模糊控制系統(tǒng)的核心是模糊控制器,由模糊化、模糊推理、模糊判決(反模糊化)三部分組成,模糊控制工作原理見圖1,其中慮線部分表示模糊控制器;e、ec分別表示實測值與設(shè)定值的偏差及偏差變化率;E,EC
2021-01-24 10:36:00 2932
2932 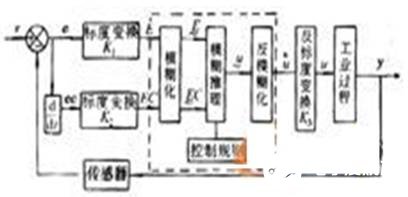
勻速升溫控制是個復雜的過程,具有大慣性、純滯后、非線性等特點,難以得到精確的數(shù)學模型。考慮到這些特點,為提高控制精度,本設(shè)計將Fuzzy PID算法應用于電阻爐溫度控制系統(tǒng),當誤差較大時采用模糊控制
2019-05-30 10:38:57
MATLAB設(shè)計模糊控制器并用simulink仿真
2019-08-12 14:15:54
本帖最后由 eehome 于 2013-1-5 09:59 編輯
【assingle分享】基于LPC2124的溫度模糊控制系統(tǒng)Proteus仿真 + 源代碼
2011-03-31 14:30:19
Matlab模糊控制工具箱為模糊控制器的設(shè)計提供了一種非常便捷的途徑,通過它我們不需要進行復雜的模糊化、模糊推理及反模糊化運算,只需要設(shè)定相應參數(shù),就可以很快得到我們所需要的控制器,而且修改也非常
2021-09-07 07:19:13
本帖最后由 eehome 于 2013-1-5 09:56 編輯
單片機模糊控制系統(tǒng)設(shè)計
2012-08-15 12:47:15
和模糊推理方法。第二章比較精煉地介紹了模糊控制理論基礎(chǔ),重點是模糊控制算法的單片機實現(xiàn)以及模糊控制器的設(shè)計方法。第三章介紹了目前最先進的單片機模糊控制系統(tǒng)的開發(fā)手段。第四章比較清晰地總結(jié)了M68HCO5
2023-09-19 07:07:05
的初始設(shè)定值,由控制系統(tǒng)的特性決定。 建立模糊規(guī)則的原則是使系統(tǒng)輸出響應的動靜態(tài)特性達到最佳:當誤差大或較大時,選擇控制量以盡快消除誤差為主;當誤差較小時,選擇控制變量要以系統(tǒng)的穩(wěn)定性為主,防止系統(tǒng)超調(diào)
2018-09-26 15:48:10
A3000高級過程控制實驗系統(tǒng)中的非線性液位過程作為被控對象,用研華公司生產(chǎn)的ADAM4000 I/O模塊將所設(shè)計的控制器與被控對象連接,構(gòu)成了具有模糊自整定PID參數(shù)的控制系統(tǒng),并將該系統(tǒng)在受到干擾
2019-04-17 09:40:02
具有良好的魯棒性和適應性。模糊控制系統(tǒng)的原理如圖2所示。 2.2 模糊控制器的設(shè)計 模糊控制器首先要根據(jù)輸入輸出變量的數(shù)量確定系統(tǒng)的基本結(jié)構(gòu)和模糊推理類型,然后確定各個變量的取值區(qū)間即論域。其次
2018-11-13 10:53:53
系統(tǒng)的響應時間就會越長。k3為模糊控制器的總增益,選取過小會使系統(tǒng)的動態(tài)響應過程變長,而選擇過大會導致系統(tǒng)震蕩。其他控制量的控制規(guī)則和上述小車驅(qū)動電機速度的控制類似。3.2 信息采集控制系統(tǒng)的軟件設(shè)計
2010-12-21 10:17:23
基于LabVIEW的模糊PID控制系統(tǒng)設(shè)計與實現(xiàn)-雙容水箱設(shè)計的步驟怎么樣的啊,求高手,謝謝,用工具包
2012-05-03 14:08:23
基于TMS320F240的直接轉(zhuǎn)矩模糊控制系統(tǒng)研究介紹基于數(shù)字信號處理器直接轉(zhuǎn)矩模糊控制系統(tǒng),提出一種采用模糊邏輯在線估算定子電阻的方法,可以提高系統(tǒng)的低速性能和響應。通過觀測器對定子磁鏈和速度估計
2009-06-14 00:23:25
誰有基于單片機的汽車模糊控制系統(tǒng)的研究的程序,溫度模糊控制的也行,
2015-03-16 09:55:23
Toolbox)和Simulink設(shè)計仿真工具。所以本文中采用Matlab作為控制系統(tǒng)的控制器部分的設(shè)計仿真工具。 本控制器的SimuLink框圖如圖2.其中輸出電壓標定后作為外環(huán)的反饋量以穩(wěn)定輸出電壓
2018-10-08 15:32:09
模糊PID溫度控制系統(tǒng)的硬件電路包括哪幾部分呢?如何去設(shè)計一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢?
2021-12-23 07:08:20
模糊自適應PID控制原理及結(jié)構(gòu)是什么?如何去設(shè)計恒溫箱溫度控制系統(tǒng)硬件電路?
2021-05-07 07:05:16
PID控制的原理是什么?怎樣去編寫PID控制器和模糊控制器代碼呢?如何對PID控制器和模糊控制器進行仿真呢?
2021-11-19 07:47:47
怎樣去設(shè)計一種模糊PID溫度控制系統(tǒng)的硬件電路呢?模糊PID溫度控制系統(tǒng)的軟件該如何去設(shè)計呢?
2021-11-09 07:37:23
無刷直流電機的模糊PID控制 無刷直流電機的轉(zhuǎn)速控制系統(tǒng)如下圖,圖中有速度環(huán)和電流環(huán)。 然后給出在Simulink中與之相對應的速度電流雙閉環(huán)調(diào)速系統(tǒng)結(jié)構(gòu)圖圖中WASR和WACR分別為速度控制器
2016-02-01 10:25:56
氣動柔性球關(guān)節(jié)的模糊PID控制介紹了新型氣動柔性球關(guān)節(jié),討論研究其控制方法。綜合模糊控制和PID 控制的特點,設(shè)計針對氣動柔性球關(guān)節(jié)的模糊PID 控制器,實現(xiàn)對球關(guān)節(jié)彎曲角度、偏轉(zhuǎn)方向等系統(tǒng)參數(shù)
2009-08-08 09:34:49
的比例,積分和微分(PID)模糊控制系統(tǒng),采用camera-link接口的高幀頻CMOS相機和大規(guī)模FP-GA芯片設(shè)計了精跟蹤處理控制平臺,并將圖像處理、前饋補償和PID模糊控制等功能全部集成在FPGA
2010-04-23 11:31:12
如何去設(shè)計模糊PID自整定控制器?關(guān)于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特點?
2021-04-21 06:08:28
模糊PID控制方式與傳統(tǒng)PID控制相比有何優(yōu)勢?怎樣去搭建一種模糊控制器系統(tǒng)的數(shù)學模型?如何對模糊控制器系統(tǒng)的數(shù)學模型進行仿真?
2021-08-18 07:35:38
建好的模糊控制器怎么在simulink中用啊,求大神解答
2015-03-09 14:45:58
for G Toolkit)的使用方法,并利用它設(shè)計出模糊控制器。結(jié)合LabVIEW開發(fā)平臺,設(shè)計出灰水pH模糊控制系統(tǒng),實現(xiàn)了對灰水pH的有效控制。 關(guān)鍵詞:模糊控制;LabVIEW;模糊邏輯
2019-05-09 09:40:12
基于Matlab的模糊邏輯工具箱的模糊控制系統(tǒng)仿真
2008-06-19 14:56:15 64
64 模糊系統(tǒng)與模糊控制教程共31章,內(nèi)容包括模糊數(shù)學與模糊邏輯中一些對于模糊系統(tǒng)理論有用的概念和原理,模糊系統(tǒng)的各組成部分,設(shè)計模糊系統(tǒng)的四種方法,模糊控制與非自適
2009-01-14 22:40:480 本文將模糊控制和免疫反饋機理與傳統(tǒng)的PID 控制相結(jié)合,設(shè)計了一種模糊免疫PID 控制器并將它應用在新型變壓器卷鐵芯成型卷繞糾偏控制系統(tǒng)中。仿真研究表明,該控制器具有使系
2009-06-04 10:01:0113 該文提出調(diào)整系統(tǒng)控制量的模糊 PID 控制器的計算機設(shè)計與仿真。以堿回收爐的水位控制為例具體論述調(diào)整系統(tǒng)控制量的模糊PID 控制器的設(shè)計、2-D 控制表的建立、以及控制器計算
2009-06-09 16:41:5220 本文運用模糊控制與PID 控制分別對同一受控對象進行控制。通過MATLAB 仿真,表明了模糊控制與傳統(tǒng)的PID控制相比明顯地改善了控制系統(tǒng)的動態(tài)性能。關(guān)鍵詞:模糊控制,PID 控制
2009-06-11 08:54:4736 模糊控制的設(shè)計核心是模糊控制器的設(shè)計。為了獲得一般模糊控制器的設(shè)計,闡明了模糊控制的原理、模糊控制的特點和重要應用。采用兩個模糊輸入量、一個模糊輸出量的模糊控
2009-06-16 09:53:1318 本文對中央空調(diào)系統(tǒng)的模糊控制器的設(shè)計做了比較詳盡的論述,并結(jié)合MATLAB 仿真軟件對控制系統(tǒng)做了仿真,得到其響應曲線,并與PID 控制方法進行比較,從而得出模糊控制器在中央空
2009-06-22 09:53:2139 設(shè)計了一種電機調(diào)速系統(tǒng)在復合模糊控制器,采用計算機、A/D、的、D/A和傳感器構(gòu)成實時數(shù)據(jù)采集和控制系統(tǒng)。討論了復合模糊控制器的實現(xiàn)和組成、控制策和現(xiàn)實算法。實際應用
2009-06-26 11:12:5324 本文首先介紹了一種專門用于模糊控制系統(tǒng)設(shè)計的WinFACT 軟件系統(tǒng)。詳細 地介紹了利用WinFACT 進行自適應模糊控制系統(tǒng)設(shè)計的基本原理以及自適應模糊控制器的軟件程序設(shè)計方法。最
2009-06-29 09:34:188 火電廠主汽溫具有大慣性、大遲延和時變特性等特性,采用常規(guī)的PID 串級控制難以獲得滿意的控制效果。為此,提出一種基于模糊自整定PID 控制器的串級控制系統(tǒng),該系統(tǒng)將模
2009-07-08 09:26:1419 研究了應用粗糙集理論上、下近似定義對模糊控制規(guī)則進行拓展設(shè)計粗糙模糊控制器的方法,完成了水箱水位粗糙模糊控制器的設(shè)計,并分別進行了模糊控制和粗糙模糊控制仿真研
2009-08-10 08:27:0610 文章應用德國SIEMENS S7-300 可編程序控制器設(shè)計一個兩維模糊控制器,將控制器的模糊輸出反模糊化后化為實際輸出而控制調(diào)節(jié)閥的開度,使中位水箱的液位達到給定值。通過在組態(tài)
2009-08-14 15:00:2133 針對溫度控制系統(tǒng)的大慣性、大時延等特性,根據(jù)模糊控制理論,設(shè)計出一種模糊自整定PID 控制器,并應用于BGA 返修站溫度控制系統(tǒng),實現(xiàn)了PID 參數(shù)的在線自整定。仿真實驗表
2009-08-15 10:35:0625 對常規(guī)的模糊控制器的設(shè)計進行了分析研究。以提高系統(tǒng)精度為目的,簡單實用為原則,設(shè)計了模糊PID 控制器。仿真結(jié)果表明,所設(shè)計的模糊PID 控制器大大提高了系統(tǒng)的控制精
2009-08-19 11:33:1020 結(jié)合重鋼軋鋼廠加熱爐溫度控制系統(tǒng),以改善加熱爐控制效果,該系統(tǒng)采用了一種基于模糊控制的PLC 溫度控制系統(tǒng)。該系統(tǒng)充分應用模糊控制器的智能特點,以及PLC的編程維護方
2009-08-31 09:50:1536 針對溫度控制系統(tǒng)非線性、大滯后、時變性等特征和對溫度控制的要求,采用了自適應模糊PID 控制器來實現(xiàn)溫度控制,給出了C8051F020 Soc 單片機控制
2009-09-08 08:50:2339 本文研究并分析了TSC 的基本原理及其九區(qū)圖控制法,指出九區(qū)圖控制法的缺陷。結(jié)合無功控制的實踐經(jīng)驗,研究了基于模糊控制的TSC 型動態(tài)無功補償控制器。該模糊控制器采用
2010-02-21 10:15:5317 模糊PID在電阻爐溫度控制系統(tǒng)中的應用
針對電阻爐的特點,提出Fuzzy-PID控制算法,介紹了模糊PID控制器原理,并改進了Fuzzy-PID控制器算法。仿真實驗表明該控制
2010-04-28 15:57:1668 針對溫度控制系統(tǒng)非線性、大滯后、時變性等特征和對溫度控制的要求,采用了自適應模糊PID控制器來實現(xiàn)溫度控制,給出了C8051F020 Soc單片機控制實現(xiàn)的具體方案。仿真和實驗結(jié)果
2010-07-14 14:58:1572 介紹了用MATLAB模糊邏輯工具箱設(shè)計模糊控制器! 并用SIMULANK進行仿真的一般方法" 該方法具有簡便# 直觀# 高效的特點" 最后給出仿真結(jié)果"
2010-07-19 17:03:2645 倒立擺系統(tǒng)是多變量、非線性、強耦合的控制系統(tǒng)。采用模糊控制理論研究二級倒立擺控制問題。運用最優(yōu)控制方法設(shè)計融合函數(shù)以降低模糊控制器的維數(shù),減少模糊控制規(guī)則數(shù),
2010-12-29 17:29:0846 參數(shù)自適應模糊PID控制器的設(shè)計
溫度控制系統(tǒng)中,采用了非線性的隸屬度函數(shù),以模糊控制為粗調(diào)、PID為細調(diào)。在模糊控制的基礎(chǔ)上,由PI
2009-02-27 09:29:312223 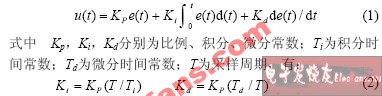
基于單片機的模糊控制系統(tǒng)
1 引言 模糊控制(Fuzzy Control)是目前自動控制研究中活躍而富有成果的領(lǐng)域之一,模糊理論是當前能用來對信息進行軟處
2009-12-28 17:26:553191 
為了提高系統(tǒng)的控制性能,綜合了模糊控制和PID控制的優(yōu)點,提出一種基于模糊-PI雙模控制器設(shè)計方法。典型的二維模糊控制器因缺少積分環(huán)節(jié),難以消除穩(wěn)態(tài)誤差,控制的精度常常不能滿足系統(tǒng)要求;而PI控制器具有良好的消除穩(wěn)態(tài)誤差的作用,
2011-02-12 15:24:4637 本文在分析常規(guī)PID控制和模糊控制算法的基礎(chǔ)上,設(shè)計了帶有自調(diào)整因子的雙模糊控制器。根據(jù)設(shè)定值與輸出值間的偏差及偏差的變化,切換模糊控制器1和模糊控制器2,完成兩組控制器
2011-07-12 11:38:442666 
針對溫度控制系統(tǒng)的時變、滯后等非線性特性及控制比較復雜的問題,提出了一種模糊控制方案以改善系統(tǒng)的控制性能. 該方案采用mamdani推理型模糊控制器代替?zhèn)鹘y(tǒng)的PID控制器,依據(jù)模糊
2011-09-13 10:59:32131 針對溫度控制系統(tǒng)的時變、滯后等非線性特性及控制比較復雜的問題提出了一種模糊控制方案以改善系統(tǒng)的控制性能. 該方案采用mamdani推理型模糊控制器代替?zhèn)鹘y(tǒng)的PID控制器依據(jù)模糊
2011-09-14 15:30:2656 針對拉拔機在拉拔的過程中因負載大小不同而引起不穩(wěn)定和抖動的現(xiàn)象,設(shè)計了模糊PID控制器。模糊PID以系統(tǒng)偏差和偏差變化率作為輸入,通過修改 PID 控制器的參數(shù)來獲得滿意的動態(tài)
2011-12-05 14:47:0033 針對多路口交通控制的特征及實際交通狀況,對已有模糊控制算法進行了改進,在單路口模糊控制研究的基礎(chǔ)上,研究了基于相序優(yōu)化模糊控制的城市區(qū)域交通信號控制系統(tǒng)。此方法不
2012-02-16 16:41:2543 針對目前鍋爐蒸汽壓力控制存在安全性低、穩(wěn)定性差等缺點,本文將模糊控制應用于常見蒸汽壓力控制系統(tǒng)中,并溶入成熟的 PID控制策略,給出了模糊控制器的設(shè)計方法,通過實際使用
2012-11-23 11:56:2352 在介紹模糊控制基本原理及模糊控制器設(shè)計與分類的基礎(chǔ)上,推導出一種簡化PID型模糊控制器。為了驗證簡化PID型模糊控制器的性能,將其與PD及 PI型模糊控制器進行比較。其仿真結(jié)果最
2013-02-21 15:56:0054 在FPGA平臺上實現(xiàn)了一種溫度模糊控制器,首先對模糊控制系統(tǒng)的思想和工作原理進行了分析,然后使用Quartus ii和modelsim對整個系統(tǒng)進行設(shè)計和仿真,最后在FPGA中實現(xiàn)。結(jié)果表明,該模
2013-03-15 17:06:52104 針對電液比例位置控制系統(tǒng)由于非線性和死區(qū)特性在實際控制中難以得到滿意的控制效果的現(xiàn)狀,本研究采用T-S模糊控制理論的原理設(shè)計了T-S模糊控制器對電液比例位置控制系統(tǒng)進行控
2013-05-16 17:03:2617 介紹了網(wǎng)絡(luò)控制系統(tǒng)的基本概念,利用Matlab建立了一個網(wǎng)絡(luò)控制系統(tǒng)仿真平臺,實現(xiàn)了對網(wǎng)絡(luò)控制系統(tǒng)的實時仿真,并重點對控制器的算法進行了研究,給出了模糊PID控制器與PID控制器
2013-09-25 11:26:0445 /Simulink仿真平臺上對電壓控制系統(tǒng)進行仿真。仿真結(jié)果表明,加入了模糊PI控制的系統(tǒng)具有更好的動態(tài)響應特性和穩(wěn)態(tài)特性。自整定PI模糊控制器具有控制精度高,超調(diào)小,動態(tài)性能好的特點。
2015-12-24 18:33:4817 自動焊接模糊控制系統(tǒng)研究-2005,下來看看。
2016-04-01 15:02:197 關(guān)磁阻電機模糊PID控制系統(tǒng)研究,下來看看。
2016-04-01 15:56:0812 基于FPGA的開關(guān)磁阻電機無位置傳感器與模糊PID控制系統(tǒng)的研究-2009。
2016-04-05 10:36:2727 基于DSP的無刷直流電機模糊控制系統(tǒng)設(shè)計和仿真研究-2009。
2016-04-05 10:53:3318 基于模糊PID的風電系統(tǒng)轉(zhuǎn)速控制仿真研究-2011。
2016-04-05 11:36:0818 基于模糊PID控制的同步發(fā)電機勵磁控制系統(tǒng)仿真研究-2007。
2016-04-05 16:39:0623 模糊自適應控制器的設(shè)計及其仿真-2008。
2016-04-06 11:09:1815 模糊控制系統(tǒng)設(shè)計與實例,有需要的下來看看。
2016-04-11 17:00:410 PID控制器的模糊增益調(diào)整及在電阻爐溫控制系統(tǒng)中的應用
2016-06-06 10:00:4612 研究了一種誤差驅(qū)動型自適應模糊PID 控制器在二階時滯系統(tǒng)中的應用。選擇系統(tǒng)的穩(wěn)態(tài)誤差和誤差變化率為PID 參數(shù)自適應模糊調(diào)整的前件變量, 將前件變量模糊化為7 個論域期間, 建立了PID 參數(shù)調(diào)整
2016-07-19 16:55:220 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 一種基于模糊控制的溫度控制系統(tǒng)設(shè)計_黎惠成
2017-01-12 22:26:564 模糊PID在硫熏強度串級比值控制系統(tǒng)中的應用_司亞楠
2017-01-12 19:56:230 模糊PID在恒壓供水控制系統(tǒng)中的應用_齊繼陽
2017-01-18 20:35:090 基于PAC的模糊控制器的研究_劉尚爭
2017-01-19 21:54:240 基于MATLAB的模糊邏輯控制系統(tǒng)的設(shè)計與仿真_劉永
2017-02-07 18:37:162 基于Matlab的模糊控制系統(tǒng)的設(shè)計與仿真_邵桂榮
2017-01-31 21:14:564 模糊自適應PID控制的研究及應用仿真_張涇周
2017-01-31 21:14:564 基于模糊PID的PMSM矢量控制系統(tǒng)研究_張濤
2017-03-16 08:00:001 本文提出了一種兩相伺服電動機模糊-PI雙模速度控制系統(tǒng)的設(shè)計。其主要思想在輸入信號之后,設(shè)置了一個帶閾值E模態(tài)轉(zhuǎn)換器,根據(jù)閾值E與電動機轉(zhuǎn)速誤差e的比較結(jié)果確定其模態(tài):當電動機轉(zhuǎn)速誤差e大于閾值
2017-11-05 15:31:5118 控制系統(tǒng)的實時性,設(shè)計了一種基于分層模糊系統(tǒng)的間接自適應控制器;同時為了減少模糊系統(tǒng)逼近誤差、參數(shù)不確定性和系統(tǒng)外部干擾對控制系統(tǒng)穩(wěn)定性造成的影響,引入魯棒補償項,提高控制器的H_性能,并利用Lyapunov理論分析證明
2018-01-02 18:30:150 針對茶葉在機制理條過程中出現(xiàn)色澤變黃、變暗或產(chǎn)生焦味等問題,通過對茶葉理條T藝、溫度控制、模糊算法和模糊PID控制等方面進行研究,將模糊算法與模糊PID控制技術(shù)應用到茶葉理條機控制系統(tǒng)之巾,提出
2018-02-28 10:07:401 模糊控制器的設(shè)計參數(shù)主要有:各輸入、輸出變量模糊子集的隸屬度函數(shù),模糊控制規(guī)則,輸入輸出變量的比例變換因子等。要依據(jù)設(shè)計者的經(jīng)驗和反復調(diào)試才能設(shè)計出一個比較好的模糊控制器。預先采用計算機仿真方法
2018-03-28 15:42:0535 將一種基于模糊推理的參數(shù)自整定PI控制器引入到永磁同步電動機(PMSM)矢量控制系統(tǒng)中,該控制器可以根據(jù)控制量給定值和反饋值的偏差E和偏差變化率EC按照模糊控制規(guī)則實時自整定PI控制器的兩個參數(shù)。仿真結(jié)果表明,運用該控制方法的系統(tǒng)響應快、超調(diào)小、魯棒性好,較常規(guī)PI控制具有更好的動靜態(tài)性能。
2018-06-01 11:40:0311 為了研究網(wǎng)絡(luò)控制系統(tǒng)的特性,結(jié)合PID結(jié)構(gòu)簡單、穩(wěn)定性好和模糊控制適應性強的特點,設(shè)計了模糊PID網(wǎng)絡(luò)控制系統(tǒng)。綜合分析了采樣周期、時延、數(shù)據(jù)丟包率、網(wǎng)絡(luò)傳輸速率、通信模式和擾動等主要因素對系統(tǒng)
2018-12-27 08:00:005 。仿真結(jié)果表明,該控制器可設(shè)計成為一個響應速度快、靜差小的控制系統(tǒng),與經(jīng)典 PID 控制器在同樣的系統(tǒng)中比較,自適應模糊自抗擾控制有較好的控制性能。
2019-06-25 08:00:002 針對在復雜系統(tǒng)中實現(xiàn)自組織參數(shù)的PID控制問題,介紹了一種基于模糊控制原理的PID參數(shù)自組織控制器的設(shè)計方案, 同時利用MATLAB中的SIMULINK和FUZZY工具箱進行了仿真研究,仿真結(jié)果表明,參數(shù)自組織模糊控制系統(tǒng)比參數(shù)固定的系統(tǒng)的控制效果好。
2019-09-20 17:08:1916 針對常規(guī)PID控制器參數(shù)整定不良、適應性差、控制精度不理想的現(xiàn)狀,提出了動態(tài)過程中參數(shù)自動整定的模糊PID 控制系統(tǒng)。并利用MATLAB 的SUML IN K工具箱,對系統(tǒng)進行仿真,仿真試驗結(jié)果表明模糊PID 控制魯棒性好、控制精度提高。
2019-10-24 17:14:128 仿真中模糊自整定控制器中KP,KI,KD三個待整定參數(shù)的初始值均為零。為使輸入信號與模糊自整定控制器的論域相同,引入了幅度為3的限幅器。當給定轉(zhuǎn)速均設(shè)定為n=1 000 rad/s時,分別對上述兩系統(tǒng)進行仿真,結(jié)果如圖6所示。
2020-04-06 10:44:005437 
模糊控制器是一種基于模糊邏輯的控制器,通過將輸入變量和輸出變量都表示為模糊量,并運用模糊推理來實現(xiàn)針對復雜系統(tǒng)的控制。與傳統(tǒng)的控制器相比,模糊控制器更加適合那些難以建模或者模型不精確的系統(tǒng)。
2023-03-17 18:12:182549
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論