基于深度學(xué)習(xí)的增強(qiáng)版ORB-SLAM3詳解
ORB-SLAM3雖是當(dāng)前最先進(jìn)的SLAM之一,但由于使用傳統(tǒng)的ORB(定向FAST和旋轉(zhuǎn)BRIEF....

一種適用于動態(tài)環(huán)境的實(shí)時RGB-D SLAM系統(tǒng)
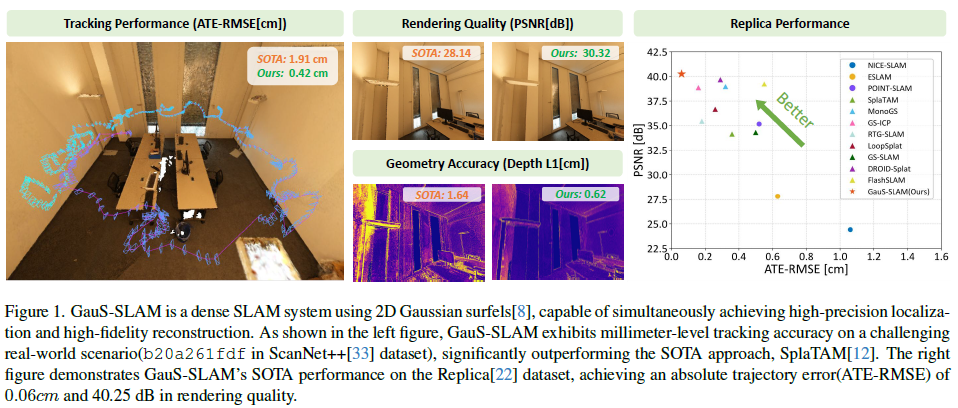
近期用于視覺SLAM的3D高斯?jié)姙R(3DGS)技術(shù)在跟蹤和高保真建圖方面取得了顯著進(jìn)展。然而,其順序....

一種適用于動態(tài)環(huán)境的3DGS-SLAM系統(tǒng)
當(dāng)前基于神經(jīng)輻射場(NeRF)或3D高斯?jié)姙R(3DGS)的SLAM方法在重建靜態(tài)3D場景方面表現(xiàn)出色....

三維高斯?jié)姙R大規(guī)模視覺SLAM系統(tǒng)解析
近期興起的神經(jīng)輻射場(NeRF)與三維高斯?jié)姙R(3DGS)技術(shù)在視覺SLAM中展現(xiàn)出令人鼓舞的突破性....

一種新型激光雷達(dá)慣性視覺里程計(jì)系統(tǒng)介紹
針對具有挑戰(zhàn)性的光照條件和惡劣環(huán)境,本文提出了LIR-LIVO,這是一種輕量級且穩(wěn)健的激光雷達(dá)-慣性....

一種實(shí)時多線程VSLAM框架vS-Graphs介紹
針對現(xiàn)有VSLAM系統(tǒng)語義表達(dá)不足、地圖可解釋性差的問題,本文提出vS-Graphs,一種實(shí)時多線程....

INDEMIND三維語義建圖技術(shù)讓機(jī)器人看懂立體世界
當(dāng)行業(yè)還在為機(jī)械臂拖布、自動上下水等清潔模塊不斷狂卷時,掃地機(jī)器人正站在智能化躍遷的十字路口。這場從....
TCL攜手INDEMIND重新定義家庭AI交互邊界
繼CES 2025首秀引發(fā)全球關(guān)注后,全球首款分體式AI陪伴機(jī)器人TCL Ai Me再次登陸AWE ....
一種基于點(diǎn)、線和消失點(diǎn)特征的單目SLAM系統(tǒng)設(shè)計(jì)
本文提出了一種穩(wěn)健的單目視覺SLAM系統(tǒng),該系統(tǒng)同時利用點(diǎn)、線和消失點(diǎn)特征來進(jìn)行精確的相機(jī)位姿估計(jì)和....

掃地機(jī)器人市場的破局之路
消費(fèi)者對兼顧高性能與低價(jià)格的訴求不斷升級,倒逼行業(yè)加速技術(shù)普惠。

如何讓陪伴機(jī)器人更懂家庭
隨著ChatGPT等AI的出現(xiàn),《her》似乎不再是科幻。大家開始探索AI陪聊、AI心理咨詢,甚至是....
INDEMIND助力打造世界首款分體式陪伴機(jī)器人
近日,一年一度的“科技春晚”CES 2025正式拉開帷幕。作為展示最新技術(shù)成果和創(chuàng)新產(chǎn)品的關(guān)鍵平臺,....
一種基于MASt3R的實(shí)時稠密SLAM系統(tǒng)
本文提出了一種即插即用的單目SLAM系統(tǒng),能夠在15FPS的幀率下生成全局一致的位姿和稠密幾何圖形。....
INDEMIND創(chuàng)新視覺技術(shù)助力機(jī)器人清潔模式革新
自掃拖功能的上線,掃地機(jī)器人在清潔系統(tǒng)上的死磕便從未停止。然而,隨著各類創(chuàng)新技術(shù)越加越多,掃地機(jī)器人....
用于任意排列多相機(jī)的通用視覺里程計(jì)系統(tǒng)
如何讓多相機(jī)視覺SLAM系統(tǒng)更易于部署且對環(huán)境更具魯棒性?本文提出了一種適用于任意排列多相機(jī)的通用視....

一種降低VIO/VSLAM系統(tǒng)漂移的新方法
本文提出了一種新方法,通過使用點(diǎn)到平面匹配將VIO/VSLAM系統(tǒng)生成的稀疏3D點(diǎn)云與數(shù)字孿生體進(jìn)行....

用于SLAM中點(diǎn)云地圖綜合評估的開源框架
在SLAM中評估大規(guī)模的點(diǎn)云地圖仍頗具挑戰(zhàn),主要原因在于缺乏統(tǒng)一、穩(wěn)健且高效的評估框架。本文提出了M....
INDEMIND立體視覺技術(shù)讓機(jī)器人落地更穩(wěn)
即便服務(wù)機(jī)器人經(jīng)歷市場降溫,行業(yè)內(nèi)卷,玩家們卻依然趨之若鶩,紛紛入局,背后到底有什么魔力?
Transformer是機(jī)器人技術(shù)的基礎(chǔ)嗎
生成式預(yù)訓(xùn)練Transformer(GPT)被吹捧為將徹底改變機(jī)器人技術(shù)。但實(shí)際應(yīng)用中,GPT需要龐....

利用VLM和MLLMs實(shí)現(xiàn)SLAM語義增強(qiáng)
語義同步定位與建圖(SLAM)系統(tǒng)在對鄰近的語義相似物體進(jìn)行建圖時面臨困境,特別是在復(fù)雜的室內(nèi)環(huán)境中....

開發(fā)小型機(jī)器人面臨哪些難題
盡管不同商用場景的大多區(qū)域都十分相似,但非標(biāo)準(zhǔn)化的場景屬性無法避免的導(dǎo)致了不少corner case....
基于視覺語言模型的導(dǎo)航框架VLMnav
本文提出了一種將視覺語言模型(VLM)轉(zhuǎn)換為端到端導(dǎo)航策略的具體框架。不依賴于感知、規(guī)劃和控制之間的....
INDEMIND視覺導(dǎo)航技術(shù)賦能機(jī)器人行業(yè)
在追求松弛感的路上,每個人的方式或許各有不同,但相同的是,我們會不約而同的先為生活減負(fù)。
INDEMIND為具身智能量身打造通用性視覺感知技術(shù)
隨著大模型的蓬勃發(fā)展以及硬件技術(shù)的持續(xù)迭代,具身智能作為人工智能的關(guān)鍵分支,正逐漸成為全球范圍內(nèi)的新....
INDEMIND掃地機(jī)器人的核心技術(shù)
掃地機(jī)器人內(nèi)卷的終點(diǎn)是技術(shù)和價(jià)值,價(jià)格只是附屬品。
INDEMIND:機(jī)器人產(chǎn)業(yè)鏈的“賣水人”
當(dāng)所有人開始掘金時,INDEMIND決定做一個賣鏟子的人。
一種完全分布式的點(diǎn)線協(xié)同視覺慣性導(dǎo)航系統(tǒng)
在本文中,我們提出了一種完全分布式的點(diǎn)線協(xié)同視覺慣性導(dǎo)航系統(tǒng)。我們通過蒙特卡羅模擬和真實(shí)環(huán)境數(shù)據(jù)集,....

一種半動態(tài)環(huán)境中的定位方法
在非靜態(tài)環(huán)境中進(jìn)行地圖繪制和定位是機(jī)器人學(xué)的基本問題。之前的方法大多關(guān)注靜態(tài)和高度動態(tài)的物體,但在半....






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)