 電子發燒友App
電子發燒友App


步進電機基礎知識
每個電機都會轉換功率。電動機將電能轉化為運動。步進電機將電能轉化為旋轉。步進電機不僅可以將電能轉化為旋轉,而且可以非常精確地控制旋轉的距離和速度。
步進電機之所以如此命名,是因為每個電脈沖都會使電機轉動一步。步進電機由驅動器控制,驅動器將脈沖發送到電機中使其轉動。電機轉動的脈沖數等于饋入驅動器的脈沖數。電機將以等于這些相同脈沖頻率的速率旋轉。
步進電機非常容易控制。大多數驅動器正在尋找 5 伏脈沖,這恰好是大多數集成電路的電壓電平。您只需要設計一個輸出脈沖的電路或使用東方馬達的脈沖發生器之一。
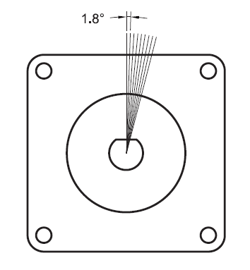
步進電機最顯著的特點之一是它們能夠非常準確地定位。稍后將對此進行深入介紹。步進電機并不完美,總會有一些小的不準確之處。ORIENTAL MOTOR 的標準步進電機的精度為 ± 3 弧分 (0.05°)。不過,步進電機的顯著特點是這種誤差不會逐步累積。當標準步進電機移動一步時,它將移動 1.8° ± 0.05°。如果同一臺電機行進一百萬步,它將行進 1,800,000° ± 0.05°。錯誤不會累積。
步進電機可以快速響應和加速。它們具有低轉子慣性,可以快速加速。因此,步進電機非常適合短距離、快速移動。
步進電機系統
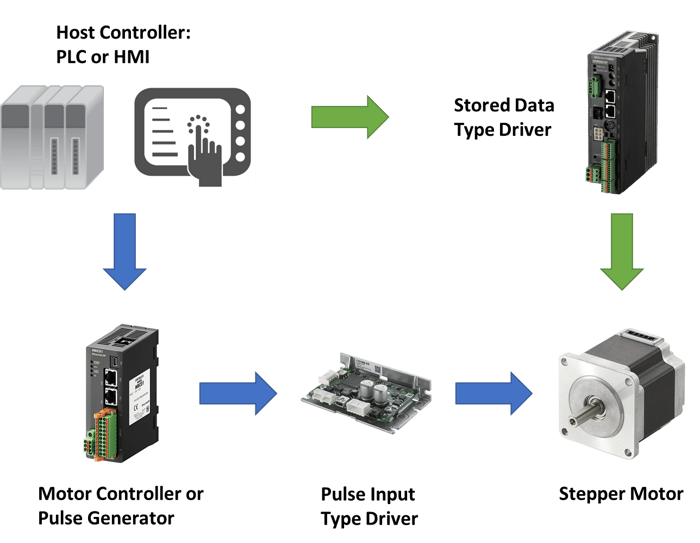
下圖顯示了一個典型的基于步進電機的系統。所有這些部分都必須以一種或另一種形式存在。每個組件的性能都會對其他組件產生影響。
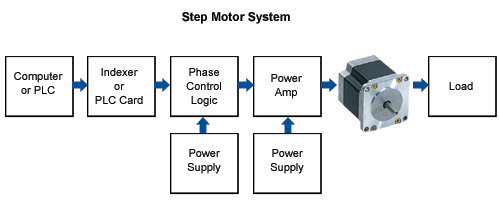
第一個組件是計算機或 PLC。這是系統背后的大腦。計算機不僅控制步進電機系統,而且還將控制機器的其余部分。它可能會升起電梯或推進傳送帶。它可以像 PC 或 PLC 一樣復雜,也可以像操作員按鈕一樣簡單。
第二部分是分度器或 PLC 卡。這告訴步進電機要做什么。它將輸出電機移動的正確脈沖數并改變頻率,以便電機加速,以一定速度運行,然后減速。
這可能是一個單獨的組件,如 ORIENTAL MOTOR SG8030 分度器或滑入 PLC 的脈沖發生器卡。形式是無關緊要的,但它必須存在才能使電機移動。
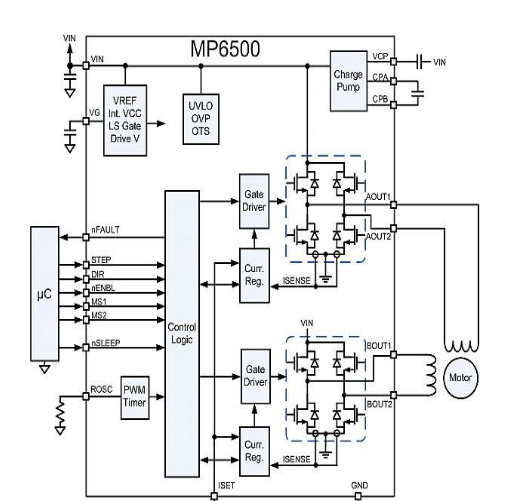
接下來的四個框組成電機驅動器。相位控制邏輯從分度器獲取脈沖并確定應為電機的哪一相通電。相位必須按特定順序通電,相位控制邏輯負責處理這一點。邏輯電源是為驅動器中的 IC 供電的低電平電源。這取決于芯片組或應用設計,但大多數邏輯電源都在 5 伏范圍內。電機電源是為電機供電的電源電壓。此電壓水平通常在 24 VDC 范圍內,但也可能更高。最后,功率放大器是允許電流為相位供電的晶體管組。它們不斷地打開和關閉,以按照正確的順序移動電機。
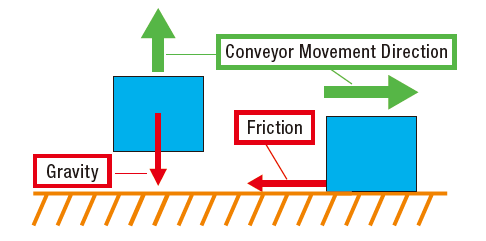
所有這些組件都會指示電機移動負載。負載可以是絲杠、圓盤或傳送帶。
步進電機的類型
目前有三種通用類型的步進電機。
可變磁阻 (VR)
永久磁鐵 (PM)
雜交種
ORIENTAL MOTOR 只生產混合式步進電機。
可變磁阻步進電機的轉子和定子上都有齒,但沒有磁鐵。因此它沒有制動力矩。永磁體有一個用于轉子的磁鐵,但沒有齒。通常,PM 磁鐵的步距角很粗糙,但它確實有制動力矩。
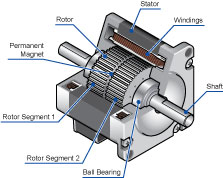
混合式步進電機結合了永磁體的磁體和可變磁阻電機的齒。磁鐵是軸向磁化的,這意味著在右圖中,上半部分是北極,下半部分是南極。磁鐵上有兩個帶 50 個齒的帶齒轉子杯。兩個杯錯開 3.6°,因此如果我們向下看北極杯上兩個齒之間的轉子,我們會看到正中間的南極杯上的一個齒。
這些電機為兩相結構,每相 4 個極。彼此相隔 90° 的磁極構成每一相。每相都繞線,使極 180° 為相同極性,而相隔 90° 為相反極性。如果該相中的電流反轉,極性也會反轉。這意味著我們可以將任何定子極制成北極或南極。
轉子上有50個齒。齒間距為 7.2°。當電機移動時,一些轉子齒與定子齒不對齊 3/4 齒距、1/2 齒距和 1/4 齒距。當電機步進時,它會走最簡單的路線,因為 7.2° 的 1/4 是 1.8°,電機每步移動 1.8°。
最后,扭矩和精度取決于極(齒)數。磁極越大,扭矩和精度越好。ORIENTAL MOTOR 提供“高分辨率”步進電機。這些電機的齒距是我們標準電機的一半。轉子有 100 個齒,齒間夾角為 3.6°。當電機移動 1/4 齒距時,它移動 0.9°。我們的“高分辨率”型號的分辨率是標準型號的兩倍,每轉 400 步,而每轉 200 步。
較小的步進角意味著較低的振動,因為我們沒有每一步都走得那么遠。
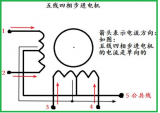
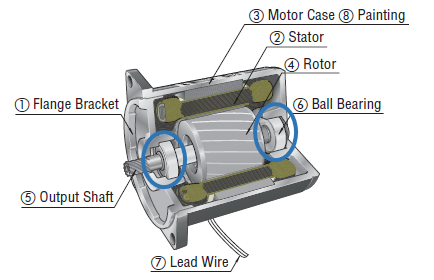
結構
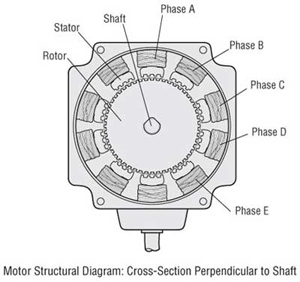
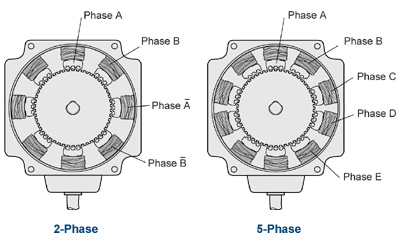
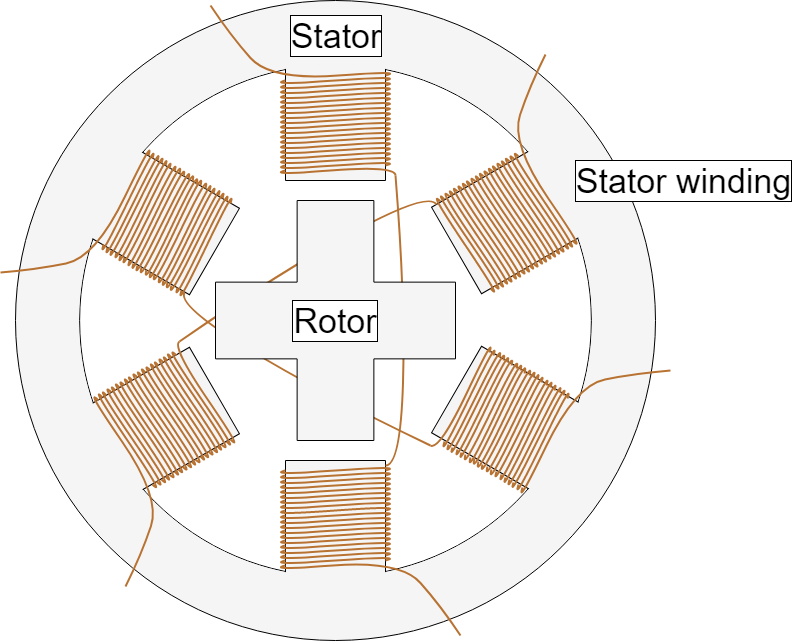
下圖顯示了 5 相步進電機的橫截面。步進電機主要由兩部分組成:定子和轉子。轉子又由三個部件組成:轉子杯 1、轉子杯 2 和永磁體。轉子在軸向方向被磁化,因此,例如,如果轉子杯 1 被極化為北極,則轉子杯 2 將被極化為南極。
定子有10個帶小齒的磁極,每個極上有一個繞組。
每個繞組都連接到相反極的繞組,以便當電流通過該對繞組時,兩個極都被磁化為相同的極性。(使電流流過給定繞組會磁化相同極性(即北極或南極)的相對對極。)
相對的一對磁極構成一個相。由于這種特殊的電機有 10 個磁極,即 5 個相,因此稱為 5 相步進電機。
每個轉子的外周有 50 個齒,轉子杯 1 和轉子杯 2 的齒彼此機械偏移半個齒距。
速度-扭矩
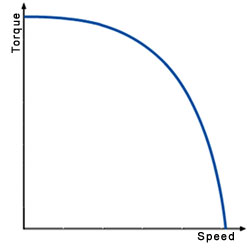
知道如何閱讀速度-扭矩曲線非常重要,因為它會告訴我們電機可以做什么和不能做什么。速度-扭矩曲線代表給定的電機和給定的驅動器。電機運行后,其扭矩取決于驅動器類型和電壓。當與不同的驅動器一起使用時,相同的電機可能具有非常不同的速度-扭矩曲線。
ORIENTAL MOTOR給出速度-扭矩曲線供參考。如果電機與類似的驅動器一起使用,具有類似的電壓和類似的電流,您應該獲得類似的性能。參考下面的交互速度-扭矩曲線:
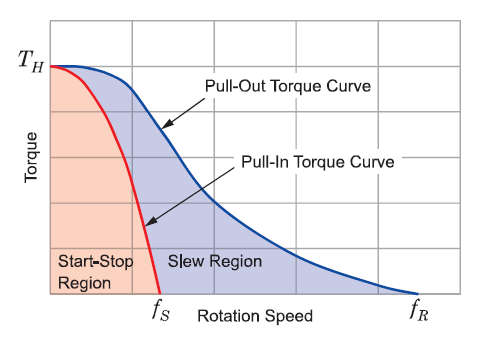
讀取速度-扭矩曲線
保持扭矩
當額定電流流過繞組時,電機在靜止時產生的扭矩量。
啟動/停止區域
電機可以立即啟動、停止或反轉的值。
牽引扭矩
電機可以與輸入脈沖同步啟動、停止或反轉的扭矩和速度值。
Pullout Torque
電機可以與輸入相位同步運行的扭矩和速度值。電機在不失速的情況下可以提供的最大值。
最大啟動速度
電機在空載時可以啟動的最大速度。
最大運行速度
電機運行的最快速度,在無負載的情況下測得。
為了在拉入和拉出之間的區域運行,電機必須首先在啟動/停止區域啟動。然后增加脈沖率,直到達到所需的速度。停止時,電機速度會降低,直到它低于牽引扭矩曲線。
扭矩與電流和導線匝數成正比。如果我們想增加20%的扭矩,我們應該增加20%左右的電流。同樣,如果我們想將扭矩降低 50%,則將電流降低 50%。
由于磁飽和,將電流增加到額定電流的 2 倍以上沒有任何優勢。那時電流的增加不會增加扭矩。在大約 10 倍的額定電流下,您將面臨轉子消磁的風險。
我們所有的電機都具有 B 級絕緣,并且在絕緣降級之前可以承受 130°C 的溫度。如果我們允許從內到外有 30° 的溫差,則外殼不應超過 100°C。
電感影響高速扭矩。電感是電機沒有達到無窮大的高扭矩的原因。每個電機繞組都有一定的電感和電阻值。以亨利為單位的電感除以以歐姆為單位的電阻,得出秒的值。該秒數(時間常數)是線圈充電至其額定值的 63% 所需的時間。如果電機的額定電流為 1 安培,經過 1 個時間常數后,線圈的電流將為 0.63 安培。在大約 4 或 5 個時間常數后,線圈將達到 1 安培。由于扭矩與電流成正比,如果電流僅充電至 63%,電機在 1 個時間常數后將只有其扭矩的 63% 左右。
在低速時,這不是問題。電流可以足夠快地進出線圈,因此電機具有額定轉矩。然而,在高速下,電流無法在切換下一相之前足夠快地進入。扭矩減小。
驅動器電壓在高速性能中起著很大的作用。驅動電壓與電機電壓之比越高,高速性能越好。高壓迫使電流以比上述 63% 更快的速度流入繞組。
振動
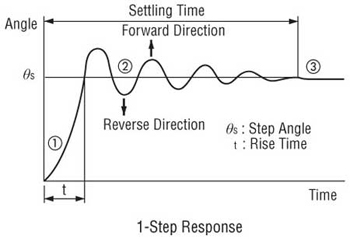
當步進電機從一步移動到下一步時,轉子不會立即停止。轉子實際上通過了最終位置,被拉回,以相反的方向通過最終位置并繼續前后移動,直到它最終停止(見下面的交互圖)。我們稱之為“振鈴”,電機每走一步都會發生這種情況。類似于彈力繩,動量使轉子經過其停止點,然后來回“彈跳”,直到最終停止。然而,在大多數情況下,電機會在停止之前被命令移動到下一步。
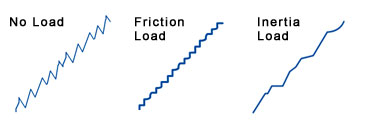
下圖顯示了不同負載條件下的振鈴。卸載時,電機會發出很多響聲。很多鈴聲意味著很多振動。如果電機空載或輕載,電機通常會失速,因為振動太高會失去同步。測試步進電機時,務必確保添加負載。
另外兩個圖表顯示了帶負載的電機。正確加載電機將平滑其性能。負載應要求電機可產生轉矩的 30% 至 70% 之間,負載慣量與轉子慣量之比應在 1:1 至 10:1 之間。對于更短、更快的動作,比例應該接近 1:1 到 3:1。
ORIENTAL MOTOR 應用專家和工程師可以協助確定合適的尺寸。
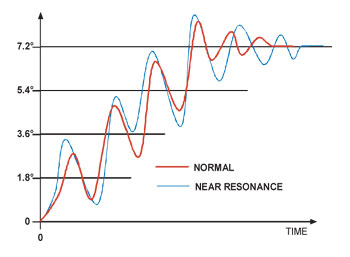
當輸入脈沖頻率與電機的固有頻率匹配時,電機會出現更劇烈的振動。這稱為共振,通常發生在 200Hz 左右。在共振中,過沖和下沖變得更大,漏步的機會也更高。共振隨負載慣性而變化,但通常在200Hz左右。
兩相步進電機只能以四組為一組進行失步。如果您錯過了四的倍數的步數,則振動會導致失去同步性,或者負載太大。如果錯過的步驟不是四的倍數,則很可能是錯誤的脈沖數或電噪聲導致了問題。
有多種方法可以避免共振。最簡單的方法是完全避免這種速度。對于 60 rpm 的兩相電機,200 Hz 并不是非常快。大多數電機的最大啟動速度約為 1000 pps 左右。所以在大多數情況下,您可以以高于諧振速度的速度啟動電機。
如果您必須以低于共振速度的速度啟動,請快速加速通過共振范圍。
另一種解決方案是使步距角更小。對于更大的步距角,電機總是會過沖和下沖更多。如果電機不需要走很遠,它就不會產生足夠的力(扭矩)來過沖。只要步距角變小,電機就不會振動那么大。這就是半步和微步系統在減少振動方面如此有效的原因。
確保電機的尺寸適合負載。通過選擇合適的電機,您可以提高性能。
阻尼器也可用。阻尼器安裝在電機的后軸上并吸收一些振動能量。他們通常會廉價地平滑振動電機。
五相步進電機
步進電機中一項相對較新的技術是 5 相。2 相和 5 相(見下面的交互圖)之間最明顯的區別是定子極數。2 相電機有 8 個極,每相 4 個,而 5 相電機有 10 個極,每相 2 個。轉子與二相電機相同。
While the 2-phase motor moves 1/4 tooth pitch each phase. The 5-phase, because of its construction, moves 1/10 of a tooth pitch. Since the pitch is still 7.2°, the step angle is 0.72°. Simply based on construction, the resolution of the 5-phase has 500 steps per revolution versus the 2-phase with 200 steps per revolution. The 5-phase offers a resolution 2.5 times better than that of the 2-phase.
分辨率越高,步距角越小,從而減少振動。由于 5 相步進角比 2 相小 2.5 倍,因此振鈴和振動要低得多。在 2 相和 5 相中,轉子必須過沖或下沖超過 3.6° 才能失步。由于5相的步距角僅為0.72°,電機幾乎不可能出現3.6°的過沖或下沖。與 5 相步進電機失去同步的可能性非常低。
驅動方式
步進電機有四種不同的驅動方式:
波驅動(整步)
2 相開啟(整步)
1-2 Phases On(半步)
微步
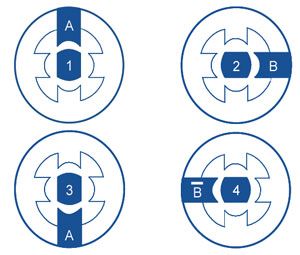
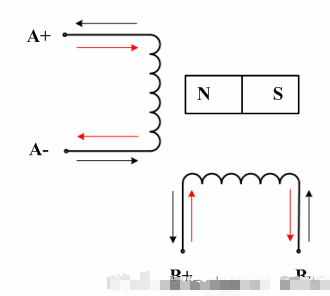
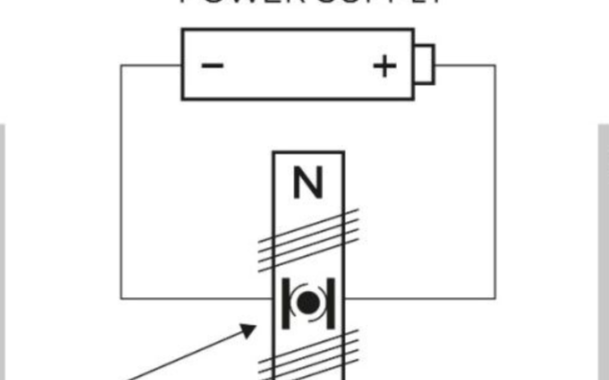
波浪驅動
在下圖中,波驅動方法已被簡化以更好地說明該理論。在圖中,每旋轉 90° 代表實際電機中轉子旋轉 1.8°。
在波驅動方式(也稱為1相ON方式)中,一次只接通一相。當我們給A相的a南極通電時,它就吸引了轉子的北極。我們關閉 A 并打開 B,轉子旋轉 90°(1.8°),依此類推。每次只有一相通電。
波浪驅動器有一個四步電氣序列來旋轉電機。
2 相開
在“2 相接通”方法中,兩相始終通電。
同樣在下圖中,每 90° 代表旋轉 1.8°。如果A相和B相都通電為南極,則轉子的北極將被同等地吸引到兩極并直接在中間排成一行。隨著相的順序通電,轉子將旋轉以在兩個通電極之間對齊。
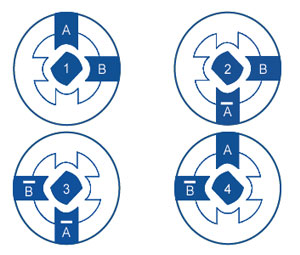
“2 相啟動”方法有一個四步電氣序列來旋轉電機。
ORIENTAL MOTOR的標準2相和2相M型電機采用“2 phase on”方式。
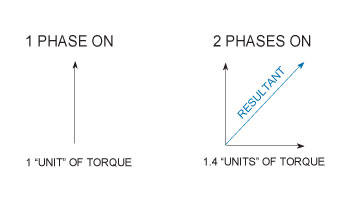
“2 phase on”方法比“1 phase on”方法有什么優勢?答案是扭矩。在“1 phase on”方法中,一次只打開一相,因此我們有一個單位的扭矩作用在轉子上。在“2 相”方法中,我們有兩個單位的扭矩作用在轉子上,1 個在 12 點鐘位置,1 個在 3 點鐘位置。如果我們將這兩個扭矩矢量加在一起,我們會得到一個 45° 的結果,幅度要大 41.4%。通過使用“2 phase on”方法,我們可以獲得與“1 phase on”方法相同的步距角,但扭矩增加了 41%。
五相電機有點不同。我們不使用“兩相開啟”方法,而是使用“四相開啟”方法。每次我們打開其中的 4 個相,電機就會走一步。
五相電機經過 10 步電氣序列。
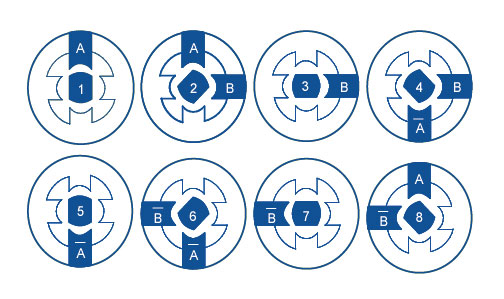
1-2 Phases On(半步)
“1-2 階段”方法或半步結合了前面兩種方法。在這種情況下,我們為 A 相通電。轉子排成一行。此時,我們保持 A 相開啟并為 B 相通電。現在轉子同樣被吸引到中間的兩條線上。轉子已旋轉 45° (0.9°)。現在我們關閉 A 相,但保留 B 相。電機再走一步。等等等等。通過在一相和兩相之間交替,我們將步距角減半。請記住,步距角越小,振動越小。
(對于 5 相電機,我們在 4 相和 5 相之間交替開啟。)
半步模式具有八步電序列。對于采用“4-5 相接通”方法的五相電機,電機經過 20 步電氣序列。
微步
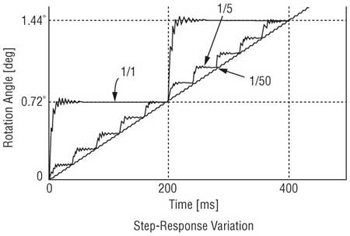
微步進是一種使小步更小的方法。步長越小,分辨率越高,振動特性越好。在微步進中,相位不是完全打開或完全關閉。它部分打開。正弦波應用于 A 相和 B 相,相隔 90°(在五相步進電機中為 0.9°)。
當最大功率在A相時,B相為零。轉子將與 A 相對齊。隨著流向 A 相的電流減小,流向 B 相的電流增加。轉子將向 B 相移動微小的步幅,直到 B 相達到最大值且 A 相為零。該過程圍繞其他階段繼續進行,我們有微步進。
有一些與微步相關的問題,主要是精度和扭矩。由于相位只有部分通電,因此電機轉矩降低,通常降低約 30%。也因為步之間的轉矩差太小,電機有時不能克服負載。在這些情況下,可能會命令電機在實際開始移動之前移動 10 步。在許多情況下,有必要使用增加價格的編碼器來關閉回路。
步進電機系統
開環系統
閉環系統
伺服系統
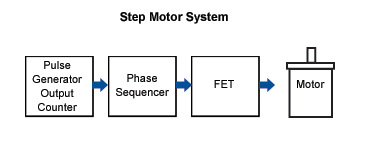
開環
步進電機設計為開環系統。脈沖發生器向相序電路發送脈沖。相序器確定哪些相位需要關閉或打開,如全步和半步信息中所述。定序器控制大功率 FET,然后轉動電機。
然而,對于開環系統,沒有位置驗證,也無法知道電機是否按照指令移動。
閉環
最流行的閉環方法是在雙軸電機的后軸上添加一個編碼器。編碼器由一個薄圓盤組成,上面有線條。光盤在發射器和接收器之間通過。每當一條線出現在兩者之間時,就會在信號線上輸出一個脈沖。這些脈沖被反饋到控制器,控制器對它們進行計數。通常,在移動結束時,控制器會將發送到驅動器的脈沖數與發送回的編碼器脈沖數進行比較。通常會寫一個例程,如果兩個數字不同,則彌補差異。如果數字相同,則沒有錯誤發生并且運動繼續。
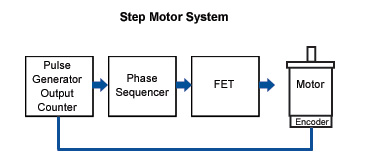
這種方法有兩個缺點:成本(和復雜性)和響應。編碼器的額外成本以及控制器復雜性的增加增加了系統成本。此外,由于修正(如果有的話)是在移動結束時完成的,因此可以將額外的時間添加到系統中。
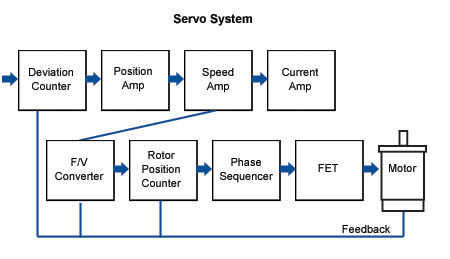
伺服系統
另一種選擇是伺服系統。伺服系統通常是一種低極數電機,可提供高速但沒有固有的定位能力。要使其成為位置設備,需要反饋,通常是編碼器或分解器,以及控制回路。伺服基本上是打開和關閉的,直到解析器計數達到某個點。因此,伺服基于誤差工作。例如,命令伺服器移動 100 轉。解析器計數讀數為零,電機啟動。當解析器計數達到 100 轉時,電機關閉。如果位置偏斜,電機將重新打開以使其回到原位。伺服如何響應錯誤取決于增益設置。如果增益設置高,電機將非常快速地響應任何誤差變化。如果增益設置較低,電機不會對誤差變化做出快速響應。但是,任何涉及時間增益設置的時間延遲都會引入運動控制系統。
AlphaStep 閉環步進電機系統
AlphaStep是東方電機革命性的步進電機產品。AlphaStep 有一個提供位置反饋的內置解析器。在所有時間點,我們都知道轉子在哪里。
?
AlphaStep 驅動程序有一個輸入計數器。計算進入驅動器的所有脈沖。解析器反饋到轉子位置計數器。偏差計數器中存在任何偏差。通常電機運行開環。我們制作扭矩矢量,電機跟隨。如果偏差計數器顯示任何大于 ± 1.8° 的值,相序器將在扭矩位移曲線的較高部分打開扭矩矢量,產生最大扭矩以使轉子恢復同步。如果電機關閉幾步,則定序器會在扭矩位移曲線的較高部分激活多個扭矩矢量。驅動程序最多可以處理 5 秒的過載。如果不能在 5 秒內使電機恢復同步,驅動器將出現故障并發出警報。
AlphaStep 的一大特點是它可以即時糾正錯過的步驟。它不會等到移動結束才進行更正。一旦轉子回到 1.8° 以內,驅動器就會回到開環模式并發出適當的相位能量。
下圖顯示了扭矩位移曲線以及設備處于開環或閉環模式時的情況。扭矩位移曲線是一相產生的扭矩。當轉子齒位移1.8°時產生最大扭矩。如果電機超調超過 3.6°,則電機只會失步。由于驅動器在失步 1.8° 時控制扭矩矢量,因此電機不可能失步,除非過載超過 5 秒。
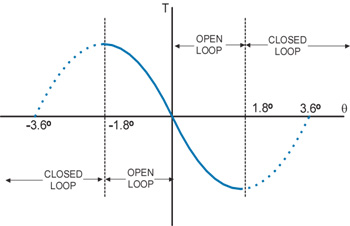
許多人認為 AlphaStep 的步進精度為 ± 1.8°。AlphaStep 的步進精度為 5 弧分 (0.083°)。駕駛員將扭矩矢量控制在 1.8° 之外。一旦在 1.8° 內,轉子齒將與正在生成的扭矩矢量對齊。AlphaStep 確保正確的齒與扭矩矢量對齊。
AlphaStep 有許多版本。ORIENTAL MOTOR 提供具有多種齒輪比的圓軸和齒輪版本,以提高分辨率和扭矩或減少反射慣性。幾乎所有版本都可以配備故障安全磁力制動器。ORIENTAL MOTOR 也有稱為 ASC 系列的 24 VDC 版本。
結論
總之,步進電機非常適合定位應用。只需改變脈沖數及其頻率,就可以在距離和速度方面精確控制步進電機。它們的高極數使它們具有準確性,同時它們運行開環。如果尺寸適合應用,步進電機將永遠不會錯過任何一步。而且因為它們不需要位置反饋,所以它們非常具有成本效益。
審核編輯:湯梓紅














 工商網監
工商網監
評論