 電子發(fā)燒友App
電子發(fā)燒友App


01CAN總線的起源
1.1 CAN總線的由來(lái)
CAN是Controller Area Network的縮寫(以下簡(jiǎn)稱CAN)。是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。
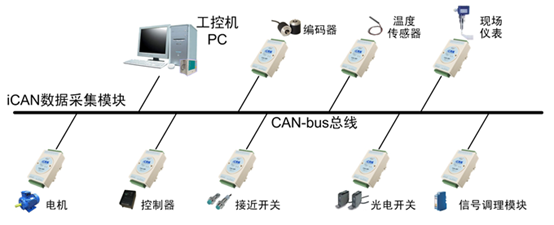
在當(dāng)前的汽車產(chǎn)業(yè)中,出于對(duì)安全性,舒適性,方便性,低公害,低成本的要求,各種各樣的電子控制系統(tǒng)被開(kāi)發(fā)出來(lái)。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類型及對(duì)可靠性的要求不盡相同,由多條總線構(gòu)成的情況很多,線束的數(shù)量也隨之快速增加。為適應(yīng)“減少線束數(shù)量”,“通過(guò)多個(gè)LAN,進(jìn)行大量數(shù)據(jù)的高速通信”的需要,1986年德國(guó)電氣商BOSCH開(kāi)發(fā)出面向汽車的CAN通信協(xié)議。
此后,CAN通過(guò)ISO11898及ISO11519進(jìn)行了標(biāo)準(zhǔn)化,現(xiàn)在在歐洲已是汽車網(wǎng)絡(luò)的標(biāo)準(zhǔn)協(xié)議。
1.2 CAN總線的歷史
1983年,BOSCH開(kāi)始研究車上網(wǎng)絡(luò)技術(shù)
1986年,BOSCH在SAE大會(huì)公布CAN協(xié)議
1987年,Intel和Philips先后推出CAN控制器芯片
1991年,BOSCH頒布CAN2.0技術(shù)規(guī)范,CAN2.0包括A和B兩個(gè)部分
1991年,CAN總線最先在Benz S系列轎車上實(shí)現(xiàn)
1993年,ISO頒布CAN國(guó)際標(biāo)準(zhǔn)ISO11898
1994年,SAE頒布基于CAN的J1939標(biāo)準(zhǔn)
2003年,Maybach發(fā)布了帶76個(gè)ECU的新車型(CAN LIN MOST)
2003年,VW發(fā)布帶35個(gè)ECU的新型Golf
目前,CAN總線已經(jīng)被廣泛的應(yīng)用于汽車上,且未來(lái)很長(zhǎng)一段時(shí)間,CAN總線仍會(huì)繼續(xù)在車上繼續(xù)使用。
1.3?主要的車載網(wǎng)絡(luò)協(xié)議
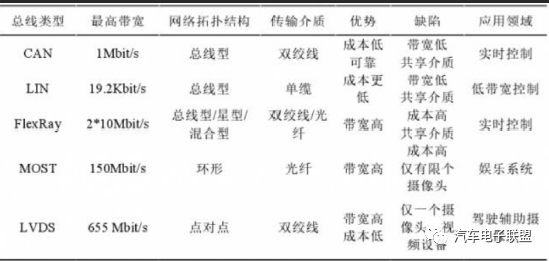
圖1 常見(jiàn)車載總線特點(diǎn)對(duì)比
MOST總線作為一種新型的總線形式,面向媒體的系統(tǒng)傳輸 總線,MOST 是汽車業(yè)合作的成果,而不具備正式的標(biāo)準(zhǔn),因而目前量產(chǎn)車型中很少見(jiàn)。
LVDS總線在當(dāng)前的輔助駕駛系統(tǒng)中較為常見(jiàn),是輔助駕駛系統(tǒng)中攝像頭采集數(shù)據(jù)的主要傳輸形式,后續(xù)若同學(xué)們感興趣,會(huì)單獨(dú)出一篇LVDS的介紹文章與大家分享,感興趣的同學(xué)可以關(guān)注本賬號(hào),留言回復(fù)。
2CAN總線的標(biāo)準(zhǔn)
2.1 CAN2.0版本
2.0A—將29位ID視為錯(cuò)誤
2.0B被動(dòng)—忽略29位ID的報(bào)文
2.0B主動(dòng)—可處理11位和29位兩種ID的報(bào)文,相對(duì)于2.0A增加了拓展幀的數(shù)據(jù)定義。
?
| ? | 11位ID的數(shù)據(jù)幀 | 29位ID的數(shù)據(jù)幀 |
| CAN 2.0B Active | √ | √ |
| CAN 2.0B Passive | √ | √ |
| CAN 2.0A | √ | - |
?
表1 CAN2.0不同版本的區(qū)別
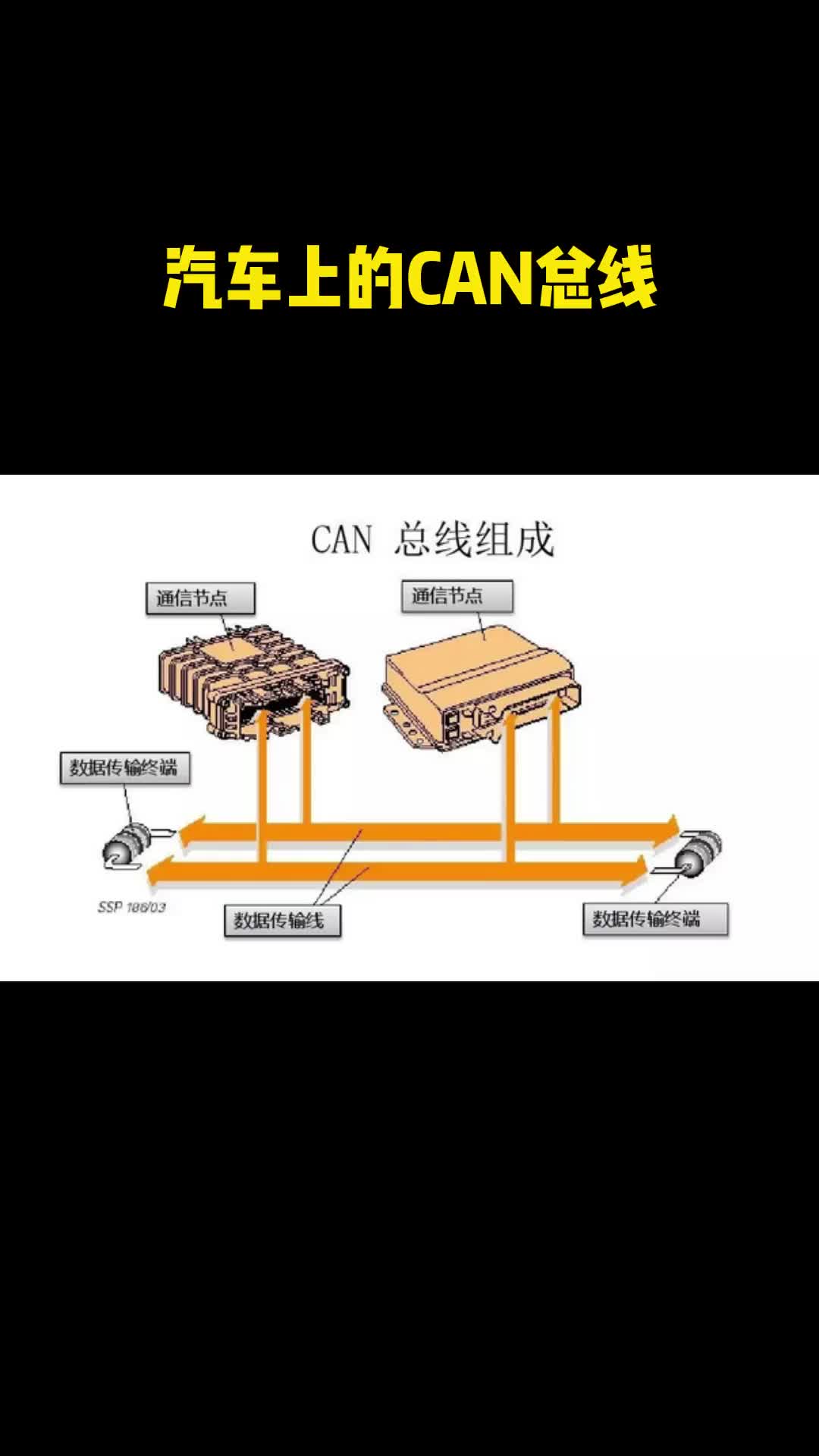
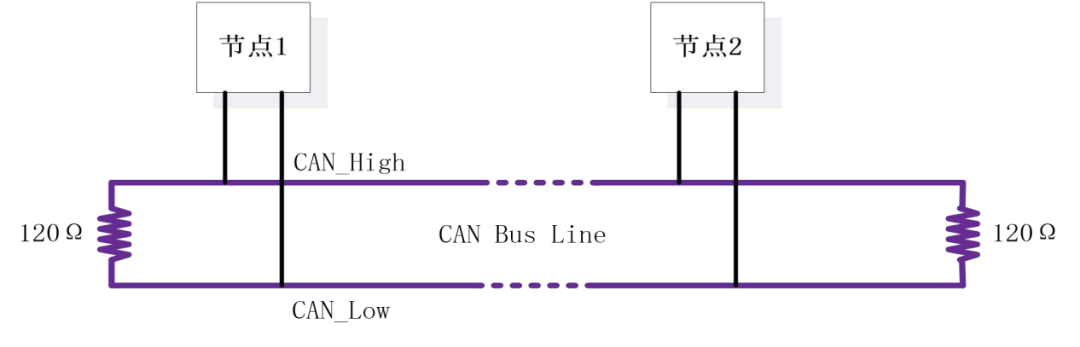
2.2 CAN拓?fù)浣Y(jié)構(gòu)
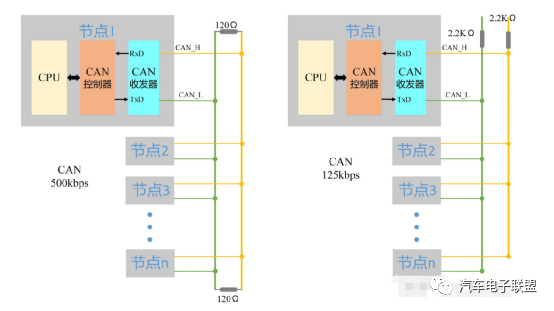
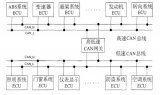
圖2—高速及低速CAN總線的拓?fù)浣Y(jié)構(gòu)
CAN總線包括CAN_H 和 CAN_L 兩根線。節(jié)點(diǎn)通過(guò)CAN控制器和CAN收發(fā)器連接到CAN總線上
2.3 CAN總線電平
在CAN總線上,利用CAN_H和CAN_L兩根線上的電位差來(lái)表示CAN信號(hào)。CAN總線上的電位差分為顯性電平和隱性電平。其中顯性電平為邏輯0,隱性電平為邏輯1。
ISO11898標(biāo)準(zhǔn)(125kbps ~ 1Mbps)和ISO11519標(biāo)準(zhǔn)(10kbps ~ 125kbps)中CAN信號(hào)的表示分別如下所示:
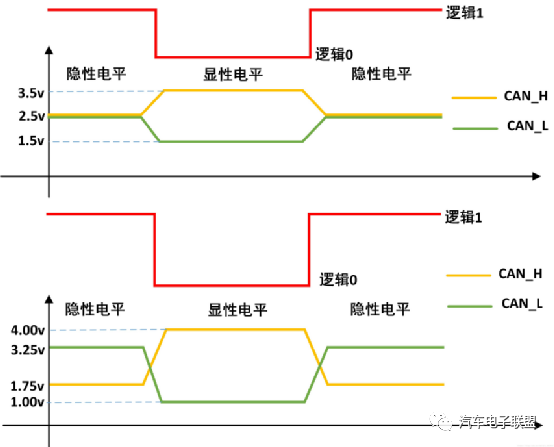
圖3 CAN總線的電平信號(hào)
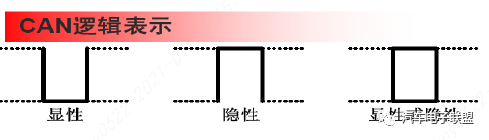
圖4 顯性及隱形電平的表示
2.4 CAN總線的分層
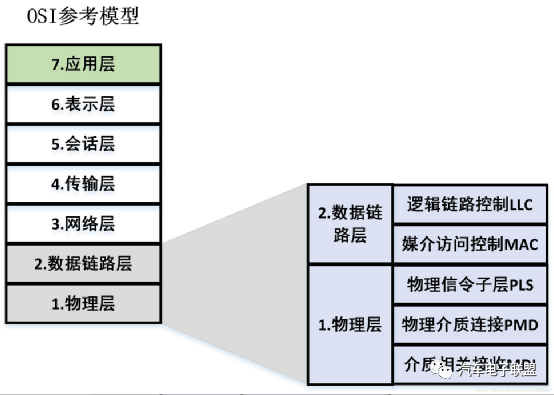
圖5 CAN標(biāo)準(zhǔn)的OSI參考模型
CAN總線網(wǎng)絡(luò)底層只采用了OSI基本參照模型中的數(shù)據(jù)鏈路層、傳輸層。而在CAN網(wǎng)絡(luò)高層僅采用了OSI基本參照模型的應(yīng)用層
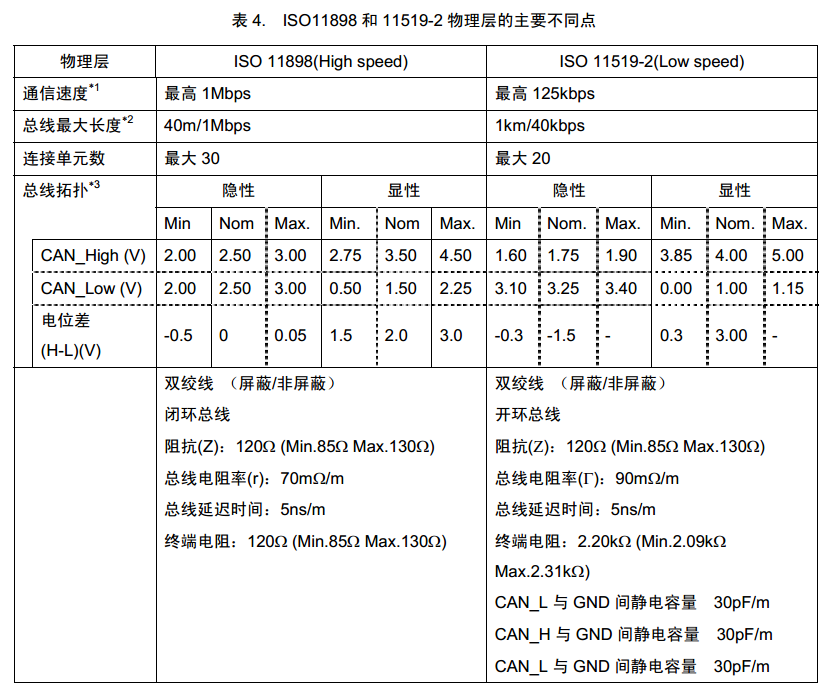
在CAN協(xié)議中,ISO標(biāo)準(zhǔn)只對(duì)數(shù)據(jù)鏈路層和物理層做了規(guī)定。對(duì)于數(shù)據(jù)鏈路層和物理層的一部分,ISO11898和ISO11519-2的規(guī)定是相同,但是在物理層的PMD子層和MDI子層是不同的。
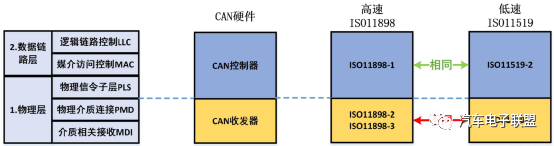
圖6 物理層與數(shù)據(jù)鏈路層
其具體的定義內(nèi)容如下
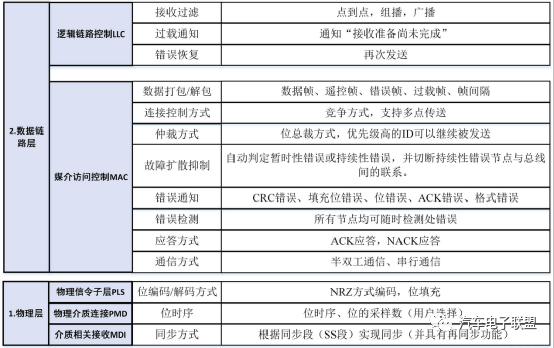
圖7 物理層與數(shù)據(jù)鏈路層定義
03CAN總線數(shù)據(jù)
3.1 CAN的特性
3.1.1 載波偵聽(tīng)
網(wǎng)絡(luò)上各個(gè)節(jié)點(diǎn)在發(fā)送數(shù)據(jù)前都要檢測(cè)總線上是否有數(shù)據(jù)傳輸
網(wǎng)絡(luò)上有數(shù)據(jù)—不發(fā)送數(shù)據(jù),等待網(wǎng)絡(luò)空閑
網(wǎng)絡(luò)上無(wú)數(shù)據(jù)—立即發(fā)送已經(jīng)準(zhǔn)備好的數(shù)據(jù)
3.1.2 多路訪問(wèn)
網(wǎng)絡(luò)上所有的節(jié)點(diǎn)收發(fā)數(shù)據(jù)共同使用同一條總線,且發(fā)送數(shù)據(jù)是廣播式的
3.1.3 沖突避免
節(jié)點(diǎn)在發(fā)送數(shù)據(jù)過(guò)程中要不停地檢測(cè)發(fā)送的數(shù)據(jù),確定是否與其他節(jié)點(diǎn)數(shù)據(jù)發(fā)生沖突
3.1.4 保證系統(tǒng)數(shù)據(jù)一致性
CAN提供了一套復(fù)雜的錯(cuò)誤檢測(cè)與錯(cuò)誤處理機(jī)制,比如CRC檢測(cè),接口的抗電干擾能力,錯(cuò)誤報(bào)文的自動(dòng)重發(fā),臨時(shí)錯(cuò)誤的恢復(fù)以及永久錯(cuò)誤關(guān)閉。
?3.2 CAN的幀格式
在總線中傳送的報(bào)文,每幀由7部分組成。CAN協(xié)議支持兩種報(bào)文格式,其唯一的不同是標(biāo)識(shí)符(ID)長(zhǎng)度不同,標(biāo)準(zhǔn)格式為11位,擴(kuò)展格式為29位。
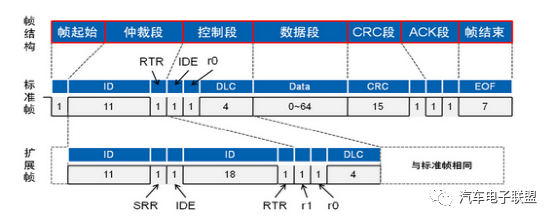
圖8 CAN總線的幀類型和結(jié)構(gòu)
在標(biāo)準(zhǔn)格式中,報(bào)文的起始位稱為幀起始(SOF),然后是由11位標(biāo)識(shí)符和遠(yuǎn)程發(fā)送請(qǐng)求位 (RTR)組成的仲裁場(chǎng)。RTR位表明是數(shù)據(jù)幀還是請(qǐng)求幀,在請(qǐng)求幀中沒(méi)有數(shù)據(jù)字節(jié)。
控制場(chǎng)包括標(biāo)識(shí)符擴(kuò)展位(IDE),指出是標(biāo)準(zhǔn)格式還是擴(kuò)展格式。它還包括一個(gè)保留位 (ro),為將來(lái)擴(kuò)展使用。它的最后四個(gè)位用來(lái)指明數(shù)據(jù)場(chǎng)中數(shù)據(jù)的長(zhǎng)度(DLC)。數(shù)據(jù)場(chǎng)范圍為0~8個(gè)字節(jié),其后有一個(gè)檢測(cè)數(shù)據(jù)錯(cuò)誤的循環(huán)冗余檢查(CRC)。
應(yīng)答場(chǎng)(ACK)包括應(yīng)答位和應(yīng)答分隔符。發(fā)送站發(fā)送的這兩位均為隱性電平(邏輯1),這時(shí)正確接收?qǐng)?bào)文的接收站發(fā)送主控電平(邏輯0)覆蓋它。用這種方法,發(fā)送站可以保證網(wǎng)絡(luò)中至少有一個(gè)站能正確接收到報(bào)文。
報(bào)文的尾部由幀結(jié)束標(biāo)出。在相鄰的兩條報(bào)文間有一很短的間隔位,如果這時(shí)沒(méi)有站進(jìn)行總線存取,總線將處于空閑狀態(tài)。
3.3 CAN總線的數(shù)據(jù)幀組成
3.3.1 遠(yuǎn)程幀
遠(yuǎn)程幀由6個(gè)場(chǎng)組成:幀起始、仲裁場(chǎng)、控制場(chǎng)、CRC場(chǎng)、應(yīng)答場(chǎng)和幀結(jié)束。遠(yuǎn)程幀不存在數(shù)據(jù)場(chǎng)。
遠(yuǎn)程幀的RTR位必須是隱位。
DLC的數(shù)據(jù)值是獨(dú)立的,它可以是0~8中的任何數(shù)值,為對(duì)應(yīng)數(shù)據(jù)幀的數(shù)據(jù)長(zhǎng)度。
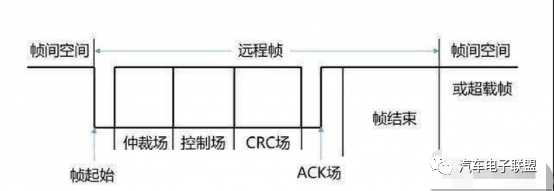
圖9 遠(yuǎn)程幀的格式
3.3.2 錯(cuò)誤幀
錯(cuò)誤幀由兩個(gè)不同場(chǎng)組成,第一個(gè)場(chǎng)由來(lái)自各站的錯(cuò)誤標(biāo)志疊加得到,第二個(gè)場(chǎng)是錯(cuò)誤界定符
錯(cuò)誤標(biāo)志具有兩種形式:
活動(dòng)錯(cuò)誤標(biāo)志(Active error flag),由6個(gè)連續(xù)的顯位組成
認(rèn)可錯(cuò)誤標(biāo)志(Passive error flag),由6個(gè)連續(xù)的隱位組成
錯(cuò)誤界定符包括8個(gè)隱位
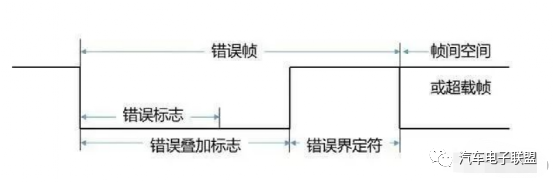
圖10 錯(cuò)誤幀的格式
3.3.3 超載幀
超載幀包括兩個(gè)位場(chǎng):超載標(biāo)志和超載界定符
發(fā)送超載幀的超載條件:
要求延遲下一個(gè)數(shù)據(jù)幀或遠(yuǎn)程幀
在間歇場(chǎng)檢測(cè)到顯位
超載標(biāo)志由6個(gè)顯位組成
超載界定符由8個(gè)隱位組成
3.4 數(shù)據(jù)錯(cuò)誤檢測(cè)
不同于其它總線,CAN協(xié)議不能使用應(yīng)答信息。事實(shí)上,它可以將發(fā)生的任何錯(cuò)誤用信號(hào)發(fā)出。CAN協(xié)議可使用五種檢查錯(cuò)誤的方法,其中前三種為基于報(bào)文內(nèi)容檢查。
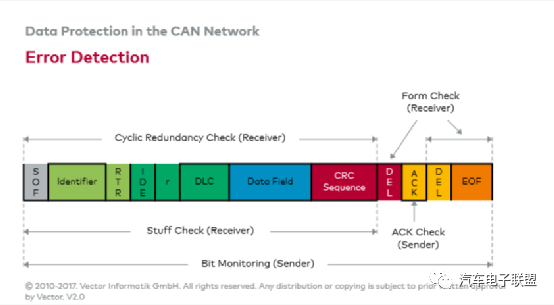
圖11 CAN總線錯(cuò)誤類型
3.4.1循環(huán)冗余檢查(CRC)
在一幀報(bào)文中加入冗余檢查位可保證報(bào)文正確。接收站通過(guò)CRC可判斷報(bào)文是否有錯(cuò)。
3.4.2 幀檢查
這種方法通過(guò)位場(chǎng)檢查幀的格式和大小來(lái)確定報(bào)文的正確性,用于檢查格式上的錯(cuò)誤。
3.4.3.應(yīng)答錯(cuò)誤
如前所述,被接收到的幀由接收站通過(guò)明確的應(yīng)答來(lái)確認(rèn)。如果發(fā)送站未收到應(yīng)答,那么表明接收站發(fā)現(xiàn)幀中有錯(cuò)誤,也就是說(shuō),ACK場(chǎng)已損壞或網(wǎng)絡(luò)中的報(bào)文無(wú)站接收。CAN協(xié)議也可通過(guò)位檢查的方法探測(cè)錯(cuò)誤。
3.4.4 總線檢測(cè)
有時(shí),CAN中的一個(gè)節(jié)點(diǎn)可監(jiān)測(cè)自己發(fā)出的信號(hào)。因此,發(fā)送報(bào)文的站可以觀測(cè)總線電平并探測(cè)發(fā)送位和接收位的差異。
3.4.5 位填充
一幀報(bào)文中的每一位都由不歸零碼表示,可保證位編碼的最大效率。然而,如果在一幀報(bào)文中有太多相同電平的位,就有可能失去同步。為保證同步,同步沿用位填充產(chǎn)生。在五個(gè)連續(xù)相等位后,發(fā)送站自動(dòng)插入一個(gè)與之互補(bǔ)的補(bǔ)碼位;接收時(shí),這個(gè)填充位被自動(dòng)丟掉。例如,五個(gè)連續(xù)的低電平位后,CAN自動(dòng)插入一個(gè)高電平位。CAN通過(guò)這種編碼規(guī)則檢查錯(cuò)誤,如果在一幀報(bào)文中有6個(gè)相同位,CAN就知道發(fā)生了錯(cuò)誤。
3.5 CAN總線的錯(cuò)誤處理
在CAN總線中存在5種錯(cuò)誤類型,它們互相并不排斥,下面簡(jiǎn)單介紹一下它們的區(qū)別、產(chǎn)生的原因及處理方法
3.5.1 錯(cuò)誤產(chǎn)生的原因
位錯(cuò)誤:向總線送出一位的某個(gè)節(jié)點(diǎn)同時(shí)也在監(jiān)視總線,當(dāng)監(jiān)視到總線位的電平和送出的電平不同時(shí),則在該位時(shí)刻檢測(cè)到一個(gè)位錯(cuò)誤。但是在仲裁區(qū)的填充位流期間或應(yīng)答間隙送出隱性位而檢測(cè)到顯性位時(shí),不認(rèn)為是錯(cuò)誤位。送出認(rèn)可錯(cuò)誤標(biāo)注的發(fā)送器,在檢測(cè)到顯性位時(shí)也不認(rèn)為是錯(cuò)誤位。
填充錯(cuò)誤:在使用位填充方法進(jìn)行編碼的報(bào)文中,出現(xiàn)了第6個(gè)連續(xù)相同的位電平時(shí),將檢 測(cè)出一個(gè)填充錯(cuò)誤。
CRC錯(cuò)誤:CRC序列是由發(fā)送器CRC計(jì)算的結(jié)果組成的。接收器以和發(fā)送器相同的方法計(jì)算CRC。如果計(jì)算的結(jié)果和接收到的CRC序列不同,則檢測(cè)出一個(gè)CRC錯(cuò)誤。
形式錯(cuò)誤: 當(dāng)固定形式的位區(qū)中出現(xiàn)一個(gè)或多個(gè)非法位時(shí),則檢測(cè)到一個(gè)形式錯(cuò)誤。
應(yīng)答錯(cuò)誤:在應(yīng)答間隙,發(fā)送器未檢測(cè)到顯性位時(shí),則由它檢測(cè)出一個(gè)應(yīng)答錯(cuò)誤。
檢測(cè)到出錯(cuò)條件的節(jié)點(diǎn)通過(guò)發(fā)送錯(cuò)誤標(biāo)志進(jìn)行標(biāo)定。當(dāng)任何節(jié)點(diǎn)檢測(cè)出位錯(cuò)誤、填充錯(cuò)誤、形式錯(cuò)誤或應(yīng)答錯(cuò)誤時(shí),由該節(jié)點(diǎn)在下一位開(kāi)始發(fā)送出錯(cuò)誤標(biāo)志。
當(dāng)檢測(cè)到CRC錯(cuò)誤時(shí)。出錯(cuò)標(biāo)志在應(yīng)答界定符后面那一位開(kāi)始發(fā)送.除非其他出錯(cuò)條件的錯(cuò)誤標(biāo)志已經(jīng)開(kāi)始發(fā)送。
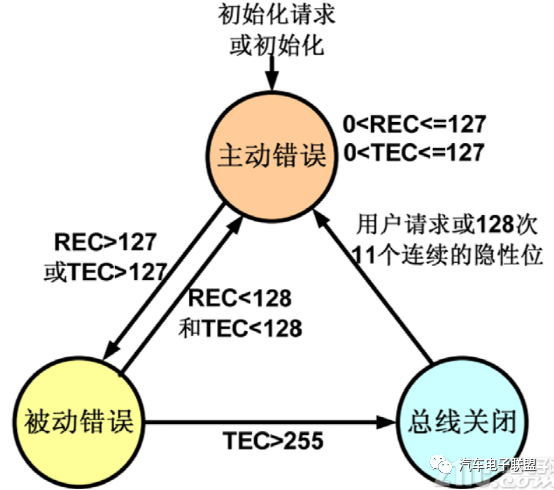
圖12 CAN總線BUS三種錯(cuò)誤
在CAN總線中,任何一個(gè)單元可能處于下列3種故障狀態(tài)之一:錯(cuò)誤激活狀態(tài)(ErrorActive)、錯(cuò)誤認(rèn)可狀態(tài)(Error Passitive)和總線關(guān)閉狀態(tài)(Bus off)。
錯(cuò)誤激活單元可以照常參和總線通信,并且當(dāng)檢測(cè)到錯(cuò)誤時(shí),送出一個(gè)活動(dòng)錯(cuò)誤標(biāo)志。錯(cuò)誤 認(rèn)可節(jié)點(diǎn)可參和總線通信,但是不允許送出活動(dòng)錯(cuò)誤標(biāo)志。當(dāng)其檢測(cè)到錯(cuò)誤時(shí),只能送出認(rèn)可錯(cuò) 誤標(biāo)志,并且發(fā)送后仍為錯(cuò)誤認(rèn)可狀態(tài),直到下一次發(fā)送初始化。總線關(guān)閉狀態(tài)不允許單元對(duì)總 線有任何影響。
3.5.2 CAN總線錯(cuò)誤處理
為了界定故障,在每個(gè)總線單元中都設(shè)有2個(gè)計(jì)數(shù):發(fā)送出錯(cuò)計(jì)數(shù)和接收出錯(cuò)計(jì)數(shù)。這些 計(jì)數(shù)按照下列規(guī)則進(jìn)行。
(1)接收器檢查出錯(cuò)誤時(shí),接收器錯(cuò)誤計(jì)數(shù)器加1,除非所有檢測(cè)錯(cuò)誤是發(fā)送活動(dòng)錯(cuò)誤標(biāo)志或超載標(biāo)志期間的位錯(cuò)誤。
(2)接收器在送出錯(cuò)誤標(biāo)志后的第一位檢查出顯性位時(shí),錯(cuò)誤計(jì)數(shù)器加8。
(3)發(fā)送器送出一個(gè)錯(cuò)誤標(biāo)志時(shí),發(fā)送器錯(cuò)誤計(jì)數(shù)器加8。有兩種情況例外:其一是如果發(fā) 送器為錯(cuò)誤認(rèn)可,由于未檢測(cè)到顯性位應(yīng)答或檢測(cè)到應(yīng)答錯(cuò)誤,并且在送出其認(rèn)可錯(cuò)誤標(biāo)志時(shí),未檢測(cè)到顯性位;另外一種情況是如果仲裁器件產(chǎn)生填充錯(cuò)誤,發(fā)送器送出一個(gè)隱性位錯(cuò)誤標(biāo)志,而檢測(cè)到的是顯性位。除以上兩種情況外,發(fā)送器錯(cuò)誤計(jì)數(shù)器計(jì)數(shù)不改變。
(4)發(fā)送器送出一個(gè)活動(dòng)錯(cuò)誤標(biāo)志或超載標(biāo)志時(shí),檢測(cè)到位錯(cuò)誤,則發(fā)送器錯(cuò)誤計(jì)數(shù)器加8。
(5)在送出活動(dòng)錯(cuò)誤標(biāo)志、認(rèn)可錯(cuò)誤標(biāo)志或超載錯(cuò)誤標(biāo)志后,任何節(jié)點(diǎn)都最多允許連續(xù)7個(gè)顯性位。在檢測(cè)到第11個(gè)連續(xù)顯性位后,或緊隨認(rèn)可錯(cuò)誤標(biāo)志檢測(cè)到第8個(gè)連續(xù)的顯性位,以及附加的8個(gè)連續(xù)的顯性位的每個(gè)序列后,每個(gè)發(fā)送器的發(fā)送錯(cuò)誤計(jì)數(shù)都加8,并且每個(gè)接收器的接收錯(cuò)誤計(jì)數(shù)也加8。
(6)報(bào)文成功發(fā)送后,發(fā)送錯(cuò)誤計(jì)數(shù)減1,除非計(jì)數(shù)值已經(jīng)為0。
(7)報(bào)文成功發(fā)送后,如果接收錯(cuò)誤計(jì)數(shù)處于1~127之間,則其值減1;如果接收錯(cuò)誤計(jì)數(shù)為0,則仍保持為0;如果大于127,則將其值記為119~127之間的某個(gè)數(shù)值。
(8)當(dāng)發(fā)送錯(cuò)誤計(jì)數(shù)等于或大于128,或接收錯(cuò)誤計(jì)數(shù)等于或大于128時(shí),節(jié)點(diǎn)進(jìn)入錯(cuò)誤認(rèn),可狀態(tài),節(jié)點(diǎn)送出一個(gè)活動(dòng)錯(cuò)誤標(biāo)志。
(9)當(dāng)發(fā)送錯(cuò)誤計(jì)數(shù)器大于或等于256時(shí),節(jié)點(diǎn)進(jìn)入總線關(guān)閉狀態(tài)。
(1O)當(dāng)發(fā)送錯(cuò)誤計(jì)數(shù)和接收錯(cuò)誤計(jì)數(shù)均小于或等于127時(shí),錯(cuò)誤認(rèn)可節(jié)點(diǎn)再次變?yōu)殄e(cuò)誤激活節(jié)點(diǎn)。
(11)在檢測(cè)到總線上11個(gè)連續(xù)的隱性位發(fā)送128次后,總線關(guān)閉節(jié)點(diǎn)將變?yōu)?個(gè)錯(cuò)誤計(jì)數(shù)器均為0的錯(cuò)誤激活節(jié)點(diǎn)。
(12)當(dāng)錯(cuò)誤計(jì)數(shù)器數(shù)值大于96時(shí),說(shuō)明總線被嚴(yán)重干擾。
如果系統(tǒng)啟動(dòng)期間僅有1個(gè)節(jié)點(diǎn)掛在總線上,此節(jié)點(diǎn)發(fā)出報(bào)文后,將得不到應(yīng)答,檢查出錯(cuò)誤并重復(fù)該報(bào)文,此時(shí)該節(jié)點(diǎn)可以變?yōu)殄e(cuò)誤認(rèn)可節(jié)點(diǎn),但不會(huì)因此關(guān)閉總線。
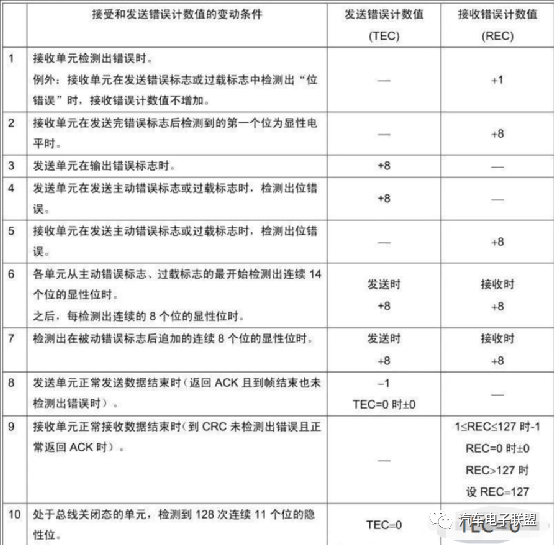
圖13 CAN總線錯(cuò)誤處理機(jī)制
3.6 CAN總線的優(yōu)點(diǎn)
廢除傳統(tǒng)的站地址編碼,代之以對(duì)通信數(shù)據(jù)塊進(jìn)行編碼,可以多主方式工作;
采用非破壞性仲裁技術(shù),當(dāng)兩個(gè)節(jié)點(diǎn)同時(shí)向網(wǎng)絡(luò)上傳送數(shù)據(jù)時(shí),優(yōu)先級(jí)低的節(jié)點(diǎn)主動(dòng)停止數(shù)據(jù)發(fā)送,而優(yōu)先級(jí)高的節(jié)點(diǎn)可不受影響繼續(xù)傳輸數(shù)據(jù),有效避免了總線沖突;
采用短幀結(jié)構(gòu),每一幀的有效字節(jié)數(shù)為8個(gè),數(shù)據(jù)傳輸時(shí)間短,受干擾的概率低,重新發(fā)送的時(shí)間短;
每幀數(shù)據(jù)都有CRC校驗(yàn)及其他檢錯(cuò)措施,保證了數(shù)據(jù)傳輸?shù)母呖煽啃裕m于在高干擾環(huán)境下使用;
節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下,具有自動(dòng)關(guān)閉總線的功能,切斷它與總線的聯(lián)系,以使總線上其他操作不受影響;
可以點(diǎn)對(duì)點(diǎn),一對(duì)多及廣播集中方式傳送和接受數(shù)據(jù)。
具有實(shí)時(shí)性強(qiáng)、傳輸距離較遠(yuǎn)、抗電磁干擾能力強(qiáng)、成本低等優(yōu)點(diǎn);
采用雙線串行通信方式,檢錯(cuò)能力強(qiáng),可在高噪聲干擾環(huán)境中工作;
具有優(yōu)先權(quán)和仲裁功能,多個(gè)控制模塊通過(guò)CAN控制器掛到CAN-Bus上,形成多主機(jī)局部網(wǎng)絡(luò);
可根據(jù)報(bào)文的ID決定接收或屏蔽該報(bào)文;
可靠的錯(cuò)誤處理和檢錯(cuò)機(jī)制;
發(fā)送的信息遭到破壞后,可自動(dòng)重發(fā);
節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)退出總線的功能;
報(bào)文不包含源地址或目標(biāo)地址,僅用標(biāo)志符來(lái)指示功能信息、優(yōu)先級(jí)信息。
?
審核編輯:湯梓紅





























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論