 電子發燒友App
電子發燒友App


本文主要介紹SMBus總線。 ? SMBus(System Management Bus)是Intel與Duracell(金頂電池)共同制定的接口,首版于1995年發表,參考I2C接口。
SMBus是一種二線制串行總線(還有兩根可選信號線SMBSUS#(系統低功耗掛起狀態指示)、SMBALERT#(事件提醒)),它大部分基于I2C總線規范。和I2C一樣,SMBus可以不增加額外引腳,創建該總線主要是為了增加新的功能特性,支持低功耗和高功耗兩種模式,其總線速率支持100kHz、400kHz、1MHz。它工作在主/從模式:主器件提供時鐘,在其發起一次傳輸時提供一個起始位,在其終止一次傳輸時提供一個停止位;從器件擁有一個唯一的7位或10位從器件地址。
SMBus和I2C的主要區別如下(主要區別詳見SMBus Specification Appendix B):
總線電源VDD:I2C沒定義,SMBus為1.8~5V。
閾值電壓VIL、VIH、VHYS、VOL、IOL、ILEAK_BUS不同;
最小總線速率(Bus Speed):I2C沒有最低總線速率要求,SMBus要求最低總線速率不能低于10kHz;
SMBus一定要維持10kHz以上的運作頻率,主要是為了管理監控,只要在保持一定傳速運作的情況下加入參數,就可輕松獲知總線目前是否處于閑置(Idle)中,省去逐一偵測傳輸過程中的停斷(STOP)信號,或持續保有停斷偵測并輔以額外參數偵測,如此對總線閑置后的再取用會更有效快速。
最大時鐘拉伸(ClockStretching):tTIMEOUT、tHIGH、tLOW:SEXT、tLOW:MEXT、tOF、tF、tPOR;
設備地址應答:I2C不要求設備一定要能應答自身地址,而SMBus要求每次收到自身地址后都要有應答;
I2C并沒有強制規定發送端在發送接收端地址后接收端非要做出響應不可,也可以默不作聲,即便默不作聲,發送端還是會繼續工作,開始進行數據傳輸及讀/寫指令;
SMBus是不允許接收端在接收到自身地址信息后卻不發出ACK回應。因為SMBus上所連接的受控裝置有時是動態加入、動態移除的,例如換裝一顆新電池,或筆記本電腦接上DOCK PORT等,如果接入的裝置已經改變卻沒有回應,則發送端的程序所掌握的并非是整體系統的最新組態,就會造成誤動作。
以上是一些簡單的區別,下面從兩種總線的應用背景、版本演進、電氣特性差異、時序差別、已妥與未妥機制的強制性差別、傳輸協議的子集和超集等方面進行詳細的對比。
應用背景、版本演變
首先從規格的制訂背景開始,I2C是在設計電視應用時所研發的接口,首版于1992年發表;而SMBus(System Management Bus)則是Intel與Duracell(金頂電池)共同制訂筆記本電腦所用的智能型電池(SmartBattery)時所研發的接口,首版于1995年發表,不過SMBus文件中也提及,SMBus確實是參考自I2C,并以I2C為基礎所衍生成。
I2C起源于電視設計,但之后朝通用路線發展,各種電子設計都有機會用到I2C;而SMBus則在之后為PC所制定的先進組態與電源管理接口(Advanced Configuration & Power Interface;ACPI)規范中成為基礎的管理訊息傳遞接口、控制傳遞接口。
雖然I2C與SMBus先后制訂時間不同,但都在2000年左右進入成熟化改版,I2C的過程改版以加速為主要訴求,而SMBus以更切合Smart Battery及ACPI的需求為多。
I2C三次主要改版:
1992年V1.0
1998年V2.0
2000年V2.1
SMBus三次主要改版:
1995年V1.0
1998年V1.1
2000年V2.0
電氣特性差異
I2C的Hi/Lo邏輯電平有兩種認定法:相對認定與絕對認定,相對認定是依據Vdd的電壓來決定,Hi為0.7Vdd,Lo為0.3Vdd,絕對認定則與TTL準位認定相同,直接指定Hi/Li電壓,Hi為3.0V,Lo為1.5V。相對的SMBus只有絕對認定,且電平與I2C有異,Hi為2.1V,Lo為0.8V,與I2C不全然吻合但也算部分交集。
不過,SMBus后來也增定一套更低電壓的電平標準,Hi為1.4V,Lo為0.6V,這是為了讓運用SMBus的裝置能更省成本的做法。
了解電壓后再來看電流,由于SMBus一開始就是運用在筆記本電腦內,所以省電的表現優于I2C,只需100uA就能維持工作,I2C卻要到3mA同樣的低用電特性也反應在漏電流(Leakage Current)的要求上,I2C最大的漏電流為10uA,SMBus為1uA,但是1uA似乎過度嚴苛,使運用SMBus的裝置在驗證測試時耗費過多的成本與心力,因此之后的SMBus V1.1版放寬了漏電流上限,最高可至5uA。
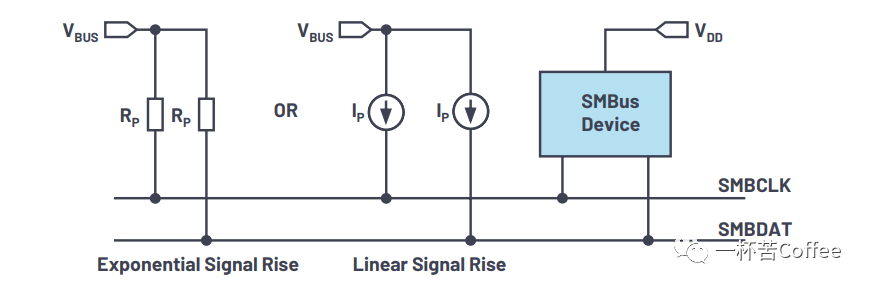
再者是相關限制,I2C有線路電容的限制,SMBus卻沒有,但也有相類似的配套規范,即是電平下拉時的電流限制,當SMBus的集電極開路Pin導通而使線路接地時,流經接地的電流不能高于350uA,另上電流(即相同的集電極開路Pin開路時)也一樣有規范,最小不低于100uA,最高也是不破350uA的。
既然對電流有限制,那么也可容易地推斷對上拉電阻的阻值之范圍要求,I2C在5V Vdd時當大于1.6kohm,在3V Vdd時當大于1kohm,類似的SMBus于5V Vdd時當大于14kohm,3V Vdd時當大于8.5kohm,不過這個定義并非牢不可破,就一般實務而言,在SMBus上也可用2.4k~3.9kohm范疇的阻值。
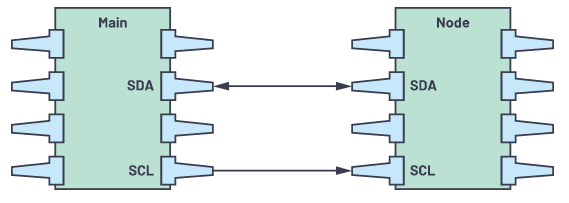
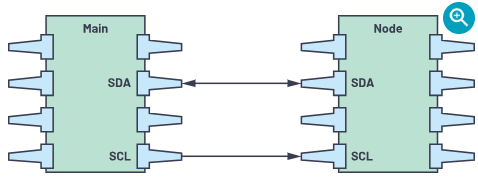
附注:I2C的時鐘線稱SCK或SCL,數據線稱SDA。SMBus的時鐘線稱SMBCLK,數據線稱SMBDAT。
I2C與SMBus在邏輯電平的電壓定義不盡相同,基本上I2C的定義較為寬裕、彈性,而SMBus則更專注在省電方面的要求。
? 時序差別與考驗
物理層面的空間要求完后,再來就是物理層面的時間,即是時序(Timing)方面的差別。
先以運作頻率來說,I2C此方面相當寬裕,最低頻可至0Hz(直流狀態,等于時間暫停),高可至100kHz(Standard Mode)、400kHz(Fast Mode)、乃至3.4MHz(High Speed Mode),相對的SMBus就很局限,最慢不慢于10kHz,最快不快于100kHz。很明顯的,I2C與SMBus的交集運作頻率即是10kHz?100kHz間。
用于筆記本電腦的電池管理或PC組態管理、用電管理的SMBus,很容易體會不需要更高運作頻率的理由,只要傳遞小數據量的監督信息、控制指令本就不用過于高速,而朝向廣泛運用的I2C自然希望用更高的傳輸以應對各種可能的需求。然而大家可能會疑惑,為何SMBus有最低速的要求?何不放寬到與I2C相同的無最低速限制呢?
SMBus一定要維持10kHz以上的運作頻率,主要也是為了管理監控,另一個用意是只要在保持一定傳速運作的情況下加入參數,就可輕松獲知總線目前是否處于閑置(Idle)中,省去逐一偵測傳輸過程中的停斷(STOP)信號,或持續保有停斷偵測并輔以額外參數偵測,如此對總線閑置后的再取用會更有效快速。
傳速要求之后還有數據保持時間(Data Hold Time)的要求,SMBus規定SMBCLK線路的電平下降后,SMBDAT上的數據必須持續保留300nS,但I2C 卻沒有對此有相同的強制要求。
類似的,SMBus對接口被重置(Reset)后的恢復時間(Timeout)也有要求,一般而言是35mS,I2C這方面亦無約束,可以任意延長時間。相同的SMBus也要求無論是在主控端(Master)或受控端(Slave),其頻率處于Lo電平時的最長持續時間不得超越限制,以免因為長時間處在Lo準位,而致收發兩端時序脫軌(失去同步,造成后續誤動作)。
還有,I2C與SMBus在信號的上升時間、下降時間等也有不同的細節要求,此點必要時也必須進行確認,或在驗證過程中稍加留意。
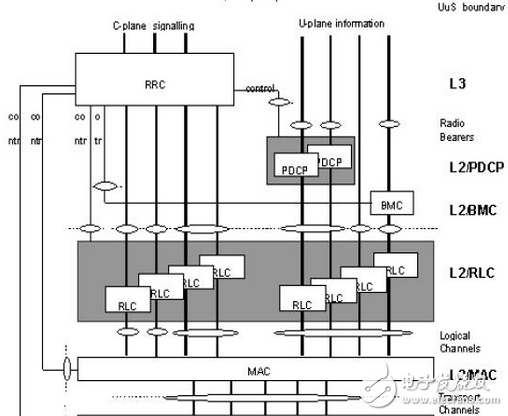
Smart Battery或ACPI的實現、監督、與操控,最底層都需要SMBus(圈處)作為后援,圖為簡易的多組式智能型電池系統,圖中有Smart Battery A、B兩組電池。
? 已妥和未妥機制的強制性差別
不單是電氣、時序有別,更深層次的協議機制也有不同。在I2C中,主控端發送端(主控端)要與接收端(受控端)通訊前,會在總線上廣播受控端的地址信息,每個接收端都會接收到地址信息,但只有與該地址信息相切合的接收端會在地址信息發布完后發出「已妥」的回應(Acknowledge;ACK),讓發送端知道對應的接收端確實已經備妥,可以進行通訊。
但是,I2C并沒有強制規定接收端非要做出響應不可,也可以默不作聲,即便默不作聲,發送端還是會繼續工作,開始進行數據傳遞及下達讀/寫指令,如此的機制在一般運用中還是可行,但若是在一些實時(Real Time)性的應用上,任何的動作與機制都有一定的時限要求,這種可有可無式的響應法就會產生問題,可能會導致受控端無法接收信息。
相同的情形,在SMBus上是不允許接收端在接收地址信息后卻不發出回應,每次都要回應,為何要強制回應?其實與SMBus的應用息息相關,SMBus上所連接的受控裝置有時是動態加入、動態移除的,例如換裝一顆新電池,或筆記本電腦接上DOCK PORT等,如果接入的裝置已經改變卻沒有回應,則主控端的程序所掌握的并非是整體系統的最新組態,就會造成誤動作。
類似的情形也適用于ACPI,PC機內機外經常有一些裝置可動態插入、移除,如機內風扇、外接打印機等,這些也一樣該強制對主控端群發(廣播)的地址信息作出完整響應。
地址動作方面有異,數據傳輸方面也有異。在I2C方面,Slave雖然對Master所發出的地址作出響應,但在后續的數據傳遞中,可能因某些事務必須先行處理、因應而無法持續原有的傳輸,這時候Slave就要對Master發出「未妥」的回應(Not Acknowledge;NACK),向Master表示Slave正為他務忙碌中。
而SMBus方面,與I2C相同的,會以NACK的回訊向Master表達Slave尚未收妥傳遞的信息,但是SMBus的Slave會在后續的每個Byte傳輸中都發出NACK回信,這樣設計的原因是因為SMBus沒有其他可向Master要求重發(Resend)的表示法。更直接說就是:NACK機制是SMBus標準中的強制必備,任何的訊息傳遞都很重要,不允許有漏失。
I2C在完成一段地址或數據信息的傳輸后,接收端可發出收妥(ACK)、未妥(NACK)的響應,SMBus也具相同的機制,但由于應用之故有更強制的回顯請求。
? 傳輸協議的子集和超集
互動知會機制上有強制與否的差別,協議方面也是。SMBus的通訊協議與協議中所用的訊息格式,其實只是取自I2C規范中,對于數據傳輸格式定義中的子集合(Subset)而已。所以,如果將I2C與SMBus交混連接,則I2C裝置在存取SMBus裝置時,只能使用SMBus范疇的協議與格式,若使用I2C的標準存取方式反而無法正確存取。
另外,I2C規范中有一種稱為’General Call’的廣呼方式,當發出’0000000’的地址信息后,所有I2C上的Slave裝置統統要對此作出反應,此機制適合用在Master要對所有的Slave進行廣播性訊息更新與溝通上,是一種總體、批次的運作方式。
SMBus一樣有General Call機制,但在此之外SMBus還多了一種特有的ALERT機制,不過這必須于頻率線與數據線外再追加一條線(稱為:SMBSUS)才能實現,ALERT雖名為警告但其實是中斷(Interrupt)的用意,Slave可以將SMBSUS線路的電位拉低(ALERT#,#表示低電平有效),這時就等于向Master發出一個中斷警訊,要求Master盡速為某一Slave提供傳輸服務。
Master要響應這個服務要求,是透過I2C/SMBus的頻率線與數據線來通訊,但要如何知道此次的通訊只是Master對Slave的一般性通訊?還是特別針對Slave的中斷需求而有的服務響應?
這主要是透過Master發出的地址信息來區別,若為回應中斷的服務,地址信息必然是’0001100’,當Slave接收到’0001100’的地址信息,就知道這是Master特為中斷而提供的服務通訊。
因此,軟件工程師須留心,規劃時必須讓所有的Slave都不能占用’0001100’這個地址,以供ALERT機制運用(當然!若現在與未來都不會用上ALERT機制則可盡管占用)。事實上各種進階的規范標準(如SmartBattery、ACCESS.bus、VESA DDC等)都在I2C的短尋址中訂立了一些為自用而保留的地址,這在最初設計與定義時就該有所留意,以免因先行占用而導致日后須改寫軟件的麻煩。
補充提醒的是,SMBSUS一樣是開集電極外加上拉電阻的線路,所以有一個Slave將電位拉下后,其余Slave偵測到電位被拉下,表示已有Slave正在與Master進行中斷需索與響應服務,須等待搶到中斷服務權的Slave確實被服務完畢,重新將SMBSUS釋放回高電平后,才能持續以「看誰能先將線路電平拉低?」的方式來爭取中斷服務。
?
???
審核編輯:劉清












 工商網監
工商網監
評論