干渴狀態(tài)了。”哈工大機器人研究所所長、教育部長江學者特聘教授、“機器人爸爸”孫立寧曾說。 工業(yè)機器人是一個復雜的系統(tǒng)工程,不是買來就能用的,需要對其進行編程,把機器人本體與控制軟件、應用軟件、周邊設備
2015-03-02 11:21:40
若說當下的熱門科技,機器人絕對算一個。機器人作為典型的機電一體化技術密集型產(chǎn)品,它是如何實現(xiàn)運作的呢? 機器人的控制分為機械本體控制和伺服機構控制兩大類,伺服控制系統(tǒng)則是實現(xiàn)機器人機械本體控制
2021-09-17 08:22:50
。 1、自由度 機器人具有的獨立坐標軸運動的數(shù)目。機器人的自由度是指確定機器人手部在空間的位置和姿態(tài)時所需要的獨立運動參數(shù)的數(shù)目。手指的開、合,以及手指關節(jié)的自由度一般不包括在內(nèi)。.機器人的自由度
2017-08-15 14:00:52
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應用有哪些?
2021-07-05 06:48:21
第二章 機器人系統(tǒng)與控制需求簡介2.1 工業(yè)機器人的系統(tǒng)組成機械本體:精密減速機、伺服電機、伺服驅動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機器人本體結構與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
)各軸加潤滑油等2,功能測量1)機器人的當前零位位置與標準標定位置是否一致。 2)打開電機抱閘電壓值,測試各軸電機抱閘功能。3,保養(yǎng)件更換機器人本體油品更換二、 上海仰光電子工控自動化設備有限公司主要
2020-08-19 10:32:02
,機器人本體鑄件進行自動堆碼,可堆碼多層,然后推出,便于叉車運至倉庫儲存。 ZNL-406SCARA工業(yè)機器
2021-07-01 09:49:25
單元模塊可以拆裝到螺釘級。使學生更深入了解工業(yè)現(xiàn)場常用的機器人本體內(nèi)部機械結構、連接、電機、減速器、傳動等。
2021-09-17 08:53:31
基礎、機器人本體、電子控制設備、傳感器與導航和機器人電源系統(tǒng)等。《機器人設計與實現(xiàn)》是按照搭積木的方法指導機器人愛好者如何設計、制作機器人平臺,如何賦予機器人智能,使機器人能夠運動、感知周圍的環(huán)境和服
2017-08-01 18:21:38
得到了廣泛的應用,在我國有大量的需求,工業(yè)機器人系統(tǒng)包括:機器人示教器、控制器、機器人本體三部分組成。本課題所研究的是:基于可裁剪的WinCE6.0嵌入式操作系統(tǒng)的一種基于WinCE的工業(yè)機器人示教器
2015-07-23 22:14:55
申請理由:WiFi機器人項目開發(fā)項目描述:通過手機遙控機器人運動,該開發(fā)板置于機器人上,手機通過WiFi發(fā)送控制信號,Tisan物聯(lián)網(wǎng)開發(fā)板將接收的信號通過串口或網(wǎng)口發(fā)送給機器人本體,機器人本體作出相應的動作。
2015-10-15 10:09:42
紛紛采取降價的手段進一步削弱國產(chǎn)機器人的市場競爭力。潘偉預計2016年,在機器人本體領域的競爭將愈加激烈,大部分國產(chǎn)本體廠商將在盈虧平衡點上掙扎。 機器人邁入2.0時代 人機協(xié)作成為熱點 從智能化
2015-12-29 10:54:26
上游的核心零部件,如控制器、伺服系統(tǒng)、傳動結構、傳感技術等都掌握在國外廠商手中。在機器人產(chǎn)業(yè)的中游,企業(yè)主要是利用上游零部件設計機器人結構和控制箱,做一個標準機器人——機器人本體。面對與國外廠商的直接
2015-12-29 15:56:47
,促進機器人功能部件企業(yè)和本體企業(yè)對接,促進機器人本體企業(yè)、系統(tǒng)集成企業(yè)和用戶企業(yè)對接,促進機器人企業(yè)與大學、科研院所對接;3、創(chuàng)新機器人產(chǎn)業(yè)發(fā)展模式,鼓勵探索開展機器人融資租賃業(yè)務,發(fā)揮金融杠桿作用
2015-02-12 10:00:04
關于kuka庫卡機器人保養(yǎng)注意事項——庫卡機器人發(fā)表時間:2020-07-15一、庫卡工業(yè)機器人本體維護保養(yǎng)1、普通維護1)清洗機械手定期清洗機械手底座和手臂;可使用高壓清洗設備,但應避免直接向
2021-09-08 07:02:29
和焊接設備兩部分。機器人由機器人本體和控制柜(硬件及軟件)組成。而焊接裝備,以弧焊及點焊為例,則由焊接電源,(包括其控制系統(tǒng))、送絲機(弧焊)、焊槍(鉗)等部分組成。對于智能機器人還應有傳感系統(tǒng),如
2019-04-13 10:30:39
生產(chǎn)情況一樣,并且機器人沒有任何故障報警。發(fā)那科2000iB/210F機器人焊接時出現(xiàn)焊點整體偏移故障維修原因:根據(jù)機器人故障講述,導致此種機器人故障原因可能是:①機器人本體或機器人焊鉗機械變形或偏移
2020-09-07 15:40:22
一前言針對機器人相關專業(yè)的教學需求,商飛信息科技開發(fā)出此開源六自由度協(xié)作機器人實驗平臺。該平臺有以下幾大特色機器人本體采用自主設計的3Kg負載六自由度協(xié)作機器人,機器人每個關節(jié)集成電機、減速器和驅動
2021-09-07 07:10:14
本實驗箱以大載重的全向麥輪車為載體,基于ROS系統(tǒng)作為開發(fā)平臺,使用雙驅和四驅兩種不同的結構作為機器人本體,最終通過地面二維碼實現(xiàn)導航機器人的精確方向和距離控制...
2021-09-03 07:29:36
機械本身的一些硬件出現(xiàn)了問題。做好安川機器人保養(yǎng)可以在一定程度上降低機器人運行過程中出現(xiàn)故障的幾率。一、本體標準保養(yǎng)常規(guī)檢查1、本體清潔根據(jù)現(xiàn)場工作對機器人本體進行除塵清潔。2、本體和6軸工具端固定
2020-09-08 16:15:24
移動機器人是一種能夠感知外部環(huán)境,在有障礙物的環(huán)境中能夠實現(xiàn)動態(tài)決策與規(guī)劃,從而完成避障等多種功能的綜合系統(tǒng)。機器人系統(tǒng)通常分為機構本體和控制系統(tǒng)兩部分,控制系統(tǒng)的作用是根據(jù)用戶的指令對機構本體進行
2020-03-06 07:07:07
,將從驅動器、電機和本體三個部分來介紹。1、伺服驅動層機器人關節(jié)的驅動是由電機完成的,作為機器人運動控制的最底層,伺服驅動的目的是改善驅動器的動態(tài)特性,提高伺服和抗擾性能。常說的三環(huán)控制(位置環(huán)、速度環(huán)
2021-06-28 09:29:31
,主要的是減速機和控制系統(tǒng),這相當于機器人的”大腦“,中游是機器人本體,就是機器人的”身體“,下游是系統(tǒng)集成商,國內(nèi)95%的企業(yè)都集中在這個環(huán)節(jié)上。”目前機器人上游利潤價值最高,僅僅減速機占機器人成本
2017-02-14 14:16:18
機器人1、機器人本體1)具有6個自由度,串聯(lián)關節(jié)型工業(yè)機器人;2)重復定位精度:±0.01mm;3)承重能力:3kg;4)水平到達距離: ≥580mm;5)重量: ≥27kg;6)各軸運動范圍J1軸≥±180J2軸≥-155°/+5°J3軸≥-25°/+240°J4軸≥±180°J5
2021-07-01 11:06:26
工業(yè)機器人的定義是什么?有哪些特點?工業(yè)機器人有哪幾個子系統(tǒng)組成?各自的作用是什么?工業(yè)機器人的主要技術參數(shù)有哪些?
2021-07-05 07:20:36
、逆向運動學求解,以實現(xiàn)機器人的操作空間坐標和關節(jié)空間坐標的相互轉換,完成機器人的軌跡規(guī)劃任務,實現(xiàn)高速伺服插補運算、伺服運動控制。控制器主要分為硬件和軟件兩部分:硬件是指工業(yè)控制板卡,包括主控單元
2017-08-23 15:10:27
`工業(yè)機器人的核心部件包括機器人本體、減速器、伺服電機、控制系統(tǒng)等四大部分,這4部分分別占總成本的22%、24%、36%、12%。 筆者從中國國際機器人展覽會上了解到,目前新時達(002527
2015-02-12 10:17:59
、巨石、德力西等多家知名企業(yè)。 但是比較國外同類產(chǎn)品,國產(chǎn)機器人還是存在差距。究其原因,是中國精密制造業(yè)的歷史欠賬太多。雖然國內(nèi)機器人經(jīng)過30年的發(fā)展,在機器人本體、控制系統(tǒng)、電機等部分上所研發(fā)的機器
2015-12-17 14:53:56
未來家庭的監(jiān)控機器人應該要具備以下特征:1.擬人化設計,具有可愛的操作接口讓人很容易從遠 端監(jiān)控.2.監(jiān)控機器人可以儲存所看到的影像,并通過遠程傳給家庭主人.3.監(jiān)控機器人本身要有基本的感知
2019-10-30 02:25:39
機甲大師機器人軟件單元包括哪些?
2021-11-22 07:10:42
、焊接參數(shù)等,并自動生成一個連續(xù)執(zhí)行全部操作的程序。完成示教后,只需給機器人一個起動命令,機器人將精確地按示教動作,一步步完成全部操作,實際示教與再現(xiàn)。焊接機器人結構:1、機器人本體:一般是伺服電機驅動
2020-11-16 16:18:45
時,應有的放矢。根據(jù)機器人工作環(huán)境、焊接要求選擇機器人的配置是成功使用焊接機器人的必要條件。通常焊接機器人系統(tǒng)除包括機器人本體外,還包括變位機、焊接電源和其他外圍設備。所以,焊接機器人的傳感裝置除
2020-06-16 09:48:50
,工業(yè)機器人也在不斷完善。就本項目而言,傳統(tǒng)的工業(yè)貨運機器人在面對如今日益復雜的工廠環(huán)境中顯露的不足日益明顯,因此研究開發(fā)新的工業(yè)送貨機器人日益迫切。其實,貨運機器人本質就是循跡加電機速度控制算法,循跡
2021-11-30 08:21:33
變得更加普遍,同時,它們所具有的功能也會越來越多。機器人示教器是機器人控制系統(tǒng)中的重要組成部分,主要實現(xiàn)用戶與機器人控制器,用戶與機器人本體之間的通信。機器人控制器接收到示教器的運動指令后經(jīng)過譯碼、邏輯
2017-03-16 14:42:26
我國涉及機器人生產(chǎn)及集成應用的企業(yè)800余家,其中200多家是機器人本體制造企業(yè)。但大部分企業(yè)以組裝和代加工為主。
2016-12-16 14:56:26 554
554 。它對穩(wěn)定、提高產(chǎn)品質量,提高生產(chǎn)效率改善勞動條件和產(chǎn)品的快速更新?lián)Q代起著十分重要的作用。 焊接機器人是從事焊接(包括切割與噴涂)的工業(yè)機器人,它主要包括機器人和焊接設備兩部分。其中,機器人由機器人本體和控制柜
2017-09-20 16:28:35 0
0 機器人的本體結構指其機體結構和機械傳動系統(tǒng),也是機器人的支承基礎和執(zhí)行機構。進行機器人本體的運動學、動力學和其他相關分析時,一般將機器人簡化成由連桿、關節(jié)和末端執(zhí)行器首尾相接,通過關節(jié)相連而構成
2017-10-13 11:48:1219 ABB 機器人硬件系統(tǒng)是由兩部分組成,即機器人本體和控制柜。機器人本體。機器人本體是由六個轉軸組成的機構,每個轉軸都帶有一個西門子生產(chǎn)的交流伺服電機。同時電機自帶的編碼器反饋信號給驅動器,驅動器根據(jù)
2017-10-13 14:41:465 弧焊機器人主要應用于各類汽車零部件的焊接生產(chǎn)。在該領域,國際大弧焊機器人型工業(yè)機器人生產(chǎn)企業(yè)主要以向成套裝備供應商提供單元產(chǎn)品為主。弧焊機器人系統(tǒng)基本組成如下:機器人本體、控制系統(tǒng)、示教器、焊接電源、焊槍、焊接夾具、安全防護設施。
2017-10-17 14:19:3318 機器人本體,其臂部一般采用空間開鏈連桿機構,其中的運動副(轉動副或移動副)常稱為關節(jié),關節(jié)個數(shù)通常即為機器人的自由度數(shù)。根據(jù)關節(jié)配置型式和運動坐標形式的不同,機器人執(zhí)行機構可分為直角坐標式、圓柱坐標
2017-10-17 16:00:1815 焊接機器人主要包括機器人和焊接設備兩部分。機器人由機器人本體和控制柜(硬件及軟件)組成。而焊接裝備,以弧焊及點焊為例,則由焊接電源,(包括其控制系統(tǒng))、送絲機(弧焊)、焊槍(鉗)等部分組成。對于智能機器人還應有傳感系統(tǒng),如激光或攝像傳感器及其控制裝置等。
2017-10-18 16:04:319 機器人本體,其臂部一般采用空間開鏈連桿機構,其中的運動副(轉動副或移動副)常稱為關節(jié),關節(jié)個數(shù)通常即為機器人的自由度數(shù)。根據(jù)關節(jié)配置型式和運動坐標形式的不同,機器人執(zhí)行機構可分為直角坐標式、圓柱坐標
2018-01-02 11:08:054 1.ABB機器人支持多任務(每臺機器人本體最多一個運動任務)。
2.使用多任務,機器人要有623-1 multitasking選項;
3.如何新建多任務?
4.控制面板,配置;
5.主題controller
2018-06-11 19:30:4331127 
機器人電動伺服驅動系統(tǒng)是利用各種電動機產(chǎn)生的力矩和力,直接或間接地驅動機器人本體以獲得機器人的各種運動的執(zhí)行機構。
2018-07-17 14:50:3915655 本文以FANUC機器人R-2000i系列為例。對R-2000i機器人進行更換本體電纜操作,該型號的本體電纜分為動力電纜和編碼器電纜,更換的方法類似。
2018-07-30 17:21:308952 
工業(yè)機器人行業(yè)按產(chǎn)業(yè)鏈分為上游、中游和下游。上游生產(chǎn)核心零部件:包括減速器、伺服系統(tǒng)、控制器;中游是本體生產(chǎn)商,包括工業(yè)機器人本體。下游是系統(tǒng)集成商,包括單項系統(tǒng)集成商、綜合系統(tǒng)集成商。
2018-08-14 09:35:008829 2018年工業(yè)機器人市場將保持強勁增長態(tài)勢,預計上述三種機器人本體銷售額將突破200億元,到2020年有望接近300億元。
2018-08-17 17:42:27395 裝配機器人的出現(xiàn),可大幅度提高生產(chǎn)效率,保證裝配精度,減輕勞動者生產(chǎn)強度。目前裝配機器人在工業(yè)機器人應用領域中占有量相對較少,其主要原因是裝配機器人本體要比搬運、涂裝、焊接機器人本體復雜。
2018-10-25 08:46:1414525 機器人電動伺服驅動系統(tǒng)是利用各種電動機產(chǎn)生的力矩和力,直接或間接地驅動機器人本體以獲得機器人的各種運動的執(zhí)行機構。
2018-11-21 16:17:2211143 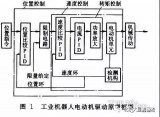
工業(yè)機器人由本體機械部分、控制系統(tǒng)、動力系統(tǒng)三大部分構成的。本體機械部分就是工業(yè)機器人本身多關節(jié)機械臂,以及末端的夾具部分構成。在機械臂上還含有多臺動力裝置,以確保每個關節(jié)臂都能夠獨立動作。各個機械臂的協(xié)調工作,就是由我們的控制系統(tǒng)來調控的了。
2019-01-31 11:49:002171 焊接機器人主要包括機器人和焊接設備兩部分。機器人由機器人本體和控制柜(硬件及軟件)組成。而焊接裝備,以弧焊及點焊為例,則由焊接電源,(包括其控制系統(tǒng))、送絲機(弧焊)、焊槍(鉗)等部分組成。對于智能機器人還應有傳感系統(tǒng),如激光或攝像傳感器及其控制裝置等。
2019-02-26 15:05:099848 挖掘機器人由挖掘機器人本體機械系統(tǒng)、紅外傳感器組成的傳感器系統(tǒng)、直流電機驅動系統(tǒng)、以AVR單片機為核心的控制系統(tǒng)等四部分組成
2019-03-15 14:27:00895 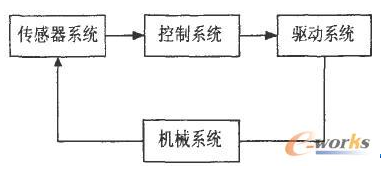
一個是從機器人本體到核心零部件的布局,一個是從核心零部件到本體的延伸,而今,都站在了風口浪尖上。
2019-05-05 14:22:474738 要使機器人運行起來, 需給各個關節(jié)即每個運動自由度安置傳動裝置 作用:提供機器人各部位、各關節(jié)動作的原動力。
2019-05-16 14:41:5711336 
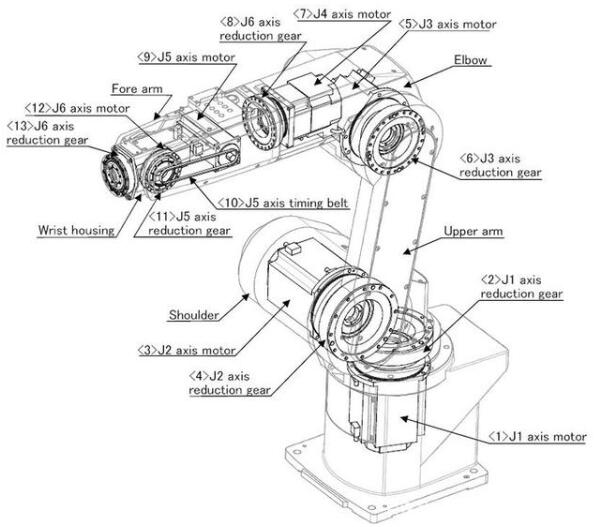
關于機器人本體結構,我們先來看一張本體結構形式圖。
2019-06-05 17:22:0817886 即便國產(chǎn)機器人本體性能真的已經(jīng)做到跟國外品牌很接近甚至超過國外品牌,誰來推?靠本體企業(yè)自己顯然是不夠的。
2019-06-18 09:22:083475 國產(chǎn)機器人本體企業(yè)沒有好的經(jīng)銷渠道,如果是這樣,即便國產(chǎn)機器人本體性能真的已經(jīng)做到跟國外品牌很接近甚至超過國外品牌,誰來推?靠本體企業(yè)自己顯然是不夠的。
2019-06-21 16:28:433292 將在這一新生產(chǎn)基地生產(chǎn)6軸機器人、平面關節(jié)機器人、并聯(lián)機器人等機器人本體,并開展行業(yè)機器人集成運用系統(tǒng)的研發(fā)和制造。
2019-07-17 17:34:17379 本書以典型機器人的結構和應用為突破口,系統(tǒng)介紹了現(xiàn)代工業(yè)機器人的相關知識。全書分九章,包括概論,工業(yè)機器人本體結構,工業(yè)機器人的運動學和力學分析,工業(yè)機器人的驅動,工業(yè)機器人控制技術,工業(yè)機器人的感覺系統(tǒng),工業(yè)機器人的語言,工業(yè)機器人的總體設計,工業(yè)機器人的應用等內(nèi)容。
2019-08-08 08:00:000 從近年趨勢來看,我國機器人產(chǎn)業(yè)進入到了快速的發(fā)展,從機器人本體到核心零部件都取得了非常明顯的進步,但我國機器人的產(chǎn)業(yè)依舊面臨著一定的問題。
2019-10-22 09:28:38712 本體結構:機體結構和機械傳動系統(tǒng),也是機器人的支承基礎和執(zhí)行機構。機器人本體的基本結構形式
2019-11-01 11:49:5912 丹麥的機器人世界大型公司“環(huán)球機器人”展示的協(xié)作機器人。展示的機器人是該公司的新產(chǎn)品,可以搬運比以前的可搬運重量10千克更重的16千克,使用用途擴大了。該公司生產(chǎn)的只有機器人本體(就是所謂的手臂部分),前端的“手”部分是其他公司的產(chǎn)品。
2019-12-29 10:01:381671 工業(yè)機器人產(chǎn)業(yè)鏈包括上游核心零部件、中游機器人本體和下游集成應用三部分。
2020-03-04 09:15:251218 云端機器人由云端大腦、神經(jīng)網(wǎng)絡VBN和及機器人本體等組成。其中,云端大腦提供機器人所需要的智能視覺、智能聽覺、智能運動等多模態(tài)AI能力,通過遍布全球的移動通信安全高速網(wǎng)絡,將能力傳輸給遠端的機器人控制器和各種機器人、智能設備本體上。
2020-07-01 09:50:462483 機器人裝配的精度要求越高,需要的治具的精度也越高。治具的精度越高,機器人本體的精度越難以每次都準確、可靠的裝配。
2020-08-01 09:21:02806 機器人本體就是指工業(yè)機器人的機械部分,又叫操作機,是工業(yè)機器人的操作機構,是指工業(yè)機器人的原樣和自身。整體機器人還其它的配套軟件和配套設備組成。機器人本體基本結構由五部分組成:1、傳動部件;2、機身及行走機構;3、臂部;4、腕部;5、手部。
2020-08-07 15:00:5012494 隨著機器人各相關技術的不斷發(fā)展,機器人本體功能越來越趨于模塊化,機器人的核心控制部分已經(jīng)逐漸從機器人本體中分離出來。以我們自行設計、開發(fā)的“TUT03-A型醫(yī)療服務機器人”為代表的基于遠程腦概念[1,2]的機器人,將大腦脫離機器人本體,大腦置于母環(huán)境中,并用無線通訊與本體進行交互。
2020-08-10 17:54:49633 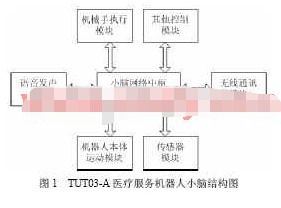
機器人系統(tǒng)由機器人本體和控制柜組成,機器人本體就是機械結構部分,控制柜是控制機器人本體的電氣裝置,本體和控制柜的連接其實就是動力線和信號線的連接,另外還需要注意接地線的連接。
2020-08-24 09:21:406435 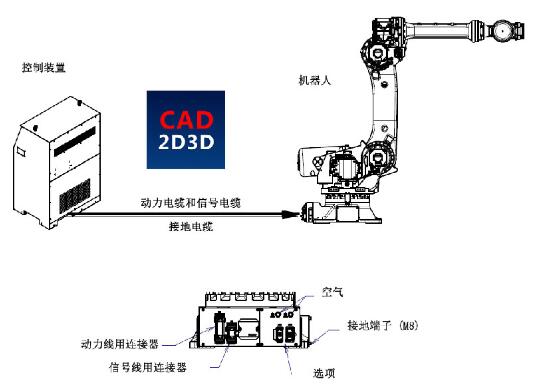
、步態(tài)規(guī)劃以及控制方案等,一個功能齊全的雙足步行機器人必須有一個結構緊湊、設計合理的機械本體。因此在進行深入研究之前,有必要先討論機器人本體。
2020-10-19 08:00:000 多關節(jié)機器人作為占比最大的本體類型,輕小負載產(chǎn)品(負載≤20kg)同質化嚴重,價格競爭愈演愈烈,系內(nèi)外資工業(yè)機器人廠商較量的主戰(zhàn)場,同時也是增速下滑最明顯的細分產(chǎn)品之一。中大負載產(chǎn)品(負載>20kg)國產(chǎn)廠商開始著重布局,但與外資差距尚存差距,針對細分領域的定制化開發(fā)本體或有較大機會;
2020-11-30 16:43:482478 工業(yè)機器人產(chǎn)業(yè)鏈中,為什么還會細分出本體制造商和系統(tǒng)集成商?兩者都有哪些區(qū)別?今天我們來談談這個問題。
2021-01-27 11:08:323750 在工業(yè)機器人的應用過程中,通常是對機器人本體進行符合使用條件的選型,末端執(zhí)行器則是針對不同的使用行業(yè)以及環(huán)境進行定制。 對于機器人本體的選型,主要的選型原則為:有效負載、應用行業(yè)、最大動作范圍、運轉
2021-01-30 10:17:082218 在安裝機器人之前,首先要檢查設備是否缺件,用眼睛觀察機器人是否完好無損。然后安裝控制柜,用叉車或吊車吊裝機器人本體。最后連接機器人本體與控制柜,機器人與控制柜的連接主要是電動機動力電纜與轉數(shù)計數(shù)器電纜、用戶電纜的連接。
2021-03-29 11:44:288051 
編者按 在工業(yè)機器人的應用過程中,通常是對機器人本體進行符合使用條件的選型,末端執(zhí)行器則是針對不同的使用行業(yè)以及環(huán)境進行定制。 對于機器人本體的選型,主要的選型原則為:有效負載、應用行業(yè)、最大
2021-06-03 09:17:582368 工業(yè)機器人產(chǎn)業(yè)鏈主要是由機器人零部件生產(chǎn)企業(yè)、機器人本體生產(chǎn)企業(yè)、代理商、系統(tǒng)集成商、最終用戶構成。本體是機器人產(chǎn)業(yè)鏈的核心,通常,本體企業(yè)設計本體、編寫軟件,采購通過代理商銷售給系統(tǒng)集成商,系統(tǒng)集成商直接面向終端客戶。有的本體企業(yè)和代理商也會兼做系統(tǒng)集成商。
2022-07-07 11:35:011794 帕斯科(山東)機器人科技有限公司經(jīng)銷批發(fā)的碼垛機器人,與多家零售商和代理商建立了長期穩(wěn)定的合作關系。帕斯科(山東)機器人科技有限公司經(jīng)銷的碼垛機器人的品種齊全、價格合理。歡迎新老客戶來我司洽談合作。咨詢電話:15662018863
2022-11-06 09:40:54183 
是從事焊接(包括切割與噴涂)的工業(yè)機器人,主要包括工業(yè)機器人和焊接設備兩部分組成。機器人又由機器人本體和控制柜組成。對于智能焊接機器人,還需要激光或者視覺傳感器以及智能控制設備。
2022-11-25 11:38:541843 帕斯科(山東)機器人科技有限公司經(jīng)銷批發(fā)的碼垛機器人,與多家零售商和代理商建立了長期穩(wěn)定的合作關系。帕斯科(山東)機器人科技有限公司經(jīng)銷的碼垛機器人的品種齊全、價格合理。歡迎新老客戶來我司洽談合作。咨詢電話:15662018863
2022-12-06 11:54:431531 
方案介紹該系統(tǒng)能夠基于機器人操作系統(tǒng) (ROS) 控制多個伺服系統(tǒng)。ROS 是一組軟件庫和工具,由許多公司作為開源維護,可幫助設計人員構建機器人應用程序。Renesas 的RA6M5
2022-12-12 17:53:141 焊接機器人的結構有哪些?焊接機器人是由機器人本體、控制柜、電源、焊槍、送絲結構、示教器、傳感器以及輔助設備焊接變位機和安全系統(tǒng)組成的。
2023-01-10 13:03:466195 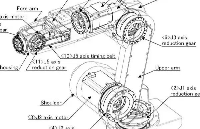
工業(yè)機器人產(chǎn)業(yè)鏈主要是由機器人零部件生產(chǎn)企業(yè)、機器人本體生產(chǎn)企業(yè)、代理商、系統(tǒng)集成商、最終用戶構成。本體是機器人產(chǎn)業(yè)鏈的核心,通常,本體企業(yè)設計本體、編寫軟件,采購通過代理商銷售給系統(tǒng)集成商,系統(tǒng)集成商直接面向終端客戶。
2023-02-02 11:02:411403 工業(yè)機器人產(chǎn)業(yè)鏈包括上游、中游、下游三大環(huán)節(jié)。上游主要提供工業(yè)機器人生產(chǎn)所需核心零部件,中游為工業(yè)機器人本體制造,下游包括系統(tǒng)集成以及終端應用。
2023-02-27 09:23:59333 在安裝機器人之前,首先要檢查設備是否缺件,用眼睛觀察機器人是否完好無損。然后安裝控制柜,用叉車或吊車吊裝機器人本體。
2023-03-02 10:32:461734 焊接機器人的配置一般包含:機器人控制柜、機器人本體、焊接電源、送絲機、焊絲盤支架、焊槍以及各種連接電纜、傳感器、示教系統(tǒng)、配電柜、保護氣體和焊絲。
2023-03-06 12:47:38837 
焊接機器人多少錢一臺?根據(jù)機器人本體的型號、臂長和焊機型號的不同價格也不盡相同,市面上的焊接機器人價格范圍在3-20萬不等。
2023-03-08 09:17:542563 
弧焊機器人一般由示教盒、控制盤、機器人本體及自動送絲裝置、焊接電源等部分組成;工作原理為示教再現(xiàn);具有焊接質量穩(wěn)定、均一性好,改善工人勞動條件等特點。
2023-03-15 09:34:191757 弧焊機器人系統(tǒng)是由機器人本體、自動送絲裝置、焊接電源、焊槍、變位機和工裝夾具等組成的;主要有氣體保護電弧焊、鎢極氬弧焊和等離子電弧焊三種焊接方法。
2023-03-16 09:50:011962 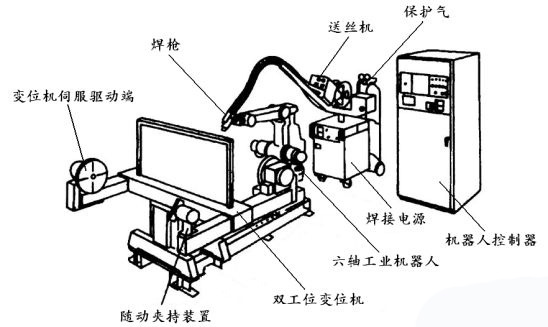
工業(yè)機器人產(chǎn)業(yè)鏈主要是由機器人零部件生產(chǎn)企業(yè)、機器人本體生產(chǎn)企業(yè)、代理商、系統(tǒng)集成商、最終用戶構成。本體是機器人產(chǎn)業(yè)鏈的核心,通常,本體企業(yè)設計本體、編寫軟件,采購通過代理商銷售給系統(tǒng)集成商,系統(tǒng)集成商直接面向終端客戶。有的本體企業(yè)和代理商也會兼做系統(tǒng)集成商。
2023-03-24 09:50:18608 平時不論是新聞上看到的工業(yè)機器人、雙足機器人、四足機器人還是動漫作品里的機器人形象大部分是機器人本體,而機器人控制系統(tǒng)則是幕后功臣,類似于人的大腦,這個控制系統(tǒng)往往安裝在機器人本體的內(nèi)部或是有一個單獨的控制單元。
2023-03-24 10:05:141643 
焊接機器人是從事焊接(包括切割與噴涂)的工業(yè)機器人,它主要包括機器人和焊接設備兩部分。其中,機器人由機器人本體和控制柜(硬件及軟件)組成;而焊接裝備,以弧焊及點焊為例,則由焊接電源(包括其控制系統(tǒng))、送絲機(弧焊)、焊槍(鉗)等部分組成。對于智能機器人,還應配有傳感系統(tǒng),如激光或攝像傳感器及其控制裝置等。
2023-03-24 10:19:10913 焊接機器人多少錢一臺?根據(jù)機器人本體的型號、臂長和焊機型號的不同價格也不盡相同,市面上的焊接機器人價格范圍在3-20萬不等。
2023-04-13 09:31:023349 
在Eye-to-Hand系統(tǒng)中,視覺成像單元安裝在機器人本體外的固定位置,在機器人工作過程中不隨機器人一起運動,當機器人或目標運動到機械臂可操作的范圍時,機械臂在視覺感知信息的反饋控制下,向目標移動,對目標進行精準操控。
2023-06-06 14:44:59894 
從上述影響機器人本體精度的動力學分析發(fā)現(xiàn),關節(jié)柔性也是重要影響因素之一。由于諧波減速器是柔性產(chǎn)品,關節(jié)柔性主要表現(xiàn)為諧波減速器的柔性即減速器的剛性值;諧波減速器的剛性越好,機器人本體精度越高。
2023-07-05 10:08:57535 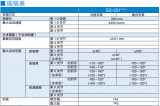
濟南祥控自動化開發(fā)的XKCON祥控軌道智能機器人巡檢系統(tǒng)由主要由行走軌道、機器人本體、無線通訊基站、巡檢設備、現(xiàn)場控制柜及遠程操控平臺組成;機器人本體支持搭載紅外熱成像儀、高清攝像機、激光雷達、溫度傳感器、氣體濃度檢測儀、粉塵濃度檢測儀等感知設備往復行走。
2023-08-04 10:47:28688 
的執(zhí)行相關操作,這就體現(xiàn)出了焊接的自動化和智能化,現(xiàn)在給您介紹一下焊接機器人的傳感器。焊接機器人的傳感器分為內(nèi)傳感器和外傳感器,內(nèi)部傳感器可以監(jiān)測機器人本體的運行情
2023-08-25 08:08:38674 
電源和電氣系統(tǒng):檢查機器人的電源接線、電纜連接、電氣控制柜、電源開關等部分,確保電源供應正常、電氣連接可靠,并檢查電氣系統(tǒng)的絕緣狀況是否符合要求。
2023-09-08 16:33:33202 
精密減速器是工業(yè)機器人的核心部件,占工業(yè)機器人本體成本的30%以上,是影響工業(yè)機器人精確性、穩(wěn)定性等性能指標的重要元件。
2023-11-14 17:48:24744 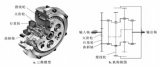
人形機器人是人工智能改造客觀世界的載體,而穩(wěn)定、高效、安全自主的機器人操作系統(tǒng)是鏈接機器人本體和人工智能的理想橋梁。
2023-12-06 10:23:49198 通常涉及將包裝袋袋從生產(chǎn)線抓取并按順序放置在噸包袋內(nèi)。 ?碼垛機器人通常由機器人本體、控制系統(tǒng)、傳感器等部分組成。機器人本體采用高.強度材料制成,具有輕巧、靈活的特點;控制系統(tǒng)則是實現(xiàn)機器人運動控制的主要部件
2023-12-27 15:48:1181 北京人形機器人創(chuàng)新中心近期將發(fā)布第一代通用開放人形機器人本體,這一消息標志著人形機器人領域的一個重要進展。
2024-03-20 14:20:20197
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論