MCS-51單片機(jī)組成CAN通信系統(tǒng)需要擴(kuò)展CAN控制器,本系統(tǒng)采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產(chǎn)的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:00 5734
5734 
大家好,我是嵌入式老林,從事嵌入式軟件開發(fā)多年,今天分享的內(nèi)容是MCAL的CAN模塊配置介紹,希望能對(duì)你有所幫助
2023-12-12 15:31:361126 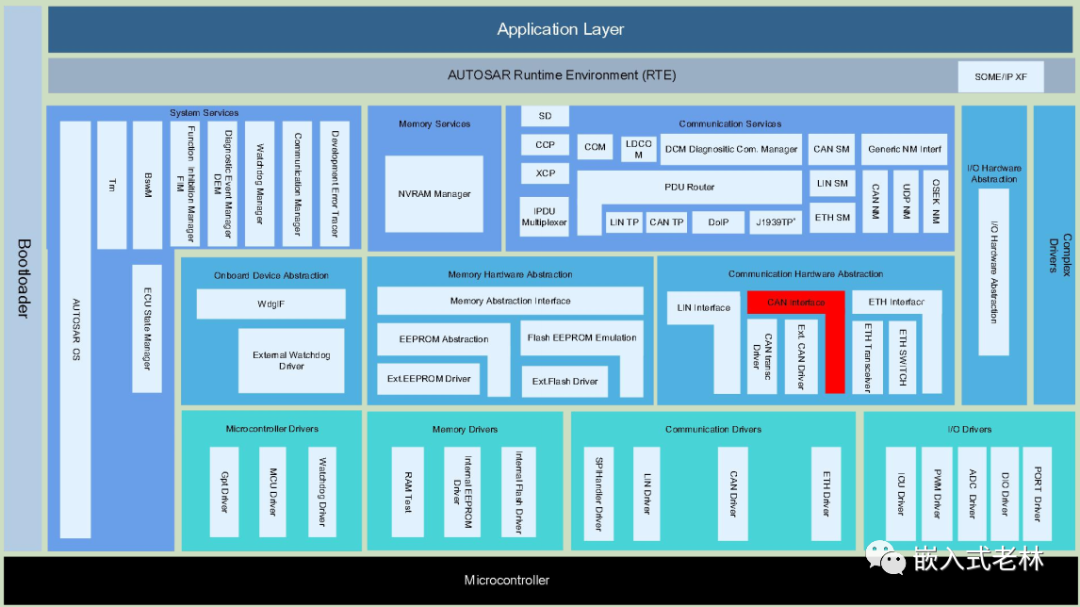
就是通過9個(gè)51單片機(jī)之間通過CAN總線模塊(MCP2515)進(jìn)行數(shù)據(jù)傳輸,其中每個(gè)單片機(jī)只對(duì)固定的四個(gè)不同的單片機(jī)傳輸不同的四個(gè)數(shù)據(jù)這四個(gè)數(shù)據(jù)是該單片機(jī)的四個(gè)測(cè)量值只需要做CAN總線通信部分,只要程序就行
2016-03-16 16:01:36
有點(diǎn)困惑:XS128的CAN模塊當(dāng)同一時(shí)間接收到多個(gè)報(bào)文時(shí)有優(yōu)先級(jí)嗎?如果多個(gè)數(shù)據(jù)幀的報(bào)文ID一樣并同一時(shí)間(假如每10ms同時(shí))發(fā)送給單片機(jī)CAN模塊,此時(shí)設(shè)置CAN模塊接收中斷后,是只產(chǎn)生一個(gè)接收中斷呢還是每個(gè)數(shù)據(jù)幀都會(huì)引發(fā)一個(gè)接收中斷?
2015-12-30 11:03:46
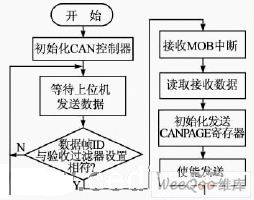
CANTCON=0x00;//CAN時(shí)鐘寄存器清零CANGCON |= 0x01;//軟件復(fù)位CANBT1=0x06;CANBT2=0x2a;CANBT3=0x13;//設(shè)置通信波特率為
2021-07-13 08:46:33
最近在研究CAN通信的***協(xié)議,其中***協(xié)議里的CRO命令中的命令序號(hào)(CTR)是怎么給的?我想用基于CCP協(xié)議用單片機(jī)采集ECU數(shù)據(jù)
2015-11-17 09:31:53
需要接CAN控制器及電平轉(zhuǎn)換器才能使用CAN通信。有自帶CAN總線的單片機(jī)控制CAN通信實(shí)際上也是操作單片機(jī)
2021-08-20 07:40:23
最近測(cè)試中在整車加入一塊傳感器通信的板子,結(jié)果加上去就無法通信,開始一直以為是程序問題,后來直接debug單片機(jī)程序。發(fā)現(xiàn)CAN的發(fā)送程序已經(jīng)執(zhí)行,可是總線上沒有信號(hào)。最后發(fā)現(xiàn)是硬件問題,匹配
2021-08-20 08:12:42
一、can通信介紹1、基本概念:CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標(biāo)準(zhǔn)化的串行通信協(xié)議。在汽車產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低
2021-08-19 07:58:04
can節(jié)點(diǎn),理論上,STM32就可以接入100多個(gè)串口設(shè)備了。但是,只使用一個(gè)【can串口】模塊,是無法使串口設(shè)備與STM32通信的,因?yàn)?b class="flag-6" style="color: red">單片機(jī)都是TTL電平(0~3.3或5V),是無法與can總線(差分電平2.3V)通信的,所以必須有一個(gè)模塊能夠把單片機(jī)發(fā)出的信號(hào)轉(zhuǎn)換為CAN
2021-08-19 07:14:58
本文主要簡(jiǎn)單介紹CAN總線的相關(guān)概念,以及通信協(xié)議等知識(shí),和使用STM32自帶的bxCAN外設(shè)進(jìn)行CAN總線編程實(shí)驗(yàn),以及編程心得。
2021-08-19 08:01:12
主要介紹單片機(jī) IAP 開發(fā)的設(shè)計(jì)思路,如何不使用下載燒錄器的方式對(duì)單片機(jī)的程序進(jìn)行升級(jí),升級(jí)區(qū)域包括 bootloader 和用戶程序的升級(jí),升級(jí)方式有 UASRT 通信、CAN 通信和 OTA 升級(jí)。本文目前介紹的是 bootloader 對(duì)用戶程序區(qū)升級(jí)的開發(fā)設(shè)計(jì)思路,稱其為 IAP。
2021-11-22 07:44:49
。初學(xué)者完全可以在不深入了解匯編指令系統(tǒng)的情況下,直接開始C語言的學(xué)習(xí)。本章介紹MSP430單片機(jī)軟件工程的開發(fā)基礎(chǔ),主要講解MSP430單片機(jī)C語言編程基礎(chǔ)、MSP430單片機(jī)的軟件編程方法及軟件集...
2021-12-21 06:22:37
求一個(gè)基于TJA1050,MCP2515can模塊的雙51單片機(jī)簡(jiǎn)單通信的程序
2019-05-26 14:58:07
我是單片機(jī)小白,求麥肯單片機(jī) MDT10P509編程軟件,那里有怎么下載,各位大神幫忙。
2017-06-11 15:15:49
單片機(jī)要與上位機(jī)通過can總線進(jìn)行通信,怎樣構(gòu)建硬件電路及程序編寫,求各位大神指導(dǎo)啊……
2014-08-08 13:59:59
AT90CAN128單片機(jī)上電后晶振輸出口電壓是多少?為什么我的單片機(jī)外部接了晶振以后晶振無法震蕩,此款單片機(jī)振蕩需要進(jìn)行熔絲設(shè)置嗎?著及知道答案,請(qǐng)各位大神指點(diǎn)迷津。跪謝
2015-11-21 09:38:24
結(jié)構(gòu)在速度比常規(guī)的RISC單片機(jī)快10倍的同時(shí)代碼效率更高。AT90CAN64 是采用Atmel高密度非易失存儲(chǔ)器技術(shù)制造的,其在片ISP Flash允許程序存儲(chǔ)器通過一個(gè)常規(guī)的非易失存儲(chǔ)器編程器或一個(gè)
2013-09-04 10:52:04
AT90CAN AVR Devices - Interface, CAN Evaluation Board
2023-03-29 22:53:17
,與AT90S8515相同的內(nèi)容這里省略。其它AVR單片機(jī),簡(jiǎn)要介紹其性能特點(diǎn),引腳圖及硬件結(jié)構(gòu)框圖,更詳細(xì)資料(中、英文)可上網(wǎng)下載,WWW.SL.COM.CN或向廣州天河雙龍電子公司郵購光盤,有整套開發(fā)工作軟件,大量實(shí)用實(shí)驗(yàn)程序,AT90系列器件最新中英文資料。
2011-03-07 15:27:32
的錯(cuò)誤處理和檢錯(cuò)機(jī)制、發(fā)送的信息遭到破壞以后,可自動(dòng)重發(fā)、節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)退出總線的功能、報(bào)文不含源地址和目標(biāo)地址,僅用標(biāo)識(shí)符來指示功能信息和優(yōu)先級(jí)信息。單片機(jī)與CAN總線連接的傳統(tǒng)方式是將
2011-03-03 14:15:52
STM32單片機(jī)CAN通信與DMA方式ADC調(diào)試記錄1.Can的濾波器1.1.濾波器組合11.2.濾波器組合21.3.濾波器組合32.靜默和環(huán)回模式2.1.正常模式2.2.靜默模式2.3環(huán)回模式
2021-08-19 07:19:17
完全無需了解復(fù)雜的USB協(xié)議的情況下,即可方便的開發(fā)出CAN系統(tǒng)應(yīng)用軟件產(chǎn)品,大大簡(jiǎn)化了USB開發(fā)的難度。USB轉(zhuǎn)CAN串口通信模塊廣泛應(yīng)用于通過PC或筆記本的USB接口實(shí)現(xiàn)對(duì)CAN總線網(wǎng)絡(luò)的發(fā)送和接收
2011-05-27 09:13:53
編譯這里程序的編譯,還是使用上節(jié)介紹的 Makefile 來編譯 。使用的交叉編譯器是: arm-linux-gnueabihf-gcc。編譯后查看, 如下圖 :4 通信測(cè)試4.1 USB轉(zhuǎn)CAN模塊
2016-07-31 20:26:41
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機(jī)固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實(shí)現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
最近在研究CAN通信的ccp協(xié)議,其中ccp協(xié)議里的CRO命令中的命令序號(hào)(CTR)是怎么給的?我基于CCP協(xié)議用單片機(jī)采集ECU數(shù)據(jù)
2015-11-17 09:34:55
如何實(shí)現(xiàn)AT90CAN單片機(jī)與PC機(jī)間的CAN通信?
2021-09-24 08:56:15
飛思卡爾單片機(jī)CAN模塊的物理特性的示波器觀察。通過示波器觀察單片機(jī)的CAN兩個(gè)物理pin的輸出或者說輸入信號(hào)。發(fā)現(xiàn)其在發(fā)送,并不接收的時(shí)候,兩個(gè)電平均有動(dòng)作。這說明這兩個(gè)拐角的發(fā)送和接受并不是簡(jiǎn)單
2022-01-10 07:48:07
《手把手教你學(xué)CAN總線》以CAN總線的通信實(shí)例和基本實(shí)驗(yàn)為主線,以單片機(jī)、數(shù)據(jù)通信和工業(yè)控制網(wǎng)絡(luò)的基礎(chǔ)知識(shí)為出發(fā)點(diǎn),介紹了CAN現(xiàn)場(chǎng)總線的基本概念、CAN節(jié)點(diǎn)的硬件設(shè)計(jì)和軟件編程的方法。其立足點(diǎn)
2018-04-08 21:17:12
上篇博客中,我們用單片機(jī)的串口對(duì)驅(qū)動(dòng)器進(jìn)行了控制,串口控制的優(yōu)點(diǎn)是控制相對(duì)簡(jiǎn)單。咨詢過拓達(dá)的工程師這個(gè)問題之后我們,了解到 CAN通信的速度快很多。先來分析一下CAN通信為什么要快:1、從數(shù)據(jù)手冊(cè)上
2021-06-28 06:50:06
單片機(jī)與單片機(jī)CAN通信,誰能來點(diǎn)這方面的資料,或者源程序啊,謝謝,整個(gè)板塊幾乎沒這塊的資料,哎,求幫助
2014-11-09 21:34:44
求一個(gè)pic18f25k80單片機(jī)的can通信源程序。模式“0”主函數(shù)里面能夠不斷發(fā)送數(shù)據(jù)中斷法接收數(shù)據(jù)
2013-07-01 17:02:36
基于STM32的CAN總線通信學(xué)習(xí)筆記本文主要簡(jiǎn)單介紹CAN總線的相關(guān)概念,以及通信協(xié)議等知識(shí),和使用STM32自帶的bxCAN外設(shè)進(jìn)行CAN總線編程實(shí)驗(yàn),以及編程心得。1. CAN總線簡(jiǎn)要介紹概念:CAN是控制器局域網(wǎng)絡(luò)(Controller Area Netwo...
2021-08-19 07:23:37
有誰幫幫忙啊,現(xiàn)在正在學(xué)習(xí)CAN總線技術(shù),買了一個(gè)CAN I模塊,但是不知道怎樣與電腦、單片機(jī)的連接還有一些需要注意的問題,如初始化什么的,在此尋求各位高手們的相助,小弟在此謝過了。
2019-09-19 07:22:50
單片機(jī)編程用什么軟件?單片機(jī)開發(fā)軟件有哪些?
2021-11-03 06:34:09
STM32F107的CAN接收中斷里需要發(fā)送某個(gè)報(bào)文作為應(yīng)答信號(hào),還是單片機(jī)自動(dòng)完成?如果自動(dòng)完成的 為什么我500k波特率時(shí) 開啟自動(dòng)重傳功能后 總線負(fù)荷過重, 通信混亂,這可以說明需要我們自己再編程給出應(yīng)答信號(hào)嗎?
2018-08-29 09:37:36
請(qǐng)問各位高手,哪種型號(hào)的單片機(jī)有CAN總線,最好是51的。有知道的告訴一下,我是新手,感激不盡。
2020-03-25 09:01:29
STC89C52調(diào)試can總線-SJA1000記錄(代碼都測(cè)試過)can通信模塊51單片機(jī)系統(tǒng)板最小系統(tǒng)板另外一些需要注意點(diǎn)最近調(diào)試51單片機(jī)的can總線,網(wǎng)上的資料相對(duì)而言實(shí)在是比較少,在調(diào)試
2021-11-18 07:24:36
的效率,簡(jiǎn)化電路設(shè)計(jì)上的復(fù)雜性,保證電路的電氣兼容性,本文采用PHILIPS公司生產(chǎn)的P89C668單片機(jī)和CAN控制器SJA1000設(shè)計(jì)了CAN接口節(jié)點(diǎn)電路,并介紹了相關(guān)的軟件設(shè)計(jì). 1 CAN總線
2019-05-06 09:18:17
介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計(jì)基于CAN 總線的多ECU 通信平臺(tái)的硬件結(jié)構(gòu); 闡述節(jié)點(diǎn)ECU 通信的軟件設(shè)計(jì)方法,在仿真試驗(yàn)的條件下實(shí)現(xiàn)數(shù)據(jù)通信的功能。試驗(yàn)表明該平臺(tái)運(yùn)行
2009-04-15 09:49:53 22
22 主要介紹CAN 總線的原理及如何用87C196NT 單片機(jī)實(shí)現(xiàn)基于CAN 總線的網(wǎng)絡(luò)通信;對(duì)其硬件和軟件設(shè)計(jì)作較詳細(xì)的分析, 最后給出下位機(jī)程序。
2009-04-16 14:26:3033 采用AT90CAN128的CAN系統(tǒng)解決方案:AT90CAN128是一種基于AVR增強(qiáng)型RISC結(jié)構(gòu)的低功耗CMOS 8-位單片機(jī)。通過執(zhí)行以一個(gè)單時(shí)鐘周期的高效指令,AT90CAN128每MHz能達(dá)1MIPS,這就可讓系統(tǒng)設(shè)計(jì)人員將
2009-04-21 21:51:5048 宏觀意義上來說,工程機(jī)械控制器主要由電源模塊、通信模塊、輸出驅(qū)動(dòng)模塊、輸入模塊和MCU模塊構(gòu)成。CAN通信是一種多主總線,每個(gè)節(jié)點(diǎn)機(jī)均可成為主機(jī),且節(jié)點(diǎn)機(jī)之間也可進(jìn)行通信。控制器采用
2022-08-30 16:20:15
CAN 總線上的節(jié)點(diǎn)是網(wǎng)絡(luò)上的信息接收和發(fā)送站。智能節(jié)點(diǎn)能通過編程設(shè)置工作方式、ID地址、波特率等參數(shù)。它主要由單片機(jī)和可編程的CAN 通信控制器組成。本文介紹這類節(jié)點(diǎn)的硬
2009-05-13 16:11:3952 介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計(jì)基于CAN 總線的多ECU 通信平臺(tái)的硬件結(jié)構(gòu); 闡述節(jié)點(diǎn)ECU 通信的軟件設(shè)計(jì)方法,在仿真試驗(yàn)的條件下實(shí)現(xiàn)數(shù)據(jù)通信的功能。試驗(yàn)表明該平臺(tái)運(yùn)行
2009-05-16 14:19:0828 簡(jiǎn)要介紹了AT90CAN128 的功能特點(diǎn),講述了AT90CAN128 中CAN 控制器的原理及使用方法,針對(duì)所設(shè)計(jì)車型CAN 總線控制系統(tǒng)的構(gòu)成特點(diǎn),制定了通信協(xié)議,并以聯(lián)合制動(dòng)單元為具體實(shí)例,
2009-05-27 11:50:1232 簡(jiǎn)要介紹了AT90CAN128 的功能特點(diǎn),講述了AT90CAN128 中CAN 控制器的原理及使用方法,針對(duì)所設(shè)計(jì)車型CAN 總線控制系統(tǒng)的構(gòu)成特點(diǎn),制定了通信協(xié)議,并以聯(lián)合制動(dòng)單元為具體實(shí)例,對(duì)
2009-05-27 14:23:5315 本文介紹了一種基于CAN總線的網(wǎng)絡(luò)監(jiān)控系統(tǒng)方案。該方案使用CAN卡和DSP中的CAN模塊作為上下位機(jī)通信接口,研究了CAN通信協(xié)議模型,VC++與CAN卡的通信接口,DSP中CAN模塊通信的數(shù)據(jù)處
2009-06-01 15:32:2227 本文提出了一種以CAN 總線為基礎(chǔ)的數(shù)據(jù)采集模塊設(shè)計(jì)方案,介紹了該數(shù)據(jù)采集模塊的功能、軟件、硬件設(shè)計(jì)方法。實(shí)驗(yàn)證明基于CAN 總線的數(shù)據(jù)采集模塊具有結(jié)構(gòu)簡(jiǎn)單、轉(zhuǎn)換速度
2009-06-15 08:11:0914 本文以 C8051F120 單片機(jī)為背景,在CAN V2.0 技術(shù)規(guī)范的基礎(chǔ)上提出了一種基于單片機(jī)的CAN 應(yīng)用層協(xié)議。文中首先設(shè)計(jì)了一種數(shù)據(jù)傳遞格式,它解決了CAN V2.0 規(guī)范只能傳遞小于8 字
2009-06-17 07:49:1648 CAN總線上的智能節(jié)點(diǎn)是網(wǎng)絡(luò)上報(bào)文的接收和發(fā)送站,一般由單片機(jī)和可編程的CAN通信控制器組成。本文介紹了一種新型的獨(dú)立CAN 通信控制器MCP2515;給出其在CAN總線系統(tǒng)智能節(jié)
2009-06-26 10:38:51140 在將嵌入式實(shí)時(shí)操作系統(tǒng)μC/OS-II成功移植到MB90F543單片機(jī)的基礎(chǔ)上,論文介紹了將雙CAN通信程序模塊作為一個(gè)構(gòu)件嵌入到μC/OS-II中,在多個(gè)節(jié)點(diǎn)之間實(shí)現(xiàn)了基于μC/OS-II的雙CAN冗余通信
2009-08-12 17:28:4127 本文首先介紹了EPSON 公司的32 位單片機(jī)的性能特點(diǎn),然后以S1C33209 和Philips公司的SJA1000 型控制器為核心,介紹了一種基于CAN 總線的探測(cè)系統(tǒng)的結(jié)構(gòu),重點(diǎn)對(duì)軟件設(shè)計(jì)作詳細(xì)介紹。
2009-08-13 09:18:0217 本文完成了基于單片機(jī)控制的CAN 與RS-232 轉(zhuǎn)換器的研究與設(shè)計(jì),設(shè)計(jì)了AT89C51單片機(jī)對(duì)RS-232 接口和CAN 模塊的控制,解決了CAN 總線與RS-232 接口數(shù)據(jù)通信速率以及通信幀格式不同的技
2009-08-31 11:45:4462 摘要:CAN(ControllerAreaNetwork)總線是一種使用CAN協(xié)議的串行通信網(wǎng)絡(luò)。SiliconLaboratories公司的單片機(jī)C8051F040是完全集成的混合信號(hào)系統(tǒng)級(jí)芯片,而且內(nèi)部集成了CAN控制器。文中對(duì)該芯片
2010-06-28 14:25:1541 采用Infineon XC2000系列單片機(jī)實(shí)現(xiàn)CAN網(wǎng)關(guān)模塊,利用MFC編寫PC端網(wǎng)關(guān)配置軟件。該系列單片機(jī)MultiCAN模塊可實(shí)現(xiàn)不同速率的獨(dú)立CAN網(wǎng)絡(luò)之間的數(shù)據(jù)接收、存儲(chǔ)、轉(zhuǎn)發(fā);能夠過濾不需要的C
2010-07-30 11:17:3717 摘要:CAN總線上的節(jié)點(diǎn)是網(wǎng)絡(luò)上的信息接收和發(fā)送站;智能節(jié)點(diǎn)能通過編程設(shè)置工作方式、ID、地址、波特率等參數(shù)。它主要由單片機(jī)和可編程的CAN通信控制器組成。本文介紹這類節(jié)
2010-12-20 22:18:4044 ?摘要:介紹了一種用單片機(jī)ADμC812、CAN總線控制器SJA1000和CAN總線驅(qū)動(dòng)器POA82C250組成的CAN總線智能節(jié)點(diǎn)的設(shè)計(jì)方案,給出了該節(jié)點(diǎn)的硬件結(jié)構(gòu)和軟件設(shè)計(jì)方法,同時(shí)介紹
2006-03-11 11:47:39949 
摘要:介紹CAN總線及其通信協(xié)議J1939,并設(shè)計(jì)基于CAN總線的多ECN通信平臺(tái)的硬件結(jié)構(gòu);闡述節(jié)點(diǎn)ECN通信的軟件設(shè)計(jì)方法,在仿真試驗(yàn)的條件下實(shí)現(xiàn)數(shù)
2006-03-11 13:21:031634 
SPMC65單片機(jī)在CAN總線智能節(jié)點(diǎn)中的應(yīng)用
本文主要介紹如何使用SPMC65P2404A單片機(jī)設(shè)計(jì)開發(fā)CAN總線
2009-09-19 10:45:14700 
基于PIC單片機(jī)的RS-232轉(zhuǎn)CAN通信適配卡設(shè)計(jì)
CAN總線-控制器局部網(wǎng)(CAN)國際標(biāo)準(zhǔn)(ISO11898)。CAN總線與一般的通信總線相比,它的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性
2010-01-27 16:24:061328 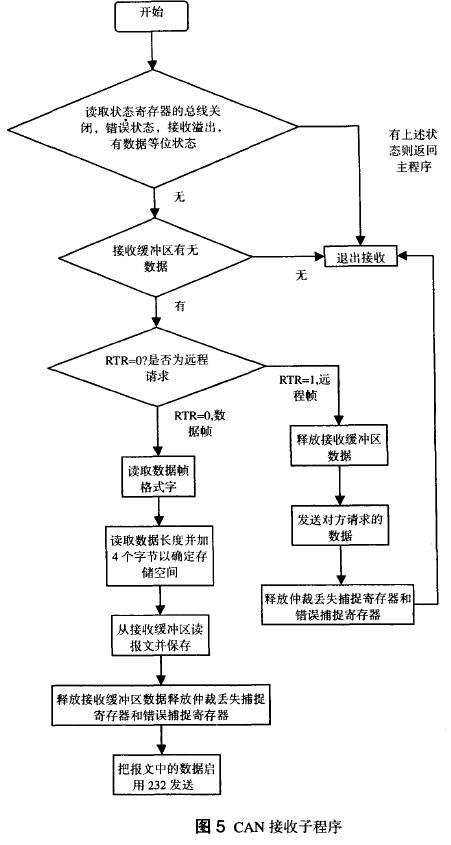
CAN-RS232通信轉(zhuǎn)換模塊的設(shè)計(jì)與實(shí)現(xiàn)
摘要:設(shè)計(jì)了一個(gè)結(jié)構(gòu)簡(jiǎn)單、使用方便、應(yīng)用面廣的CAN節(jié)點(diǎn)與RS232串口通信轉(zhuǎn)換模塊.詳細(xì)介紹了該模塊的工作原理和實(shí)現(xiàn)方法,即
2010-02-25 16:56:071964 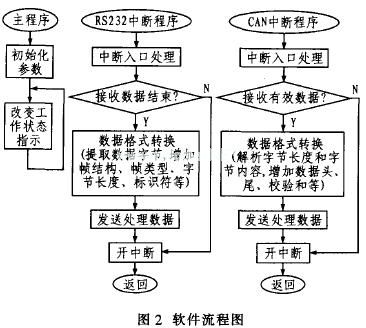
在分析了RS-485總線與CAN部遲疑不決的異同點(diǎn)后,以PCA82C250型接口電路為例提出了用CAN總線通信物理層接口電路來替代RS-485總線接口中電路與單片機(jī)直接連接進(jìn)行 通信網(wǎng)絡(luò) 設(shè)計(jì),從而可
2011-09-27 15:40:335678 
AT90CAN128是一種基于AVR增強(qiáng)型RISC結(jié)構(gòu)的低功耗CMOS 8-位單片機(jī)。通過執(zhí)行以一個(gè)單時(shí)鐘周期的高效指令,AT90CAN128每MHz能達(dá)1MIPS,這就可讓系統(tǒng)設(shè)計(jì)人員將功率損耗與處理速度優(yōu)化。
2012-03-09 14:09:2198 本文介紹了Freescale公司MC9S12X系列雙核單片機(jī)在混合動(dòng)力汽車整車控制器中應(yīng)用的優(yōu)點(diǎn),給出了其進(jìn)行CAN總線通信的硬件接口設(shè)計(jì)與執(zhí)行流程。
2012-09-11 16:56:427726 摘要:現(xiàn)場(chǎng)總線已成為數(shù)據(jù)總線領(lǐng)域中最為活躍的熱點(diǎn),CAN 總線被公認(rèn)為最有前途的現(xiàn)場(chǎng)總線之一,CAN 總線節(jié)點(diǎn)的設(shè)計(jì)、調(diào)試是CAN 總線通訊系統(tǒng)設(shè)計(jì)的重點(diǎn)。在此介紹了C8051F040單片機(jī)
2013-03-06 15:24:4571 Atmel 8bit AVR Microcontroller with 32K/64K/128K Bytes of ISP Flash and CAN Controller,Atmel的8位單片機(jī)
2015-11-26 16:39:2434 CAN總線上的智能節(jié)點(diǎn)是網(wǎng)絡(luò)上報(bào)文的接收和發(fā)送站一般由單片機(jī)和可編程的通信控制器組成 本文介紹了一種新型的獨(dú)立CAN 通信控制器給出其在CAN 總線系統(tǒng)智能節(jié)點(diǎn)中的一個(gè)應(yīng)用實(shí)例" 硬件設(shè)計(jì)給出了節(jié)點(diǎn)的電路原理圖" 軟件設(shè)計(jì)給出了系統(tǒng)程序的設(shè)計(jì)流程圖"并對(duì)其作了簡(jiǎn)要的說明。
2016-04-01 09:41:020 CAN總線是幾種最有前途的現(xiàn)場(chǎng)總線之一。但是CAN總線開發(fā)需要一定的技術(shù)基礎(chǔ),如何在較短的時(shí)間內(nèi)開發(fā)出一套可靠性高、實(shí)時(shí)性好的CAN系統(tǒng),成為眾多電子開發(fā)人員十分關(guān)注的問題。采用AVR單片機(jī)作為
2016-10-11 15:35:0134 基于STM32單片機(jī)的CAN總線分析儀的設(shè)計(jì)
2017-01-24 16:54:2441 基于87C196NT單片機(jī)實(shí)現(xiàn)CAN總線通信
2017-09-04 15:26:574 AVR914 CAN UART based Bootloader for AT90CAN32_AT90CAN64_AT90CAN128
2017-09-21 13:17:4719 基于C8051F040單片機(jī)的CAN總線通信硬件部分 硬件部分電路結(jié)構(gòu)如下: CAN收發(fā)模塊原本采用的是ATA6660高速CAN收發(fā)芯片,電路連接如下: 設(shè)計(jì)電路為:當(dāng)單片機(jī)發(fā)送數(shù)據(jù)時(shí),D18閃爍
2017-11-24 05:11:011056 內(nèi)部集成CAN控制器。由于第二種設(shè)計(jì)方法所用的器件少,電路關(guān)系簡(jiǎn)單,已得到廣泛應(yīng)用。本文重點(diǎn)分析AVR系列單片機(jī)內(nèi)部集成的CAN控制器及其應(yīng)用方法。 AT90CAN集成CAN總線控制器分析 AVR內(nèi)部集成CAN控制器的芯片主要包括AT90CAN32/64/128三種單片機(jī),它們之間的主要區(qū)別是
2017-11-29 10:30:102 CAN通信最早應(yīng)用于汽車領(lǐng)域,隨著科技的發(fā)展,目前CAN通信在計(jì)算機(jī)控制系統(tǒng)中已經(jīng)得到了廣泛的應(yīng)用,本文通過嵌入式WinCE與多塊LPC935單片機(jī)底板CAN通信研究開發(fā),綜合了嵌入式、單片機(jī)及網(wǎng)絡(luò)通信技術(shù)實(shí)現(xiàn)了多路CAN通信,達(dá)到了最初的設(shè)計(jì)目的。
2018-03-23 13:58:00889 
總線,在通訊上也會(huì)受到部分干擾,所以改造CAN總線迫在眉睫。本文首先介紹了什么是光纖及can總線,其次介紹了為什么要用光纖CAN轉(zhuǎn)換器,最后闡述了基于光纖轉(zhuǎn)CAN模塊的CAN總線通信改造步驟詳解。
2018-05-07 17:09:357545 MCP25l0是Microchip公司生產(chǎn)的一種獨(dú)立的可編程CAN控制器芯片。本文將介紹新型的獨(dú)立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點(diǎn)中的應(yīng)用實(shí)例。
2019-09-26 08:01:002804 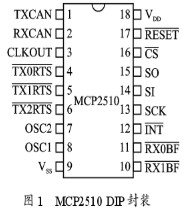
基于對(duì)MVB和CAN通信協(xié)議的深入分析,從而實(shí)現(xiàn)一種MVB—CAN的網(wǎng)關(guān)設(shè)
計(jì),有效地完成了兩種協(xié)議之間的數(shù)據(jù)通信。本文著重討論了MVB-CAN網(wǎng)關(guān)系統(tǒng)
設(shè)計(jì)的三大部分:硬件設(shè)計(jì)框圖、軟件
2018-10-11 08:00:0043 GCAN-601模塊是嵌入式單片機(jī)UART串口轉(zhuǎn)CAN模塊,可實(shí)現(xiàn)將UART串行數(shù)據(jù)與CAN數(shù)據(jù)之間相互轉(zhuǎn)換。搭載GCAN-601模塊,用戶無需精通單片機(jī)CAN總線編程,只需使用UART串行接口即可擴(kuò)展出CAN總線,從而快速接入CAN總線網(wǎng)絡(luò)。
2018-10-31 16:00:0619687 產(chǎn)品名稱:CAN模塊
產(chǎn)品型號(hào):FIT-CAN-II_2515
產(chǎn)品接口:SPI
產(chǎn)品功能:
此模塊可將開發(fā)板上SPI接口轉(zhuǎn)換為CAN總線接口
2019-11-28 09:01:362077 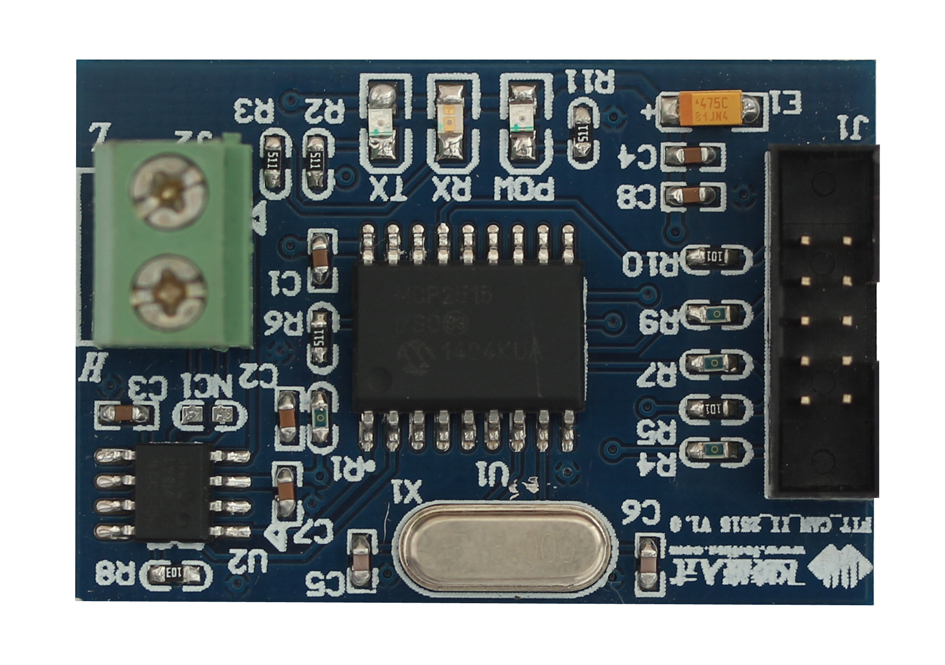
NEC是僅次于Freescale的世界第二大車用單片機(jī)制造商,由于其在中國推廣的比較晚,國內(nèi)企業(yè)使用得并不多。CAN總線模塊是μPD780822型單片機(jī)的一個(gè)外設(shè),是一個(gè)完整的CAN控制器。可滿足
2020-04-13 09:37:02819 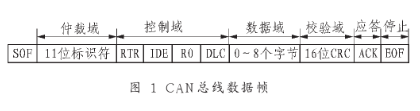
,但其通信方式實(shí)質(zhì)上仍是“主從式”。本文介紹了一種基于CAN控制器的單片機(jī)多機(jī)系統(tǒng),從本質(zhì)上實(shí)現(xiàn)了任意兩機(jī)之間直接相互通信,從而克服了“主從式”多機(jī)通信的缺點(diǎn)。
2020-06-26 17:57:002074 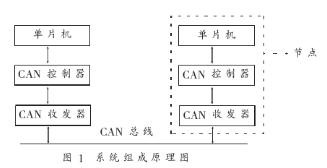
單片機(jī)編程軟件的使用為單片機(jī)的使用提供了便捷,對(duì)于單片機(jī)編程軟件,小編在往期文章中有諸多介紹。為增加大家對(duì)單片機(jī)編程軟件的了解,本文將對(duì)keil單片機(jī)編程軟件予以介紹,主要在于介紹該單片機(jī)編程軟件的模式設(shè)置和一些編程事項(xiàng)。如果你對(duì)本文內(nèi)容具有興趣,不妨繼續(xù)往下閱讀哦。
2020-08-15 10:51:334313 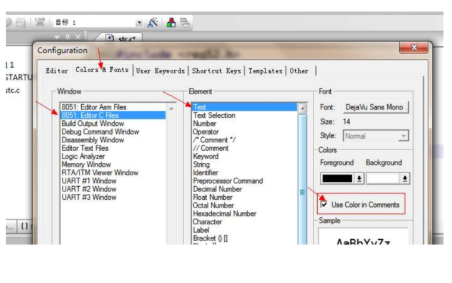
本文檔的主要內(nèi)容詳細(xì)介紹的是UART通信轉(zhuǎn)CAN通信配置軟件。
2021-03-01 08:00:0035 文章介紹了CAN總線通信協(xié)議和Motorola新一代嵌入式控制器DSP56F805內(nèi)置的用于實(shí)現(xiàn)CAN通信的MSCAN模塊,并通過編程實(shí)例說明了MSCAN模塊的應(yīng)用方法,最后介紹了研華公司生產(chǎn)的CAN總線通信卡PCL841的使用方法。
2021-03-15 16:24:2714 CAN是一個(gè)系統(tǒng),應(yīng)用在了汽車上(不限于),由≥2個(gè)模塊組成,俗稱拓譜網(wǎng)絡(luò);模塊的核心是單片機(jī)、電腦,在軟件的架構(gòu)中,具有CAN協(xié)議通訊功能。
2021-04-20 09:46:307 STC89C52調(diào)試can總線-SJA1000記錄(代碼都測(cè)試過)can通信模塊51單片機(jī)系統(tǒng)板最小系統(tǒng)板另外一些需要注意點(diǎn)最近調(diào)試51單片機(jī)的can總線,網(wǎng)上的資料相對(duì)而言實(shí)在是比較少,在調(diào)試
2021-11-11 10:36:0663 一、CAN模塊介紹 這個(gè)實(shí)驗(yàn)我們來研究XEP100單片機(jī)內(nèi)部的CAN模塊。 XEP100單片機(jī)的CAN的基本特性如下:? 實(shí)施CAN協(xié)議—2.0A/B版— 標(biāo)準(zhǔn)和擴(kuò)展數(shù)據(jù)幀— 0-8字節(jié)數(shù)
2021-11-18 13:06:044 APM32F103RCT6_CAN_CAN通信丟包
2022-11-09 21:04:031 點(diǎn)擊上方 藍(lán)字 關(guān)注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機(jī)和外圍擴(kuò)展芯片, 給出了CAN 總線通信節(jié)點(diǎn)的詳細(xì)設(shè)計(jì)方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設(shè)計(jì)實(shí)現(xiàn)通信
2023-06-18 11:15:011796 當(dāng)出現(xiàn)CAN L 與CAN H 導(dǎo)線互相接反這種故障時(shí),一般情況下,接錯(cuò)的那個(gè)控制模塊將無法通信,其他控制模塊的通信則正常。CAN L 與CAN H導(dǎo)線互相接反的示意圖如下圖所示。 在懷疑
2023-09-14 16:59:592183 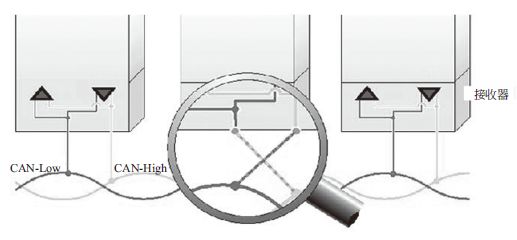
STM8單片機(jī)CAN濾波器的設(shè)置
2023-10-17 14:50:22946 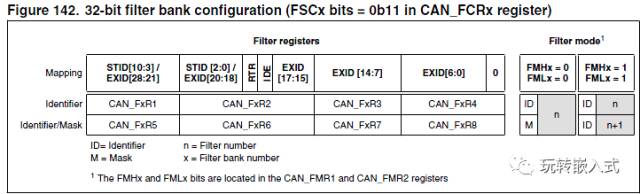
CAN協(xié)議棧 汽車CAN協(xié)議棧是一種軟件組件,用于實(shí)現(xiàn)汽車電子系統(tǒng)中的CAN總線通信功能。它包含了一系列的功能軟件,用于處理CAN總線的物理層和數(shù)據(jù)鏈路層的通信協(xié)議。 汽車CAN協(xié)議棧的功能軟件主要
2023-10-27 16:16:541516 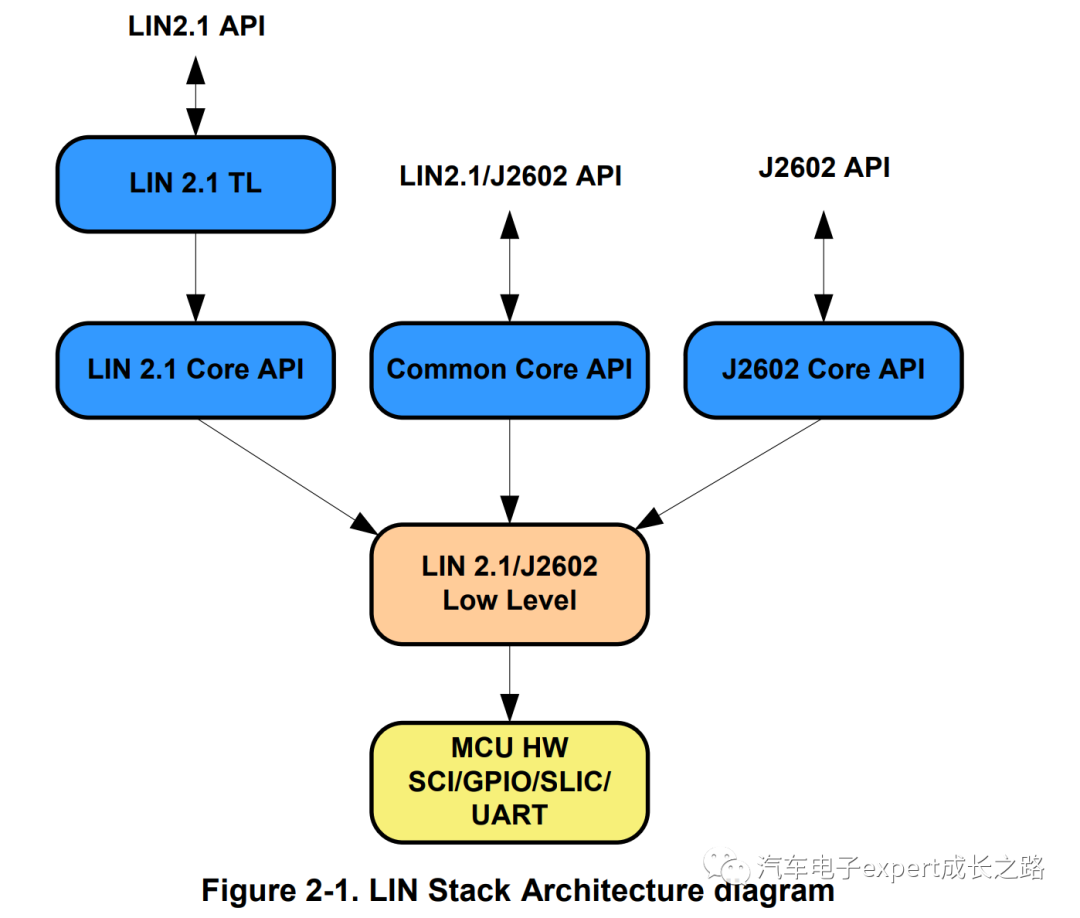
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論