。此處主要介紹步進(jìn)電機(jī)全步和半步兩種運(yùn)行方式。##由TLE4729G內(nèi)部結(jié)構(gòu)可以知道,其功率級(jí)輸出為兩個(gè)全橋,為了分析步進(jìn)電機(jī)換向過(guò)程中的電流行為和峰值控制原理,取出其中一個(gè)全橋進(jìn)行分析。圖8是輸出Q11
2015-04-13 16:04:09 9615
9615 
stm32為例,使用ULN2003,TB6600電機(jī)驅(qū)動(dòng)板,介紹步進(jìn)電機(jī)的常用驅(qū)動(dòng)方式。
2022-09-02 17:08:344871 
關(guān)閉定時(shí)器。以上控制方式都沒(méi)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的位置的自由控制,即讓步進(jìn)電機(jī)跟隨任意位置曲線運(yùn)動(dòng),此項(xiàng)目是為了實(shí)現(xiàn)步進(jìn)電機(jī)的自由控制,能準(zhǔn)確定位。可以使用編碼器或者電位器作為控制器,用手?jǐn)Q編碼器,步進(jìn)電機(jī)可跟隨一起運(yùn)動(dòng),也可以按照函數(shù)曲線運(yùn)動(dòng)。
2022-10-14 11:28:383482 步進(jìn)電機(jī)是我們生活中常見(jiàn)的電機(jī)之一。顧名思義,步進(jìn)電機(jī)是根據(jù)一系列步距角進(jìn)行旋轉(zhuǎn),就像人們一步步上下樓梯一樣。步進(jìn)電機(jī)將完整的360度旋轉(zhuǎn)等分為若干步長(zhǎng),按順序執(zhí)行步長(zhǎng)從而實(shí)現(xiàn)特定旋轉(zhuǎn),同時(shí)通過(guò)
2023-03-08 15:12:392734 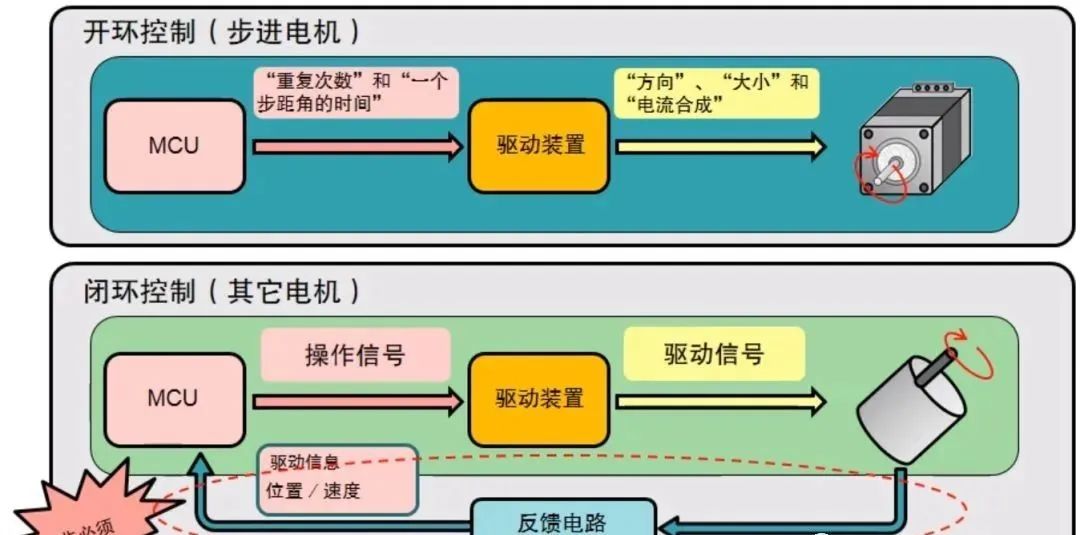
在如今這個(gè)智能時(shí)代,步進(jìn)電機(jī)因其特有的開(kāi)環(huán)位置控制性能而被廣泛應(yīng)用。各設(shè)備在步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的過(guò)程中,對(duì)它輸出力矩的平滑性有一定的要求。轉(zhuǎn)動(dòng)的穩(wěn)定性除了和步進(jìn)電機(jī)的本體結(jié)構(gòu)有關(guān),也和步進(jìn)電機(jī)的控制方式
2023-08-21 11:31:17718 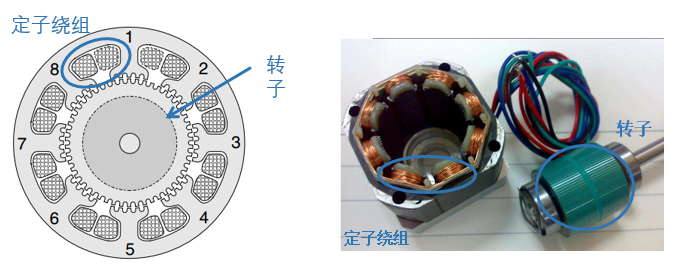
先來(lái)看一下硬件原理圖,可看到控制步進(jìn)電機(jī)的管腳分別為:GPIO6[2]、GPIO6[3]、GPIO6[4]和GPIO1[15]。使用的是一路四相五線步進(jìn)電機(jī),使用的電機(jī)驅(qū)動(dòng)芯片是L9110。
2023-08-04 14:45:412092 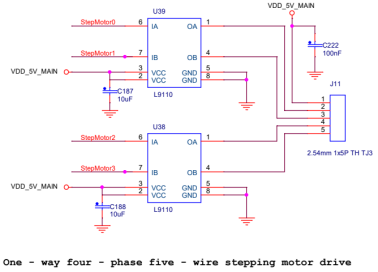
一、設(shè)計(jì)目的分析步進(jìn)電機(jī)的驅(qū)動(dòng)原理,將單片機(jī)應(yīng)用于步進(jìn)電機(jī)的控制接口設(shè)計(jì);利用中斷定時(shí)方法,實(shí)現(xiàn)步進(jìn)電機(jī)的位置控制、方向控制和速度控制。利用ZLG7290鍵盤/顯示電路,設(shè)置給定信號(hào),并顯示實(shí)際信息
2021-12-02 07:45:41
大牛們,幫我分析下下面的電路能否驅(qū)動(dòng)兩相步進(jìn)電機(jī)其中1/2/3/4接單片機(jī),另外1綠(地)2棕3黃4橙5紅分別接步進(jìn)電機(jī),電路已經(jīng)搭好了,電機(jī)不轉(zhuǎn),幫我分析下原因唄,謝謝,各位大牛們!
2017-03-15 16:33:57
首先,什么是步進(jìn)電機(jī):然后是步進(jìn)電機(jī)的分類:這里重點(diǎn)講一下二相和四相電機(jī):兩相八線步進(jìn)電機(jī)有兩種接法:我們?cè)趺醋?b class="flag-6" style="color: red">步進(jìn)電機(jī)動(dòng)起來(lái):然后我們講單片機(jī)控制方式:一般的小功率步進(jìn)電機(jī),用ULN2803就可以了:電路如下:程序控制如下:需要控制大功率的兩相步進(jìn)電機(jī)時(shí)就可以考慮如下控制方式:分為
2021-07-08 06:12:11
控制方式。**1.步進(jìn)電機(jī)開(kāi)環(huán)控制的原理 當(dāng)步進(jìn)電機(jī)的定子一相繞組流過(guò)直流電流時(shí),最接近該相的轉(zhuǎn)子齒被定子相吸引,因產(chǎn)生的電磁轉(zhuǎn)矩大于負(fù)載轉(zhuǎn)矩,從而使轉(zhuǎn)子運(yùn)動(dòng)。當(dāng)轉(zhuǎn)子轉(zhuǎn)動(dòng)到電磁轉(zhuǎn)矩與負(fù)載轉(zhuǎn)矩平...
2021-07-07 06:56:09
步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析采用閉環(huán)技術(shù)的步進(jìn)電機(jī)
2021-02-05 06:05:47
步進(jìn)電機(jī)和伺服電機(jī)控制的方式有何不同?步進(jìn)電機(jī)和伺服電機(jī)的低頻特性有何不同?
2021-09-28 07:55:48
步進(jìn)電機(jī)和伺服電機(jī)是怎樣接線的?步進(jìn)電機(jī)和伺服電機(jī)有哪幾種接線方式?
2021-09-26 08:00:08
什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)有哪幾種?步進(jìn)電機(jī)是怎么控制的?
2021-10-08 07:28:20
步進(jìn)電機(jī)的步進(jìn)方式有哪幾種?
2021-10-28 07:01:39
步進(jìn)電機(jī)的開(kāi)環(huán)控制分析
2021-01-22 06:57:59
步進(jìn)電機(jī)的驅(qū)動(dòng)與控制,步進(jìn)電機(jī)基礎(chǔ)(5.9)-步進(jìn)電機(jī)的驅(qū)動(dòng)與控制-三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路前言基本信息前言說(shuō)明5.9 三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路1 . 三相電機(jī)的驅(qū)動(dòng)方式三相步進(jìn)電機(jī)用驅(qū)動(dòng)器ICICIC
2021-07-08 09:06:00
步進(jìn)電機(jī)基礎(chǔ)(5.6)-步進(jìn)電機(jī)的驅(qū)動(dòng)與控制-閉環(huán)控制前言基本信息前言說(shuō)明5.6 閉環(huán)控制前言基本信息名稱描述說(shuō)明教材名稱步進(jìn)電機(jī)應(yīng)用技術(shù)作者坂本正文譯者王自強(qiáng)前言說(shuō)明根據(jù)我讀的《步進(jìn)電機(jī)應(yīng)用技術(shù)
2021-07-07 06:18:52
什么是步進(jìn)電機(jī),它是怎么控制的?步進(jìn)電機(jī)的種類有哪些?怎么實(shí)現(xiàn)步進(jìn)電機(jī)的正轉(zhuǎn)反轉(zhuǎn)?
2021-10-20 06:18:48
步進(jìn)電動(dòng)機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(這個(gè)角度叫做歩距角)。我們可以通過(guò)控制脈沖的個(gè)數(shù)來(lái)控制電機(jī)的角位移量
2018-10-17 10:20:27
如何使用主從定時(shí)器方式控制PWM波輸出給步進(jìn)電機(jī)驅(qū)動(dòng)器來(lái)控制步進(jìn)電機(jī)?
2021-11-18 07:59:44
,可以簡(jiǎn)單的位置控制(低速)使用定時(shí)器中斷,基數(shù)脈沖個(gè)數(shù)。可以對(duì)步進(jìn)電機(jī)做梯形或者S形的加速控制。優(yōu)點(diǎn):可以降低步進(jìn)電機(jī)的開(kāi)環(huán)丟步,但是頻繁中斷。關(guān)于步進(jìn)伺服電機(jī)1:?jiǎn)蚊}沖法 :參考步進(jìn)電機(jī)2:門控方式:用主從定時(shí)器門控方式,比較繁瑣;3:高級(jí)定時(shí)器T1、T8的重復(fù)計(jì)數(shù)方式 高級(jí)定時(shí)器有一個(gè)8位
2021-06-28 08:07:43
我們平時(shí)都用到電機(jī),它是一種把電能轉(zhuǎn)換為機(jī)械能的裝置,下面我們用實(shí)例來(lái)說(shuō)說(shuō)步進(jìn)電機(jī)和直流電機(jī)在控制方式上有什么不同。今天我們用兩個(gè)實(shí)例來(lái)給剛學(xué)單片機(jī)的小伙伴們說(shuō)明,兩種電機(jī)控制方式的不同。一、步進(jìn)
2022-01-19 07:30:08
單片機(jī)怎么通過(guò)按鍵控制計(jì)時(shí)器的開(kāi)始和停止?用單片機(jī)控制步進(jìn)電機(jī)與直流電機(jī)其原理是否一樣?步進(jìn)電機(jī)和直流電機(jī)在控制方式上有什么不同?
2021-10-21 06:03:24
伺服電機(jī)具有哪些缺陷?閉環(huán)步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析哪個(gè)好?
2021-09-27 08:13:44
單相永磁步進(jìn)電機(jī)特性的數(shù)值計(jì)算與分析:介紹了單相步進(jìn)電機(jī)結(jié)構(gòu)簡(jiǎn)單控制方便等更多的特點(diǎn)。
2009-04-02 14:50:10 23
23 步進(jìn)電機(jī)在開(kāi)環(huán)控制系統(tǒng)中作為控制用電機(jī)和驅(qū)動(dòng)用電機(jī)得到廣泛使用,為防止失步和過(guò)沖,使用步進(jìn)電機(jī)高速運(yùn)行時(shí)必須有升降速過(guò)程。本文在分析比較幾種常用的升降速控制
2009-08-18 09:17:2464 用MCP定時(shí)器控制步進(jìn)電機(jī):步進(jìn)電機(jī)簡(jiǎn)介1.1.1 步進(jìn)電機(jī)步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開(kāi)關(guān)器件,通過(guò)功
2009-09-19 11:36:3222 用GPIO做步進(jìn)電機(jī)控制:步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開(kāi)關(guān)器件,通過(guò)功率放大器使勵(lì)磁繞組按照順序輪流接通
2009-09-19 11:37:5869 步進(jìn)電機(jī)是一種易于精確控制的電機(jī),由于其良好的性能而受到廣泛的應(yīng)用。其控制方法也多種多樣。介紹了8051系列單片機(jī)對(duì)步進(jìn)電機(jī)的控制方法,并且提出和對(duì)比了幾種步進(jìn)電機(jī)
2009-11-07 15:11:00136 本設(shè)計(jì)采用凌陽(yáng)16 位單片機(jī)SPCE061A對(duì)步進(jìn)電機(jī)進(jìn)行控制,通過(guò)IO口輸出的具有時(shí)序的方波作為步進(jìn)電機(jī)的控制信號(hào),信號(hào)經(jīng)過(guò)芯片L298N驅(qū)動(dòng)步進(jìn)電機(jī);同時(shí),用4X4的鍵盤來(lái)對(duì)電機(jī)的狀
2010-01-09 10:25:45160 K-880步進(jìn)電機(jī)控制卡使用說(shuō)明書(shū):K-880是一款能夠同時(shí)控制4個(gè)伺服電機(jī)或步進(jìn)電機(jī)的運(yùn)動(dòng)控制卡,它以高頻率脈沖串輸出方式,控制伺服和步進(jìn)電機(jī)的運(yùn)動(dòng)。在一個(gè)系統(tǒng)中,可嵌入多塊
2010-01-09 13:57:3622 本文介紹了以MC68332 的TPU 為基礎(chǔ)組成的步進(jìn)電機(jī)控制電路, 給出了主要的程序, 詳細(xì)分析了這個(gè)電路的主要性能, 明確提出了該電路的優(yōu)點(diǎn)和應(yīng)用范圍。關(guān)鍵詞: 步進(jìn)電機(jī) 控制
2010-01-13 08:57:33108 摘要:介紹了一種基于微機(jī)和單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),利用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式,可實(shí)現(xiàn)步進(jìn)電機(jī)正反轉(zhuǎn)控制以及步進(jìn)電機(jī)的無(wú)級(jí)調(diào)速。程序采用模塊化設(shè)計(jì),通
2010-07-22 21:16:4176 控制步進(jìn)電機(jī)的現(xiàn)場(chǎng)總線端子-集成的步進(jìn)電機(jī)控制器:用于新驅(qū)動(dòng)技術(shù)的總線端子為最高功率為200W 的小型步進(jìn)電機(jī)提供了運(yùn)動(dòng)控制解決方案。KL2531和KL2541 步進(jìn)電機(jī)端子便是用于傳
2010-10-06 09:52:5741 步進(jìn)電機(jī)控制實(shí)驗(yàn)
一.實(shí)驗(yàn)?zāi)康牧私?b class="flag-6" style="color: red">步進(jìn)電機(jī)的工作原理,
2008-09-22 17:53:013383 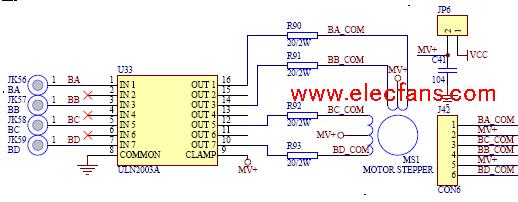
實(shí)驗(yàn) 步進(jìn)電機(jī)自動(dòng)控制一、實(shí)驗(yàn)?zāi)康?nbsp; 1.掌握用PLC控制步進(jìn)電機(jī)的方法。
2008-09-30 13:16:041452 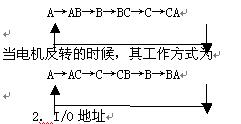
單片機(jī)控制步進(jìn)電機(jī)的原理
本資料詳細(xì)介紹鄧步進(jìn)電機(jī)的工作原理以及單片機(jī)控制步進(jìn)電機(jī)的特點(diǎn)。步進(jìn)電機(jī)是數(shù)字控制電機(jī),它將脈沖信號(hào)轉(zhuǎn)
2009-03-30 11:13:2484434 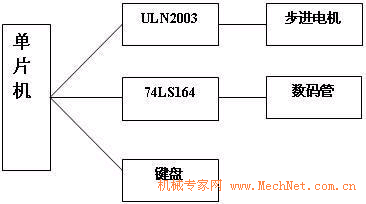
8255A控制步進(jìn)電機(jī)
<實(shí)驗(yàn)?zāi)康?gt;了解步進(jìn)電機(jī)的的基本控制原理,掌握控制步進(jìn)電機(jī)的轉(zhuǎn)速、轉(zhuǎn)向的程序設(shè)計(jì)方法。<實(shí)驗(yàn)內(nèi)
2009-06-28 00:02:405354
步進(jìn)電機(jī)常見(jiàn)的三種通電方式
2009-07-31 17:26:549947 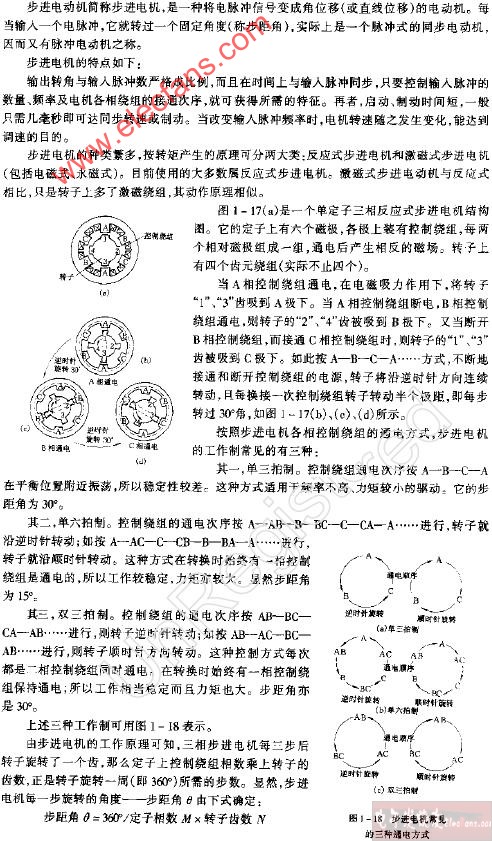
FPGA在步進(jìn)電機(jī)控制中的應(yīng)用
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過(guò)控制脈沖數(shù)來(lái)控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可
2009-12-24 16:52:261645 
步進(jìn)電機(jī)細(xì)分控制原理
步進(jìn)電機(jī)控制已經(jīng)蘊(yùn)含了細(xì)分的原理。電機(jī)內(nèi)部磁場(chǎng)每旋轉(zhuǎn)一個(gè)圓周, 步進(jìn)電機(jī)前進(jìn)一整個(gè)步距角。若四相步
2010-01-10 22:40:218751 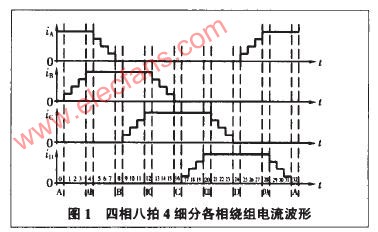
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。電子發(fā)燒友網(wǎng)整理了步進(jìn)電機(jī)控制系統(tǒng)的一些控制原理及步進(jìn)電機(jī)驅(qū)動(dòng)電路圖、步進(jìn)電機(jī)控制驅(qū)動(dòng)程序等知識(shí),較為翔實(shí)的介紹了步進(jìn)電機(jī)控制系統(tǒng)。
2012-06-18 16:52:56

步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0154 步進(jìn)電機(jī)控制,基于C51的步進(jìn)電機(jī)控制,快來(lái)下載學(xué)習(xí)吧
2016-01-13 14:12:0750 步進(jìn)電機(jī)控制參考資料,基于L297/298的步進(jìn)電機(jī)工作模式的單片機(jī)接口
2016-06-02 17:09:584 本文以虛擬儀器技術(shù)為理論基礎(chǔ),應(yīng)用labVIEW 軟件替代硬件電路的方式,實(shí)現(xiàn)了步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。本文詳細(xì)介紹了利用485 串口進(jìn)行通信,采用labview 編程來(lái)實(shí)現(xiàn)控制步進(jìn)電機(jī)的正、反轉(zhuǎn)
2016-10-11 17:41:5920 單細(xì)胞分析儀中步進(jìn)電機(jī)的定位控制_金路
2017-01-17 19:58:240 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-11-21 16:28:3636820 
提出一種應(yīng)用現(xiàn)場(chǎng)可編程門陣列(FPGA)實(shí)現(xiàn)多軸步進(jìn)電機(jī)控制器的方法。采用IP設(shè)計(jì)思想,步進(jìn)電機(jī)的運(yùn)動(dòng)控制由硬件電路(步進(jìn)電機(jī)IP核)實(shí)現(xiàn),軌跡計(jì)算由同一芯片上的微處理器(Nios II軟核)實(shí)現(xiàn)
2017-12-06 10:41:3023 步進(jìn)電機(jī)是靠接收脈沖電流來(lái)實(shí)現(xiàn)速度、位置和方向的控制,脈沖的多少?zèng)Q定步進(jìn)電機(jī)的位置,脈沖的速率決定電機(jī)的轉(zhuǎn)速,脈沖的方向決定電機(jī)的轉(zhuǎn)向。現(xiàn)在大多數(shù)步進(jìn)電機(jī)的控制方式就是用plc發(fā)脈沖給驅(qū)動(dòng)器,驅(qū)動(dòng)器
2017-12-14 15:46:1235485 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4726 步進(jìn)電動(dòng)機(jī)的控制方式一般分為開(kāi)環(huán)控制與閉環(huán)控制兩種控制方式,其中開(kāi)環(huán)控制步進(jìn)電機(jī)最簡(jiǎn)單的控制方式就是玎環(huán)控制系統(tǒng),在這樣的控制方式下,步進(jìn)電機(jī)控制脈沖的輸入并不依賴于轉(zhuǎn)子的位置,反而是按一固定的規(guī)律
2018-04-25 14:28:54106655 
步進(jìn)電機(jī)控制原理在步進(jìn)電機(jī)實(shí)驗(yàn)(1)中已經(jīng)闡述過(guò),此處不再累述。在步進(jìn)電機(jī)實(shí)驗(yàn)(1)中主要是在正確理解步進(jìn)電機(jī)控制時(shí)序的基礎(chǔ)上完成的,對(duì)時(shí)序分析能力和編程能力要求較高。本實(shí)驗(yàn)使用步進(jìn)電機(jī)控制芯片L297,這個(gè)芯片可以自動(dòng)產(chǎn)生控制時(shí)序,可以簡(jiǎn)化編程內(nèi)容,同時(shí)也能夠節(jié)省I/O口的使用。
2018-05-04 10:23:5113 步進(jìn)電機(jī)失步的原因和對(duì)策 步進(jìn)電機(jī)可以根據(jù)脈沖數(shù)和脈沖頻率來(lái)對(duì)電機(jī)實(shí)現(xiàn)開(kāi)環(huán)控制位置和速度,是一種便宜、簡(jiǎn)單好用的控制類電機(jī),在自動(dòng)化控制領(lǐng)域得到越來(lái)越廣泛的應(yīng)用。但由于步進(jìn)電機(jī)不是閉環(huán)控制,選型或者
2020-06-28 17:25:1512072 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2019-07-31 17:35:0016 工業(yè)控制上用到的步進(jìn)電機(jī)有多種控制方式。對(duì)于空調(diào)使用的步進(jìn)電機(jī)并不太了解,但從它控制簡(jiǎn)單,且主要需要價(jià)格便宜的特性來(lái)看,它應(yīng)該是使用的脈沖控制方式。
2019-10-07 16:39:0015368 
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)角度。
2019-10-01 08:58:0015865 步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)角度。
2019-12-10 08:49:067859 步進(jìn)電機(jī)可以對(duì)旋轉(zhuǎn)角度和轉(zhuǎn)動(dòng)速度進(jìn)行高精度控制。步進(jìn)電機(jī)作為控制執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一, 廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)和精密機(jī)械等領(lǐng)域。例如,在儀器儀表,機(jī)床設(shè)備以及計(jì)算機(jī)的外圍設(shè)備
2021-03-19 17:45:259993 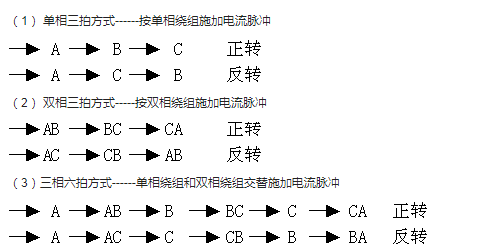
經(jīng)常聽(tīng)到眾多人說(shuō)plc控制伺服電機(jī)運(yùn)行,那么也有人疑惑可以不可以控制步進(jìn)呢?答案是可以的,也需要配步進(jìn)電機(jī)驅(qū)動(dòng)器。plc控制步進(jìn)電機(jī)其實(shí)在使用中有一個(gè)很大的特點(diǎn),就是在使用的時(shí)候?qū)?b class="flag-6" style="color: red">步進(jìn)電機(jī)的也具有
2021-01-12 16:14:283387 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計(jì), 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計(jì)方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0027 51單片機(jī)控制步進(jìn)電機(jī)的C程序。
2021-05-17 09:28:1810 今天為大家分享一個(gè)客戶的案例,包裝膜種步進(jìn)電機(jī)的應(yīng)用!對(duì)于包裝機(jī)械的供應(yīng)包裝膜環(huán)節(jié),假設(shè)包裝機(jī)械為一體,膜的提供分為兩種方式,文中解釋了拓達(dá)步進(jìn)電機(jī)在兩種方式下的應(yīng)用分析。在制袋、充填、封口為一體
2021-07-11 15:21:45346 步進(jìn)電機(jī)受電脈沖信號(hào)控制,電脈沖信號(hào)的產(chǎn)生、分配、放大全靠電子元器件的動(dòng)作來(lái)實(shí)現(xiàn)。由于脈沖控制信號(hào)的驅(qū)動(dòng)能力一般都很弱,因此必須有功率放大驅(qū)動(dòng)電路。步進(jìn)電機(jī)與控制電路、功率放大驅(qū)動(dòng)電路組成一體,構(gòu)成
2021-08-09 23:27:4715833 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)并且運(yùn)用范圍廣泛的電機(jī)控制器,步進(jìn)電機(jī)控制器怎么使用?下面就由小編來(lái)簡(jiǎn)單介紹一下!
2021-07-19 09:52:575457 ? 步進(jìn)電機(jī)又稱脈沖電機(jī),它是一種感應(yīng)電機(jī),涉及到機(jī)械、電機(jī)、電子及計(jì)算機(jī)等許多專業(yè)知識(shí)。步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。隨著微電子和計(jì)算機(jī)技術(shù)
2021-07-19 15:49:3311901 本文檔作備份用。摘 要: 設(shè)計(jì)了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫,包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤信號(hào)
2021-11-23 16:22:5118 到目前為止,我們已經(jīng)介紹了步進(jìn)電機(jī)的結(jié)構(gòu)和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。本文在表格中簡(jiǎn)要匯總了步進(jìn)電機(jī)的特征及步進(jìn)電機(jī)應(yīng)用。
2023-02-24 09:51:121006 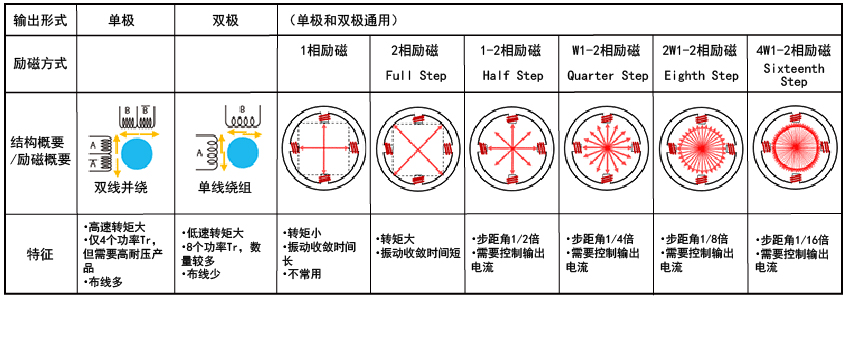
最簡(jiǎn)單的步進(jìn)電機(jī)驅(qū)動(dòng)方法是單相雙極驅(qū)動(dòng)方式,也稱為雙相步進(jìn)驅(qū)動(dòng)方式。該方式只需要使用一個(gè) H橋驅(qū)動(dòng)器和一個(gè)脈沖發(fā)生器,即可實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2023-03-08 14:21:5612542 步進(jìn)電機(jī)和伺服電機(jī)是兩種常見(jiàn)的電機(jī)類型,它們的應(yīng)用場(chǎng)景和控制方式不同,下面是它們的區(qū)別和選型方法:
步進(jìn)電機(jī)是一種開(kāi)環(huán)控制電機(jī),控制信號(hào)為脈沖信號(hào),通過(guò)控制脈沖數(shù)量和頻率來(lái)控制電機(jī)的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)具有簡(jiǎn)單的控制方式、低成本和較高的精度,但通常不能提供高速運(yùn)動(dòng)和高負(fù)載扭矩。
2023-03-08 14:40:451257 步進(jìn)電機(jī)的旋轉(zhuǎn)速度可以通過(guò)控制脈沖信號(hào)的頻率和電機(jī)驅(qū)動(dòng)方式來(lái)實(shí)現(xiàn)。
脈沖頻率控制:步進(jìn)電機(jī)的旋轉(zhuǎn)速度與脈沖信號(hào)的頻率成正比,因此可以通過(guò)調(diào)整脈沖信號(hào)的頻率來(lái)控制電機(jī)的旋轉(zhuǎn)速度。一般來(lái)說(shuō)
2023-03-08 17:03:123337 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過(guò)開(kāi)環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
步進(jìn)電機(jī)是一種特殊的電機(jī),通過(guò)逐步變化電磁場(chǎng)的方向和大小來(lái)實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng),可以控制角度和轉(zhuǎn)速。其工作原理如下:
步進(jìn)電機(jī)通常由定子和轉(zhuǎn)子兩部分組成。定子上有多個(gè)電磁線圈,電磁線圈中的電流
2023-03-09 14:28:487378 步進(jìn)電機(jī)的驅(qū)動(dòng)方式可以描述為:
1、步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。
2、當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。
3、通過(guò)
2023-03-16 14:04:533 的知識(shí),主要包括步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)、加減速控制等內(nèi)容。 1)步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng) 我們先來(lái)講解什么是細(xì)分驅(qū)動(dòng),以兩相的雙極性電機(jī)為例子,它的基本結(jié)構(gòu)如下圖: 最基本的驅(qū)動(dòng)方式是依次執(zhí)行:A相通正電流,B相
2023-03-20 10:45:5510 本章介紹步進(jìn)電機(jī)的主要驅(qū)動(dòng)方式和控制方法。步進(jìn)電機(jī)性能除了電機(jī)本體外,還會(huì)根據(jù)驅(qū)動(dòng)方式和控制方法不同而受到很大影響。選擇步進(jìn)電機(jī)的時(shí)候,同時(shí)要著重考慮驅(qū)動(dòng)方式和控制方法。
2023-03-20 10:52:305 利用單片機(jī)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制,編寫程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動(dòng)。同時(shí),要求按下“Positive(正轉(zhuǎn))”按鍵時(shí),控制步進(jìn)電機(jī)
2023-03-21 15:25:243 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-21 11:01:202 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。
步進(jìn)電機(jī)收到一個(gè)脈沖,步進(jìn)電機(jī)走一個(gè)步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖數(shù)
2023-03-22 10:42:590 步進(jìn)電機(jī)的控制方式為開(kāi)關(guān)控制,即沒(méi)有反饋裝置。例如某控制器(PLC)向步進(jìn)電機(jī)發(fā)送了800個(gè)脈沖,那么究竟該步進(jìn)電
機(jī)有沒(méi)有走對(duì)應(yīng)800個(gè)脈沖的距離或旋轉(zhuǎn)角度無(wú)法得知。
2023-03-22 14:19:172 需要準(zhǔn)備設(shè)備: DC類型的PLC、步進(jìn)電機(jī)、控制卡、24v開(kāi)關(guān)電源、電線若干
步進(jìn)電機(jī)連接步進(jìn)控制卡:首先檢查電機(jī)的AB項(xiàng),將電機(jī)中的隨意兩對(duì)線進(jìn)行連接,并用力旋轉(zhuǎn)電機(jī)軸,如果不能旋轉(zhuǎn)
2023-03-22 09:59:260 步進(jìn)電機(jī)和伺服電機(jī)哪個(gè)好,這個(gè)沒(méi)有絕對(duì)的答案,適合的才是最好的!下面從步進(jìn)電機(jī)和伺服電機(jī)各種的優(yōu)缺點(diǎn)、性能特點(diǎn)
進(jìn)行分析:
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:324 。 ②中斷方式的轉(zhuǎn)動(dòng)。 ③啟停。按KK1+鍵控制步進(jìn)電機(jī)的啟動(dòng)。按KK2+鍵控制步進(jìn)電機(jī)的停止。 ④正反轉(zhuǎn)。開(kāi)關(guān)K7控制步進(jìn)電機(jī)的正反轉(zhuǎn)。當(dāng)K7向下?lián)軙r(shí),電機(jī)正轉(zhuǎn)(順時(shí)針);向上撥時(shí),電機(jī)反轉(zhuǎn)(逆時(shí)針)。 ⑤在LED數(shù)碼管上顯示速度編號(hào)。K0對(duì)
2023-03-23 10:56:581 一文帶你了解步進(jìn)電機(jī)的相關(guān)知識(shí):相、線、極性和步進(jìn)方式 原文鏈接:這里不說(shuō)步進(jìn)電機(jī)的 “細(xì)分” 實(shí)驗(yàn),只說(shuō)一下有關(guān)步進(jìn)電機(jī)的基礎(chǔ)概念以及步進(jìn)電機(jī)的三種工作方式——單拍、雙拍、單雙拍,現(xiàn)在步進(jìn)電機(jī)
2023-03-24 11:04:023 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來(lái)控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:201184 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)
2023-05-05 14:16:034 步進(jìn)伺服和步進(jìn)電機(jī)都是一種設(shè)備,但它們的工作原理和控制方式有所不同。 步進(jìn)電機(jī)是一種常見(jiàn)的電動(dòng)機(jī),其工作原理是通過(guò)交替通電使電機(jī)轉(zhuǎn)子按照一定的步距旋轉(zhuǎn)。步進(jìn)電機(jī)通常采用開(kāi)環(huán)控制方式,即根據(jù)輸入的脈沖
2023-06-13 08:30:02494 步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來(lái)驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:10649 
步進(jìn)電機(jī)是一種開(kāi)環(huán)控制的電機(jī),通過(guò)輸入脈沖信號(hào)來(lái)控制其轉(zhuǎn)角和方向。主要有以下幾種控制方式。
2023-09-05 10:50:251786 步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)形式和分類方法較多,一般按勵(lì)磁方式分為磁阻式、永磁式和混磁式三種;按相數(shù)可分為單相、兩相、三相和多相等形式。在我國(guó)所采用的步進(jìn)電機(jī)中以反應(yīng)式步進(jìn)電機(jī)為主。步進(jìn)電機(jī)的運(yùn)行性能與控制方式
2023-09-14 08:09:031313 
步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào),加以放大以驅(qū)動(dòng)步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比,控制步進(jìn)電機(jī)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位。
2023-10-19 10:59:42262 
基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過(guò)測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162584 
本節(jié)介紹用定時(shí)器定時(shí)的方式,精準(zhǔn)控制脈沖時(shí)間,從而控制步進(jìn)電機(jī)速度
2023-10-26 14:14:58613 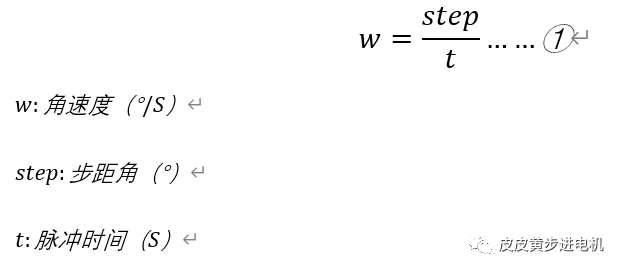
步進(jìn)電機(jī)是一種在控制系統(tǒng)中常見(jiàn)的電機(jī)類型,它以步進(jìn)角度為單位進(jìn)行旋轉(zhuǎn),并且可以精確控制位置和速度。在許多應(yīng)用領(lǐng)域,如精密儀器、印刷設(shè)備和醫(yī)療設(shè)備中,步進(jìn)電機(jī)都得到廣泛使用。 為了實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的精確
2024-01-19 10:50:22506 步進(jìn)電機(jī)是一種電動(dòng)機(jī)的類型,它以準(zhǔn)確的固定角度步進(jìn)方式運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)內(nèi)部包含電磁鐵和旋轉(zhuǎn)式永磁轉(zhuǎn)子,通過(guò)電流的變化控制電磁鐵的磁場(chǎng)強(qiáng)度,從而產(chǎn)生扭矩,驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。步進(jìn)電機(jī)通常用于需要準(zhǔn)確位置控制
2024-01-22 10:15:59209 步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見(jiàn)的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:18318 什么是步進(jìn)電機(jī)的細(xì)分控制?步進(jìn)電機(jī)為什么要細(xì)分,如何細(xì)分? 步進(jìn)電機(jī)的細(xì)分控制是一種控制技術(shù),通過(guò)對(duì)電機(jī)驅(qū)動(dòng)信號(hào)的細(xì)分來(lái)實(shí)現(xiàn)提高電機(jī)精度和減小振動(dòng)、噪音的目的。步進(jìn)電機(jī)是一種常用的電機(jī)類型,它通過(guò)
2024-02-18 09:39:32700
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論