 電子發(fā)燒友App
電子發(fā)燒友App


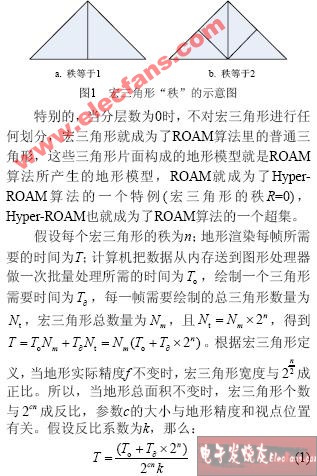
宏三角形
目前的多分辨率算法(LOD)大多采用三角形作為最小的渲染圖元,綜合該算法的主要思想,使用一種更加復(fù)雜的圖元:以“宏三角形”為最小渲染單位。相應(yīng)地,本文把以宏三角形作為最小渲染單位的ROAM算法稱為Hyper-ROAM算法。
使用宏三角形的優(yōu)點(diǎn)是使繪制地形模型的每一個(gè)三角形的工作量大大減少,而且能得到更高的渲染效率。也就是說(shuō),該方法是基于地形模型的“粒度”從三角形變?yōu)閮?nèi)部包含多個(gè)三角形的“宏三角形”。渲染時(shí),將宏三角形作為最小渲染單位,每次將其內(nèi)部的一批三角形一起送入圖形卡進(jìn)行繪制。在宏三角形內(nèi)部,采用規(guī)則的三角形網(wǎng)格,對(duì)其進(jìn)行細(xì)分。本文定義宏三角形“秩”的概念,秩R=n時(shí),宏三角形被劃分為2n個(gè)三角形。
因此就證明了n=0時(shí)ROAM算法并非是Hyper-ROAM算法所有特例中效率最高的一種。通過(guò)調(diào)整n的值,就能夠找到最短的地形渲染時(shí)間T,加快渲染速度。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論