shù)難以整定、控制效果不好的缺點(diǎn),文中提出了一種基于蟻群算法的PID調(diào)節(jié)算法,即利用蟻群算法動(dòng)態(tài)調(diào)節(jié)PID的參
2012-10-10 14:43:3559 PID調(diào)節(jié)的通俗化理解 用于APM,PID,調(diào)節(jié)。
2016-03-16 09:28:153 基于PID算法的溫度控制系統(tǒng),PID算法溫控C語言程序
2016-07-12 16:05:5248 PID原理與C語言算法小合集,包含PID原理講解與不同形式PID的C語言程序源碼
2016-07-12 16:05:5232 從傳統(tǒng)PID 的原理出發(fā),分析了它的優(yōu)缺點(diǎn)。利用非線性機(jī)制來開發(fā)了一些具有特殊功能的環(huán)節(jié):跟蹤微分器(TD),擴(kuò)張狀態(tài)觀測(cè)器(ESO),非線性PID(NPID)等,并以此組合出高品質(zhì)的新型控制器- 自抗擾控制器(ADRC),從而形成了新的“自抗擾控制”技術(shù)。新型的控制器具有算法簡單、參數(shù)易于調(diào)節(jié)的特點(diǎn)。
2016-09-13 17:23:2828 PID調(diào)節(jié)控制電機(jī)
2016-11-17 18:35:2312 PID算法實(shí)現(xiàn)C語言(位置式PID)STCunio數(shù)字電源帶PID數(shù)字閉環(huán)結(jié)合51單片機(jī)arduino完成步進(jìn)電機(jī)增量式PID-STM32實(shí)現(xiàn)
2016-12-17 11:58:5620 1。PID是一種控制算法,是比例作用P、積分作用I、和微分作用D的總稱。這三個(gè)作用可合成和分離成PI、PD,和PID這幾個(gè)作用。
2017-08-18 15:36:0615186 四軸飛行器的PID控制算法介紹
2017-08-29 14:57:2650 想進(jìn)一步了解 PID 控制器,必須首先熟悉PID 算法,這也是筆者為什么在下面的內(nèi)容里大費(fèi)周章討論這個(gè)問題的原因所在。 PID 控制器調(diào)節(jié)輸出,是為了保證偏差值(e 值)為零,使系統(tǒng)達(dá)到一個(gè)預(yù)期穩(wěn)定狀態(tài)。這里的偏差(e)是給定值(SP)和過程變量值(PV)的
2017-11-21 17:03:0428 通過調(diào)整比例、積分和微分三項(xiàng)參數(shù),使得大多數(shù)的工業(yè)控制系統(tǒng)獲得良好的閉環(huán)控制性能。通常依據(jù)控制器輸出與執(zhí)行機(jī)構(gòu)的對(duì)應(yīng)關(guān)系,將基本數(shù)字PID算法分為位置式PID和增量式PID兩種。
2017-11-24 14:20:3196318 PID調(diào)節(jié)規(guī)律是自動(dòng)控制系統(tǒng)中常見而典型的控制策略,其中模擬式PID器是最基本的實(shí)現(xiàn)手段與方式。它由比例、積分、微分三種基本電路所構(gòu)成。根據(jù)不同的需求可構(gòu)成比例(P)調(diào)節(jié)、比例積分(PI)調(diào)節(jié)、比例微分(PD)調(diào)節(jié)、比例積分微分(PID)調(diào)節(jié)電路。
2017-11-24 17:34:2322664 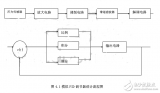
本文檔的主要內(nèi)容詳細(xì)介紹的是PID程序算法的詳細(xì)資料概述免費(fèi)下載
2018-07-24 08:00:0036 ;?? ?printf("PID_init end \n");}統(tǒng)一初始化變量,尤其是Kp,Ki,Kd三個(gè)參數(shù),調(diào)試過程當(dāng)中,對(duì)于要求的控制效果,可以通過調(diào)節(jié)這三個(gè)量直接進(jìn)行調(diào)節(jié)。第三步:編寫控制算法,代碼
2018-08-13 15:03:451104 ;?? ?printf("PID_init end \n");}統(tǒng)一初始化變量,尤其是Kp,Ki,Kd三個(gè)參數(shù),調(diào)試過程當(dāng)中,對(duì)于要求的控制效果,可以通過調(diào)節(jié)這三個(gè)量直接進(jìn)行調(diào)節(jié)。第三步:編寫控制算法,代碼
2018-08-13 15:04:01338 從傳統(tǒng) PID 的原理出發(fā), 分析了它的優(yōu)缺點(diǎn)。利用非線性機(jī)制來開發(fā)了一些具有特殊功能的環(huán)節(jié):跟蹤微分器(TD), 擴(kuò)張狀態(tài)觀測(cè)器(ESO), 非線性 PID(NPID)等, 并以此組合出高品質(zhì)
2018-11-06 08:00:000 本文檔的主要內(nèi)容詳細(xì)介紹的是數(shù)字PID控制算法教程之如何對(duì)標(biāo)準(zhǔn)PID算法進(jìn)行改進(jìn)主要內(nèi)容包括了:對(duì)標(biāo)準(zhǔn)PID算法的改進(jìn),飽和問題及其抑制,數(shù)字濾波,Smith
2018-12-04 08:00:0015 本文主要介紹了PID控制器的優(yōu)缺點(diǎn)及作用。PID控制適應(yīng)性好,有較強(qiáng)的魯棒性,對(duì)各種工業(yè)場(chǎng)合,都可在不同的程度上應(yīng)用。特別適于“一階慣性環(huán)節(jié)+純滯后”和“二階慣性環(huán)節(jié)+純滯后”的過程控制對(duì)象。
2019-07-18 15:17:1946612 經(jīng)常看到有關(guān)PID調(diào)節(jié)問題書籍,看來看去看不懂他們?cè)僬f什么。還有一些技術(shù)員一提起PID調(diào)節(jié),就搖頭,搞不懂呀!那么PID調(diào)節(jié)的實(shí)質(zhì)是什么?通俗的概念是什么?我們通過圖1進(jìn)行分析。
2019-08-07 08:00:0013 PID控制應(yīng)該算是應(yīng)用非常廣泛的控制算法了。
2019-08-12 08:39:128951 
1、PID回路控制概述 PID控制器是應(yīng)用最廣泛的閉環(huán)控制器,它根據(jù)給定值與被控實(shí)測(cè)值之間的偏差;按照PID算法計(jì)算出控制器的輸出量,控制執(zhí)行機(jī)構(gòu)進(jìn)行調(diào)節(jié),使被控量跟隨給定量變化,并使系統(tǒng)達(dá)到穩(wěn)定
2020-11-03 16:16:475538 
PID調(diào)節(jié)及PID調(diào)節(jié)的基本原理免費(fèi)下載。
2021-04-25 15:41:4447 PID調(diào)節(jié)方法講解免費(fèi)下載。
2021-05-25 16:01:1862 pid控制三個(gè)參數(shù)怎么調(diào)整?
2021-09-19 09:08:0045711 沒有一種控制算法比PID調(diào)節(jié)規(guī)律更有效、更方便的了。現(xiàn)在一些時(shí)髦點(diǎn)的調(diào)節(jié)器基本源自PID。甚至可以這樣說:PID調(diào)節(jié)器是其它控制調(diào)節(jié)算法的嗎。
2021-10-06 11:18:0018269 從6月份開始因?yàn)殡娰愰_始接觸PID算法,到現(xiàn)在也算是有了一些經(jīng)驗(yàn)和收獲,馬上要電賽了,對(duì)單級(jí)PID做一個(gè)總結(jié)。再就是總結(jié)一下PID的調(diào)節(jié)的經(jīng)驗(yàn)。我就不說高大上的定義,談?wù)勎覍?duì)PID算法的理解
2022-01-14 11:11:063 PID調(diào)節(jié)器是一種常見的控制系統(tǒng),它可以通過對(duì)輸入信號(hào)進(jìn)行處理,控制輸出信號(hào)來維持目標(biāo)參數(shù)的穩(wěn)定性。PID調(diào)節(jié)器的三個(gè)重要參數(shù)如下:
比例系數(shù)(P):比例系數(shù)是PID調(diào)節(jié)器中最基本的參數(shù)
2023-03-25 11:37:2714456 PID調(diào)節(jié)器是一種基于比例-積分-微分(PID)控制算法的自動(dòng)控制系統(tǒng),它通過不斷地調(diào)整控制量,使被控對(duì)象的輸出值逐漸趨近目標(biāo)值,從而實(shí)現(xiàn)自動(dòng)控制。PID調(diào)節(jié)器廣泛應(yīng)用于各種工業(yè)自動(dòng)化控制系統(tǒng)
2023-03-25 11:39:332942
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論