????PID控制應(yīng)該算是非常古老而且應(yīng)用非常廣泛的控制算法了,小到熱水壺溫度控制,大到控制無人機(jī)的飛行姿態(tài)和飛行速度等等。在電機(jī)控制中,PID算法用得尤為常見。 位置式PID 1 計算公式
2023-08-23 09:31:14 2063
2063 
51單片機(jī)用三個開關(guān)控制三個直流電機(jī)要做到現(xiàn)先啟動先停止
2023-10-26 06:09:49
PID-PID控制器參數(shù)整定與實(shí)現(xiàn)
2020-05-12 11:30:36
我做一個恒流源,但是有溫度漂移,想用PID控制。PID參數(shù)怎么整定啊
2013-01-16 17:50:11
PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。昌暉儀表在本文給大家介紹PID控制中P、I、D參數(shù)的作用。
比例作用
比例
2023-06-20 06:50:53
前言如何學(xué)習(xí)PID控制,最開始需要先拋開各種軟硬件,單純從數(shù)學(xué)上進(jìn)行分析,弄懂底層的控制原理是什么?理解清楚后,無非把數(shù)學(xué)公式變成代碼。剩下就是不斷的實(shí)踐,來確定三個參數(shù),使控制結(jié)果更加準(zhǔn)確。開始介紹
2022-01-14 09:27:14
簡單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。當(dāng)被控對象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時,控制理論的其它技術(shù)難以采用時,系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場調(diào)試來
2021-07-02 06:34:44
———————————————————————————————————————————一、序言當(dāng)今的自動控制技術(shù)都是基于反饋的概念。反饋理論的要素包括三個部分:測量、比較和執(zhí)行。測量關(guān)心的變量,與期望值相...
2022-02-23 07:14:28
PD 微分控制PID基本公式1. PID簡介目前工業(yè)自動化水平已成為衡量各行各業(yè)現(xiàn)代化水平的一個重要標(biāo)志。同時,控制理論的發(fā)展也經(jīng)歷了古典控制理論、現(xiàn)代控制理論 和 智能控制理論三個階段。智能控制的典型實(shí)例是模糊全自動洗衣機(jī)等。自動控制系統(tǒng)可分為開環(huán)控制系統(tǒng)和閉環(huán)控制系統(tǒng)。一個
2021-07-01 10:01:17
數(shù)值pid的計算:6.問題Kp,Ti,Td三個參數(shù)的設(shè)定是PID控制算法的關(guān)鍵問題。一般說來編程時只能設(shè)定他們的大概數(shù)值,并在系統(tǒng)運(yùn)行時通過反復(fù)調(diào)試來確定最佳值。因此調(diào)試階段程序須得能隨時修改和記憶
2015-12-28 23:01:17
。PID控制器問世至今已有近70年歷史,它以其結(jié)構(gòu)簡單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。當(dāng)被控對象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時,控制理論的其它技術(shù)難以采用
2016-01-20 15:17:28
PID溫度控制參數(shù)整定的方法是什么?
2021-11-22 06:13:41
PID的比例,積分,微分三個參數(shù)怎么確定呢?
2016-04-29 16:02:43
PID調(diào)節(jié)是自動控制領(lǐng)域的經(jīng)典算法。主要有三個參數(shù),即P:比例系數(shù)。I:積分系數(shù)。D:微分系數(shù)。在PID調(diào)節(jié)過程中我們需要知道兩個值:1、系統(tǒng)當(dāng)前狀態(tài)值(即反饋),即電機(jī)轉(zhuǎn)速的實(shí)際值。2、期望值。即
2021-09-07 06:38:00
比例環(huán)節(jié)先提高系統(tǒng)上升到穩(wěn)態(tài)的時間。3.增加一個積分環(huán)節(jié)徹底消除穩(wěn)態(tài)誤差。4.增加一個微分環(huán)節(jié)徹底消除超調(diào)量。5.綜合調(diào)整PID參數(shù)得到一個理想的輸出結(jié)果。并不是每個系統(tǒng)都需要PID我覺得,有時候PI能
2016-01-29 16:50:21
pidf是pid的改進(jìn),有誰對這個比較了解嗎?關(guān)于他的參數(shù)調(diào)整,其代碼有人會寫嗎?
2018-12-22 11:02:45
的電機(jī)相位沒有正弦電流,我無法改變電機(jī)的速度...... 如何調(diào)整速度控制器的PID參數(shù)以及clarke和park變換的PID參數(shù)? 我真的需要盡快幫助,因?yàn)槲倚枰M快使用這種電機(jī)。我希望任何人都可以幫助
2018-12-18 16:28:31
Simulink中的PID控制器調(diào)整
2018-07-31 14:20:25
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動調(diào)整pid的三個參數(shù)Kp、KI、Kd,做簡單的仿真模擬呢?希望有簡單的例子可以用來探討。labview自帶的例子只有單獨(dú)的一個模塊的運(yùn)用,并沒有將兩者聯(lián)合在一起的實(shí)例vi,會的人也可以可以私聊我或者直接回復(fù),另有答謝啊!!
2020-03-26 08:54:34
本帖最后由 夜魄Y 于 2020-3-24 07:40 編輯
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動調(diào)整pid的三個參數(shù)Kp、KI、Kd,做簡單的仿真模擬呢?希望有簡單的例子可以用來探討。懂得人也可以可以私聊我或者直接回復(fù),另有答謝啊!!!
2020-03-21 15:05:05
本帖最后由 夜魄Y 于 2020-3-24 07:41 編輯
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動調(diào)整pid的三個參數(shù)Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-17 08:41:43
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動調(diào)整pid的三個參數(shù)Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-19 10:34:29
PID控制器中輸入P,I和D的值,取決于像P,PI或PID這樣的控制器,如下所示。 PID控制器結(jié)構(gòu) PID控制器由三部分組成,即比例,積分和微分控制。這三個控制器的組合操作為過程控制提供了控制
2020-09-01 17:58:40
簡介:什么是 PID?它是一種在編程中使用的基本方法,如果正確調(diào)整,可以令人難以置信的有效和準(zhǔn)確,PID代表比例積分微分,3個單獨(dú)的部分連接在一起,雖然有時你不需要三個都使用.例如,您可以改為有P
2021-09-07 06:45:30
文章目錄是什么是PID參數(shù)調(diào)整增量式PID是什么是PIDP:比例proportionalI:積分integralD:微分derivative參數(shù)調(diào)整Kp:比例系數(shù):讓偏差(目標(biāo)減去當(dāng)前)與調(diào)節(jié)裝置
2022-01-20 06:44:16
什么是PID控制算法?PID控制算法C語言是如何實(shí)現(xiàn)的?特殊情況下的控制算法該如何去調(diào)整?比例、積分、微分三個環(huán)節(jié)的控制作用分別是什么?
2021-06-29 09:24:32
轉(zhuǎn)速,位置信號就由直接的最終負(fù)載端的檢測裝置來提供了,這樣的優(yōu)點(diǎn)在于可以減少中間傳動過程中的誤差,增加了整個系統(tǒng)的定位精度。4.談?wù)?環(huán)伺服電機(jī)一般為三個環(huán)控制,所謂三環(huán)就是3個閉環(huán)負(fù)反饋PID調(diào)節(jié)系統(tǒng)
2018-11-02 09:40:43
器:pid_regulator.c中提供豐富的關(guān)于PID控制及相關(guān)參數(shù)設(shè)置接口:如果需要用到PID控制器,在pid_regulator.c末尾,有個pid_controller接口,默認(rèn)是屏蔽...
2021-08-03 07:21:04
整套溫度控制系統(tǒng)選用DAQ板卡控制,通過DO數(shù)字輸出控制加熱絲脈沖加熱,以TC卡鏈接熱電偶,監(jiān)測溫度變化;程序結(jié)構(gòu)如圖:通過初始化PID參數(shù)調(diào)節(jié)出來的波形圖跟理想的PID控制圖完全不一致,問問
2015-05-05 16:20:33
原來的加熱器壞了,現(xiàn)在換功率大一點(diǎn)的,請問pid參數(shù)需要重新調(diào)整嗎
2019-04-29 07:55:22
PID三個參數(shù)各置多少成為純比例
2014-05-19 12:00:09
做,只會給其它工作增加復(fù)雜性,并給參數(shù)整定帶來困難。當(dāng)采用PID控制器還達(dá)不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。Kp,ti,Td三個參數(shù)的設(shè)定是PID控制算法
2019-05-30 10:23:04
。當(dāng)采用PID控制器還達(dá)不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。5、公式:數(shù)值pid的計算:6、問題。Kp,ti,Td三個參數(shù)的設(shè)定是PID控制算法的關(guān)鍵問題
2019-05-30 08:30:00
【平衡小車】【串級PID參數(shù)整定】【詳細(xì)版】根據(jù)現(xiàn)象手動調(diào)整平衡小車的PID簡介:二輪平衡小車的控制分為平衡環(huán)(又稱為直立環(huán),保持穩(wěn)定角度)、速度環(huán)(用來保持穩(wěn)定時速度為零)以及轉(zhuǎn)向環(huán)(用來無轉(zhuǎn)向
2022-01-05 06:38:32
調(diào)節(jié)法的優(yōu)缺點(diǎn)(好像這種方法只能給一個調(diào)節(jié)的大概位置,具體參數(shù)值還得繼續(xù)做實(shí)驗(yàn)調(diào)出來)4、頻率響應(yīng)法設(shè)計PID參數(shù)的優(yōu)缺點(diǎn)?5、以及還存在哪些高效實(shí)用的PID參數(shù)調(diào)節(jié)方法?熱忱歡迎懂PID控制的知友討論。上述問題如若表述有誤,還請指出來修正。補(bǔ)充:暫且定一個標(biāo)準(zhǔn):最大過調(diào)量小于10%,調(diào)整時間0.5秒以內(nèi)!
2018-07-30 10:29:20
變量來求得,求出的輸出值也就是PID參數(shù)KP,KI , KD的調(diào)整量,模糊控制表就是由這些調(diào)整量與輸入量在一個表中按一定關(guān)系列出而得到的。由于KP, KI , KD這三個參數(shù)調(diào)整時是相互獨(dú)立的,所以會
2016-02-01 10:25:56
用交流電220v加熱銅板控制溫度在32度上下波動不超過0.05度,想通過pid調(diào)節(jié)pwm占空比(低電平就加熱,高電平不加熱)來控制功率。程序重要參數(shù)說明設(shè)定溫度3200放大一百倍pwm加熱是半波加熱
2015-03-14 16:53:53
進(jìn)行調(diào)整和修改。二是工程整定方法,它主要依賴工程經(jīng)驗(yàn),直接控制系統(tǒng)試驗(yàn)中進(jìn)行,且方法簡單、易于掌握,工程實(shí)際中被廣泛采用。PID控制器參數(shù)工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。三種方法各有
2016-01-14 14:12:32
的時間。3.增加一個積分環(huán)節(jié)徹底消除穩(wěn)態(tài)誤差。4.增加一個微分環(huán)節(jié)徹底消除超調(diào)量。5 綜合調(diào)整PID參數(shù)得到一個理想的輸出結(jié)果。Kp(比例部分):可以減少系統(tǒng)的穩(wěn)態(tài)誤差但不能消除它徹底,可以減少系統(tǒng)
2016-01-14 17:54:05
及控制過程的曲線形狀,直接對控制系統(tǒng)反復(fù)地、逐漸地試湊,最終得到滿意的PID控制參數(shù)。為便于記憶和操作,儀表師傅們將這些經(jīng)驗(yàn)總結(jié)為一個口訣,即: 參數(shù)整定找最佳,從小到大順序查先是比例后積分,最后再把微分
2018-01-04 21:07:26
PID控制原理PID控制是從比例、積分和微分三個環(huán)節(jié)來實(shí)現(xiàn)對系統(tǒng)控制的。常規(guī)PID控制系統(tǒng)原理框圖如圖1所示,該系統(tǒng)由模擬PID控制器和被控對象組成。程序主界面如下所示:后面板程序:源程序下載:自動控制PID程序 修改版.zip
2019-04-23 09:40:05
請問Kp、Ki、Kd這三個常量的一般取值是多少?每個參數(shù)會對調(diào)整過程產(chǎn)生什么影響,取值過大或過小會怎么樣?
2016-09-16 22:05:47
=sptr->LastError;sptr->LastError=Error; return Inc;在將KIKD 取0 的情況下 取了三個不同大小的KP效果如下:KP=0.1,KI=0
2019-07-17 02:49:16
這里面右面這個三個參數(shù)怎么設(shè)置
2019-07-17 05:35:06
( NETIF_FLAG_BROADCAST)是允許網(wǎng)卡廣播,第二個參數(shù)(NETIF_FLAG_ETHARP)是允許使用ARP,那第三個參數(shù)(NETIF_FLAG_LINK_UP)是什么意思???
2019-07-19 04:35:49
四軸的串級pid調(diào)試,在調(diào)內(nèi)環(huán)的時候,外環(huán)pid的三個參數(shù)是怎么設(shè)置?遙控器給的控制是給在外環(huán)上,那我現(xiàn)在要調(diào)節(jié)內(nèi)環(huán)的參數(shù),是應(yīng)把外環(huán)pid的三個參數(shù)設(shè)置為0,還是什么?麻煩解答下,謝謝。
2019-08-06 03:56:06
pid參數(shù)調(diào)節(jié),軟件代碼視頻中并沒有講解。請問,如何一步一步去確定這三個參數(shù)的?
2018-10-23 10:57:06
控制器還達(dá)不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。Kp,Ti,Td 三個參數(shù)的設(shè)定是 PID 控制算法的關(guān)鍵問題。一般說來編程時只能設(shè)定他們的大概數(shù)值,并在系統(tǒng)運(yùn)行時
2020-02-23 07:00:00
PID控制器參數(shù)的優(yōu)化整定一直是自動控制領(lǐng)域的研究熱點(diǎn)。提出一種利用改進(jìn)思維進(jìn)化計算(MEC)優(yōu)化PID控制器參數(shù)的方法,在原有算法的框架上,加入自調(diào)整操作,依據(jù)進(jìn)化方向
2009-03-15 02:39:51 31
31 該文提出調(diào)整系統(tǒng)控制量的模糊 PID 控制器的計算機(jī)設(shè)計與仿真。以堿回收爐的水位控制為例具體論述調(diào)整系統(tǒng)控制量的模糊PID 控制器的設(shè)計、2-D 控制表的建立、以及控制器計算
2009-06-09 16:41:5220 本文針對用普通PID控制對VAV系統(tǒng)控制參數(shù)難以整定的問題,設(shè)計了一種基于模糊控制原理的PID參數(shù)在線自調(diào)整控制器,根據(jù)偏差和偏差變化率來實(shí)時調(diào)整p K , i K , d K 參數(shù)。通過
2009-08-07 09:50:1315 針對自己開發(fā)的液位控制系統(tǒng)參數(shù)難以調(diào)整的問題,本文提出了一種智能PID 的液位控制方法。智能PID 控制算法是在常規(guī)PID 控制算法的基礎(chǔ)上,根據(jù)前人和專家的經(jīng)驗(yàn)以及操作人員
2009-09-01 09:36:2626 PID 控制器的穩(wěn)定范圍參數(shù)值:在工業(yè)控制上,大部分的控制器都是使用PID 控制器,而適當(dāng)?shù)?b class="flag-6" style="color: red">調(diào)整PID 控制器參數(shù)遂便成極具挑戰(zhàn)的工作,但是有哪些范圍的PID數(shù)值可以使受控場(Plant)穩(wěn)
2009-10-31 14:31:4945 分析了變參數(shù)PID控制器各個參數(shù)隨著誤差信號的變化趨勢,得到它們的關(guān)系表達(dá)式。通過這個關(guān)系式去實(shí)現(xiàn)變參數(shù)PID控制器的參數(shù)校正。仿真結(jié)果表明能得到比常規(guī)非變參數(shù)PID控制
2010-07-21 09:37:1517 參數(shù)自適應(yīng)模糊PID控制器的設(shè)計
溫度控制系統(tǒng)中,采用了非線性的隸屬度函數(shù),以模糊控制為粗調(diào)、PID為細(xì)調(diào)。在模糊控制的基礎(chǔ)上,由PI
2009-02-27 09:29:312223 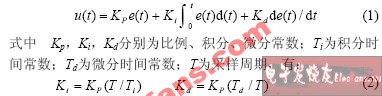
在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進(jìn)行控制的PID控制器(亦稱PID調(diào)節(jié)器)是應(yīng)用最為廣泛的一種自動控制器。
2012-01-13 17:14:0983 數(shù)字PID控制算法是將模擬PID離散化得到,各參數(shù)有著明顯的物理意義,調(diào)整方便,所以PID控制器很受工程技術(shù)人員的喜愛。
2012-01-16 16:27:45902 PID控制器設(shè)計與參數(shù)整定方法綜述-2005
2016-03-31 17:46:3325 參數(shù)自整定PID控制器設(shè)計與仿真,下來看看
2016-03-31 17:46:3333 PID控制器的模糊增益調(diào)整及在電阻爐溫控制系統(tǒng)中的應(yīng)用
2016-06-06 10:00:4612 網(wǎng)上找的PID的控制原理及手動調(diào)諧PID參數(shù),我覺得寫得不錯,可以參考
2016-06-14 14:13:2621 PID算法原理及調(diào)整規(guī)律對我?guī)椭艽螅窒斫o大家
2016-06-24 16:39:054 PID控制最通俗的解釋與PID參數(shù)的整定方法
2017-01-04 14:47:1540 在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進(jìn)行控制的PID控制器(亦稱PID調(diào)節(jié)器)是應(yīng)用最為廣泛的一種自動控制器。它具有原理簡單,易于實(shí)現(xiàn),適用面廣,控制參數(shù)相互獨(dú)立,參數(shù)的選定比較簡單等優(yōu)點(diǎn)
2017-11-24 15:05:1431563 增量式PID控制,數(shù)字PID控制算法的一種基本形式,是通過對控制量的增量(本次控制量和上次控制量的差值)進(jìn)行PID控制的一種控制算法。
2018-02-26 14:57:3250807 PID是比例、積分、微分的簡稱,PID控制的難點(diǎn)不是編程,而是控制器的參數(shù)整定。參數(shù)整定的關(guān)鍵是正確地理解各參數(shù)的物理意義,PID控制的原理可以用人對爐溫的手動控制來理解。閱讀本文不需要高深的數(shù)學(xué)知識。
2018-05-31 08:40:4444 PID是一個閉環(huán)控制算法。因此要實(shí)現(xiàn)PID算法,必須在硬件上具有閉環(huán)控制,就是得有反饋。比如控制一個電機(jī)的轉(zhuǎn)速,就得有一個測量轉(zhuǎn)速的傳感器,并將結(jié)果反饋到控制路線上,下面也將以轉(zhuǎn)速控制為例。
2018-08-29 14:16:0116998 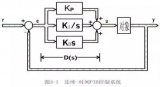
PID是一個閉環(huán)控制算法。因此要實(shí)現(xiàn)PID算法,必須在硬件上具有閉環(huán)控制,就是得有反饋。比如控制一個電機(jī)的轉(zhuǎn)速,就得有一個測量轉(zhuǎn)速的傳感器,并將結(jié)果反饋到控制路線上,下面也將以轉(zhuǎn)速控制為例。
2018-11-20 11:19:4619600 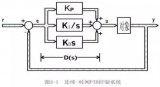
PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動控制系統(tǒng)投自動,這代表著工程技術(shù)人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2019-07-18 16:10:3228383 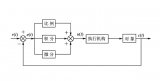
自學(xué)習(xí)、加權(quán)系數(shù)調(diào)整,實(shí)現(xiàn)PID 的最優(yōu)調(diào)整,本文以小車控制為例,利用BP 神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)能力進(jìn)行PID 參數(shù)的在線整定,并進(jìn)行了MATLAB 仿真,結(jié)果明,利用BP 神經(jīng)網(wǎng)絡(luò)可很快的找到PID 的控制參數(shù)。
2019-10-11 16:06:4838 PID控制器參數(shù)選擇的方法很多,例如試湊法、臨界比例度法、擴(kuò)充臨界比例度法等。但是,對于PID控制而言,參數(shù)的選擇始終是一件非常煩雜的工作,需要經(jīng)過不斷的調(diào)整才能得到較為滿意的控制效果。
2019-10-22 08:00:005 PID控制作為一種經(jīng)典的控制方法而廣泛應(yīng)用于工業(yè)控制中,是實(shí)際工業(yè)生產(chǎn)過程正常運(yùn)行的基本保障。隨著計算機(jī)技術(shù)的飛躍發(fā)展和人工智能技術(shù)滲透到自動控制領(lǐng)域,出現(xiàn)了多種PID控制器的參數(shù)整定方法。本文
2019-12-04 08:00:0014 PID控制器除了上述Ke、Ti、Td三個參數(shù)外,還有采樣周期Ts,其作用如下:
2020-07-21 10:15:1412118 
PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動控制系統(tǒng)投自動,這代表著工程技術(shù)人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2020-08-31 09:34:524192 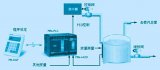
? PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動控制系統(tǒng)投自動,這代表著工程技術(shù)人員
2020-12-25 17:24:0814398 PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。
2021-05-27 15:38:4095 作為經(jīng)典的控制理論,PID控制規(guī)律仍然是當(dāng)今工控行業(yè)的主導(dǎo)控制方式,無論復(fù)雜、簡單的控制任務(wù),PID控制都能取得滿意的控制效果,前提是PID參數(shù)必須選擇合適。可以說,通過適當(dāng)?shù)?b class="flag-6" style="color: red">PID參數(shù),PID控制
2021-06-01 10:28:0157 PID因穩(wěn)定性極好現(xiàn)被廣泛應(yīng)用于工業(yè)過程控制領(lǐng)域。PID能改善系統(tǒng)在調(diào)節(jié)過程中的動態(tài)特性以及可以避免被控量的嚴(yán)重超調(diào),具有抑制誤差的作用,在一定的控制度下通過公式計算得到PID控制器的參數(shù),在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。
2021-10-11 10:19:4115156 PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動控制系統(tǒng)投自動,這代表著工程技術(shù)人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2022-09-27 15:27:224121 PID控制器(比例-積分-微分控制器),由比例單元(Proportional)、積分單元(Integral)和微分單元(Derivative)構(gòu)成,可以通過調(diào)整這三個單元的增益來調(diào)整其特性,如下圖所示。PID控制器主要適用于基本上線性且動態(tài)特性不隨時間變化的系統(tǒng)。
2022-11-03 11:43:51737 PID調(diào)節(jié)器是一種常見的控制系統(tǒng),它可以通過對輸入信號進(jìn)行處理,控制輸出信號來維持目標(biāo)參數(shù)的穩(wěn)定性。PID調(diào)節(jié)器的三個重要參數(shù)如下:
比例系數(shù)(P):比例系數(shù)是PID調(diào)節(jié)器中最基本的參數(shù)
2023-03-25 11:37:2714447 、流量計等。
調(diào)整參數(shù):根據(jù)實(shí)際控制效果和要求,調(diào)整PID控制器的三個參數(shù),即比例系數(shù)、積分時間和微分時間。
啟動控制器:啟動PID控制器,并觀察控制器輸出量的變化和控制效果。
2023-03-25 11:41:2211752 力保持試驗(yàn)。 而要成功進(jìn)行力保持試驗(yàn),正確調(diào)整PID(比例-積分-微分)參數(shù)是至關(guān)重要的。本文科準(zhǔn)測控小編將為您介紹如何在橡膠拉力測試機(jī)上正確調(diào)整PID參數(shù),以解決這一問題。 一、PID控制的基本原理 在開始調(diào)整PID參數(shù)之前,首
2023-10-09 09:51:25248 
PID調(diào)節(jié)是一種廣泛用于工業(yè)控制系統(tǒng)中的反饋回路控制方法。通過調(diào)整比例(P)、積分(I)和微分(D)三個參數(shù),可以有效地控制系統(tǒng)誤差,提高系統(tǒng)的穩(wěn)定性和響應(yīng)速度。下面將詳細(xì)介紹PID調(diào)節(jié)參數(shù)
2023-11-24 14:14:555416 在計算機(jī)科學(xué)中,PID(進(jìn)程標(biāo)識符)是一個用于唯一標(biāo)識運(yùn)行中的進(jìn)程的整數(shù)值。PID主要具有以下三個參數(shù)作用: 進(jìn)程創(chuàng)建:PID參數(shù)用于在操作系統(tǒng)中創(chuàng)建新的進(jìn)程。當(dāng)操作系統(tǒng)啟動一個進(jìn)程時,會為其分配
2024-01-16 14:56:341778 參數(shù)對系統(tǒng)的影響。 一、PID控制原理 PID控制的基本原理是根據(jù)反饋信號來調(diào)整輸出控制量,使得系統(tǒng)的實(shí)際輸出與期望輸出盡可能接近。 PID控制器的基本結(jié)構(gòu)由三個分別對應(yīng)于比例(Proportional
2024-01-22 15:35:00669
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論