 電子發(fā)燒友App
電子發(fā)燒友App


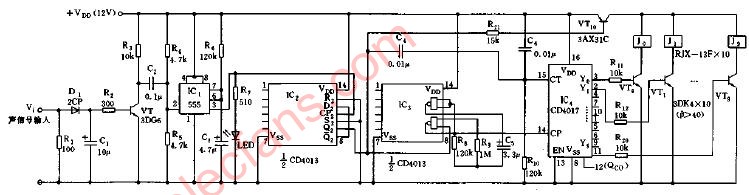
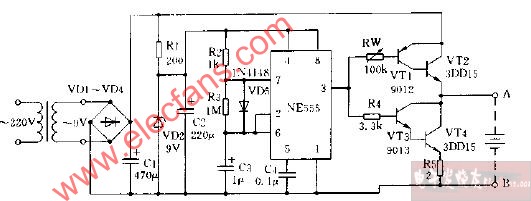
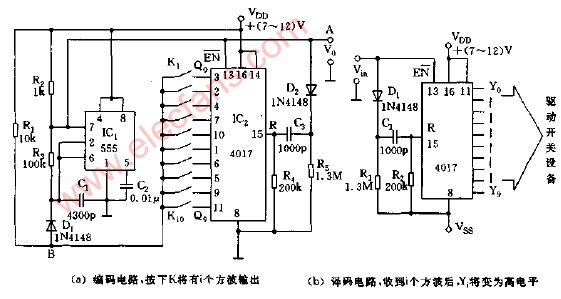
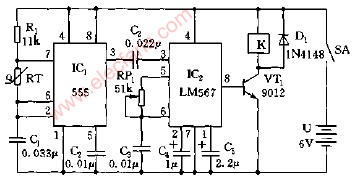
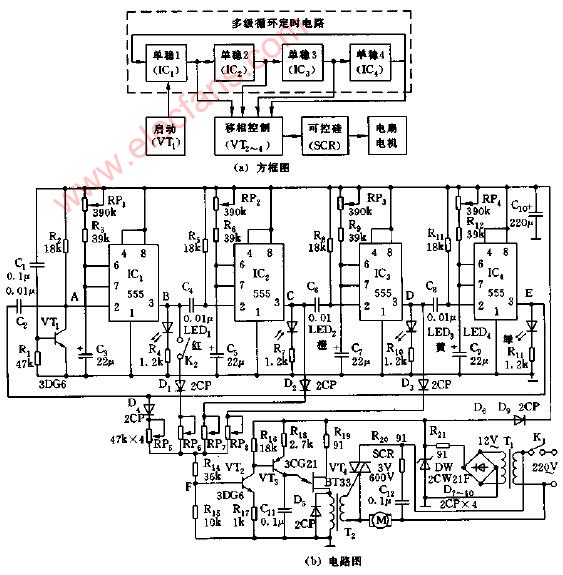
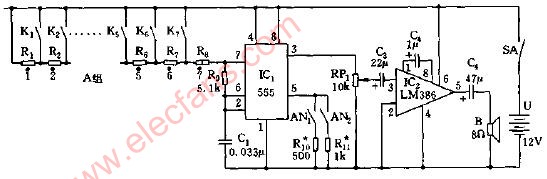
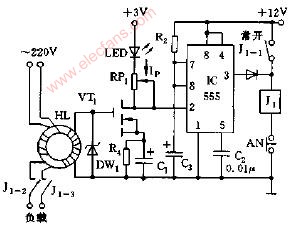
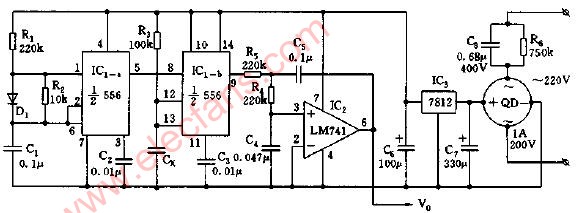
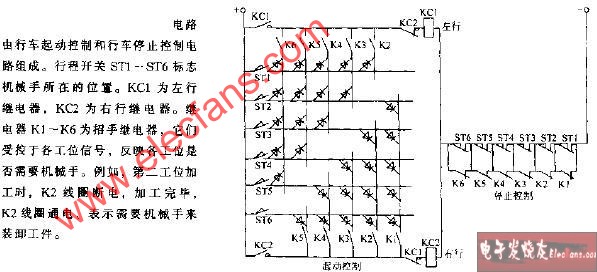
工業(yè)機械手簡易程控電路圖
- 電路圖(495405)


相關推薦
PLC經典實例:簡易機械手的PLC控制線路與程序詳解
,SQ3為上到位檢測開關,SQ4為下到位檢測開關,SQ5為工件檢測開關。 圖5-9 簡易機械手的結構 簡易機械手控制要求如下: ①機械手要將工件從工位A移到工位B處。 ②機械手的初始狀態(tài)(原點條件)是機械手應停在工位A的上方,SQI、SQ3均閉合。 ③若原點條件
2022-12-05 13:47:00 17716
17716
17716工業(yè)機械手設計基礎PDF電子書免費下載
工業(yè)機械手是近十幾年來出現的一種技術裝備,它能模仿人體上肢某些動作,在生產過程中代替人搬運物件或操持工具進行操作。在工業(yè)生產中應用機械手,可以提高勞動生產率、保證產品質量,減輕工人勞動強度,實現
2019-12-25 08:00:00 74
74
74基于PLC的四軸聯動簡易機械手控制系統(tǒng)
一四軸聯動簡易機械手的結構及動作過程 ??? 機械手結構如下圖1所示,有氣控機械手(1)、XY軸絲杠組(2)、轉盤機構(3)、旋轉基座(4)等組成。
2010-08-02 18:17:315199
5199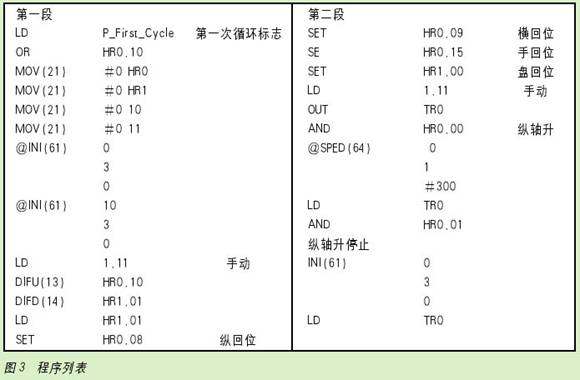
計算機-PLC在機械手遠程控制系統(tǒng)中的應用
本文針對機械手的遠程控制問題,選用三菱FX2N 系列PLC 作為控制器,以計算機為主站,實現了機械手的可視化遠程控制。文中介紹了控制系統(tǒng)的組成,闡述了控制系統(tǒng)的設計方法。
2009-08-31 09:11:1640
40
計算機遠程控制在可移動機械手中的應用
闡述了計算機遠程控制移動取物機械手的結構與實現過程,提出了其遠程控制系統(tǒng)的體系結構及硬件構成。給出了實現機械手遠程控制的具體解決方案。關鍵詞:并行通訊口 遠程
2009-07-08 08:27:0324
24
PLC控制機械手設計
PLC機械手控制的實現二、設計要求:1. 闡述機械手的工作原理2. 如何實現PLC對機械手的控制3. 機械手控制程序設計第一節(jié) 機械手的工作原理1.1 機
2008-12-13 14:15:22365
365






 工商網監(jiān)
工商網監(jiān)
評論