") 用于黑暗中視覺自我運(yùn)動(dòng)估計(jì)的新型主動(dòng)照明框架
用于黑暗中視覺自我運(yùn)動(dòng)估計(jì)的新型主動(dòng)照明框架
本文提出一種新型主動(dòng)照明框架,通過動(dòng)態(tài)控制可移動(dòng)光源主動(dòng)照亮高紋理區(qū)域,顯著提升VO與VSLAM算法在極端光照條件下的性能。在真實(shí)機(jī)器人平臺(tái)上進(jìn)行的實(shí)驗(yàn)表明,相比傳統(tǒng)固定照明方法,本文方法可將姿態(tài)估計(jì)誤差最高降低75%。
? 文章:
Active Illumination for Visual Ego-Motion Estimation in the Dark
? 作者:
Francesco Crocetti, Alberto Dionigi, Raffaele Brilli, Gabriele Costante, Paolo Valigi
? 論文鏈接:
https://arxiv.org/abs/2502.13708
? 編譯:
INDEMIND
01 本文核心內(nèi)容
基于視覺的位姿估計(jì)是實(shí)現(xiàn)移動(dòng)機(jī)器人定位最廣泛采用的策略之一。過去幾十年間,多種高效的VO(視覺里程計(jì))和VSLAM方法不斷涌現(xiàn),而近期視覺-慣性融合技術(shù)的出現(xiàn)更是展現(xiàn)了卓越性能。
VO和VSLAM解決方案的有效性依賴于提魯棒且高區(qū)分性視覺特征的能力。這些特征可以是稀疏的、密集的,甚至是基于學(xué)習(xí)的。大多數(shù)前沿研究假設(shè)視覺估計(jì)系統(tǒng)的運(yùn)行條件接近理想狀態(tài),即場(chǎng)景紋理豐富且光照條件適宜。然而,即使特征提取與跟蹤模塊的性能輕微下降,也可能導(dǎo)致整個(gè)估計(jì)流程的失敗。盡管如此,許多應(yīng)用(如災(zāi)害救援或地下勘探)要求機(jī)器人平臺(tái)在遠(yuǎn)非理想的環(huán)境中運(yùn)行。尤其是低光照或完全黑暗的環(huán)境,對(duì)基于視覺的系統(tǒng)而言是最具挑戰(zhàn)性的場(chǎng)景,因?yàn)榇祟惌h(huán)境幾乎完全無法提取有效的視覺線索。
一種直接的解決方案是為機(jī)器人配備強(qiáng)力廣角光源以照亮相機(jī)捕獲的整個(gè)場(chǎng)景。然而,這種方法存在兩個(gè)顯著缺陷:(i)能效低下,電池能量被浪費(fèi)在照亮無紋理區(qū)域(如平坦表面);(ii)在大規(guī)模環(huán)境中,由于光線過度散射,光源功率可能不足以充分照亮整個(gè)場(chǎng)景。反之,采用固定式窄光束光源雖然能效更高,并可有效照亮場(chǎng)景的遠(yuǎn)距離部分以提升可見性,但由于大部分區(qū)域仍處于未照明狀態(tài),特征跟蹤極易丟失。
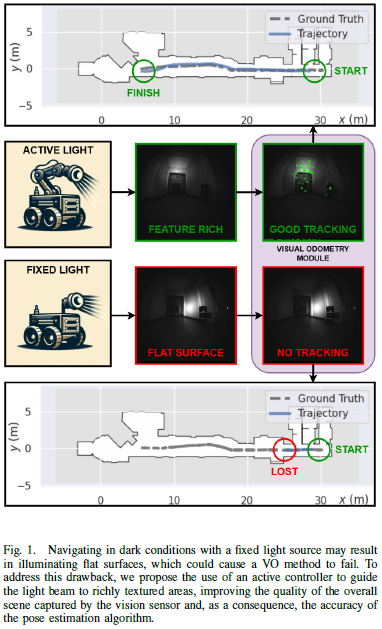
受上述挑戰(zhàn)的啟發(fā),本文提出了一種創(chuàng)新方法以推動(dòng)技術(shù)前沿。如圖1所示,我們?yōu)闄C(jī)器人配備搭載在機(jī)械臂上的窄光束光源,并開發(fā)了一種新方法用于識(shí)別場(chǎng)景中預(yù)期包含最顯著特征信息的區(qū)域。這使得我們能夠定義控制機(jī)械臂的設(shè)定點(diǎn),動(dòng)態(tài)調(diào)整光束方向。相機(jī)圖像以預(yù)定義頻率持續(xù)采樣,并通過基于深度學(xué)習(xí)的增強(qiáng)網(wǎng)絡(luò)進(jìn)行處理,生成增強(qiáng)圖像流。隨后,系統(tǒng)分析這些圖像以確定目標(biāo)區(qū)域,進(jìn)而驅(qū)動(dòng)搭載LED聚光末端執(zhí)行器的機(jī)械臂調(diào)整光束聚焦位置。
據(jù)我們所知,這是首個(gè)通過機(jī)械臂實(shí)現(xiàn)主動(dòng)光束自適應(yīng)調(diào)整以支持基于視覺的位姿估計(jì)的方法。
02 主要貢獻(xiàn)
動(dòng)態(tài)特征區(qū)域識(shí)別:設(shè)計(jì)低光環(huán)境下圖像高特征密度區(qū)域動(dòng)態(tài)檢測(cè)方法;
主動(dòng)光源控制:提出信息驅(qū)動(dòng)策略控制可移動(dòng)光源聚焦環(huán)境紋理豐富區(qū)域;
實(shí)驗(yàn)驗(yàn)證:構(gòu)建搭載可控光源的機(jī)器人平臺(tái),通過真實(shí)場(chǎng)景實(shí)驗(yàn)證明本方法顯著優(yōu)于現(xiàn)有技術(shù)。
03 方法架構(gòu)
在本研究中,我們考慮完全黑暗環(huán)境下的場(chǎng)景,以及配備帶有定向機(jī)械臂安裝光源的移動(dòng)機(jī)器人。所提出的主動(dòng)照明方法的目標(biāo)是為機(jī)器人平臺(tái)提供合適的光束方向控制策略,以通過VO或VSLAM算法獲得最佳的機(jī)器人位姿估計(jì)。
為此,我們?cè)O(shè)計(jì)了一種新型的低光條件下視覺定位框架。該框架利用圖像增強(qiáng)生成對(duì)抗網(wǎng)絡(luò)(GAN)來識(shí)別高特征密度區(qū)域,并結(jié)合一種新型主動(dòng)照明策略和機(jī)械臂控制器對(duì)這些區(qū)域進(jìn)行照明。
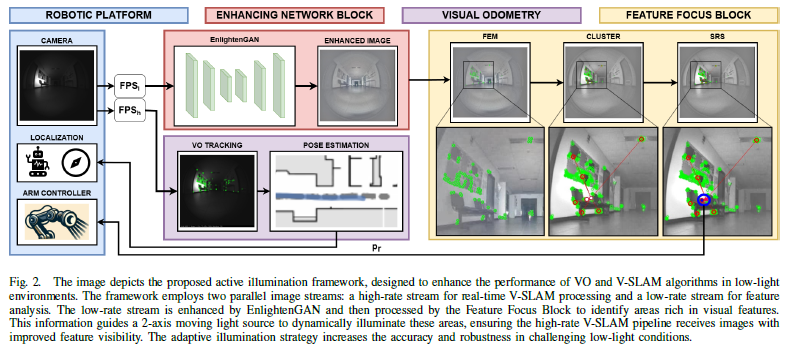
圖2所示的開發(fā)框架圍繞一個(gè)核心要素——雙軸移動(dòng)光源展開。該組件賦予機(jī)器人動(dòng)態(tài)調(diào)節(jié)環(huán)境光照的能力。該主動(dòng)照明系統(tǒng)是一款閉環(huán)控制裝置,能夠在暗環(huán)境中實(shí)現(xiàn)光束的動(dòng)態(tài)調(diào)控。在VSLAM算法持續(xù)追蹤特征點(diǎn)與描述符以進(jìn)行位姿估計(jì)的同時(shí),圖像流輸入至低幀率重采樣器,該設(shè)備輸出保持原始分辨率但幀率降低的圖像。該重采樣器作為并行于位姿估計(jì)流程的復(fù)合處理管道的入口,其處理鏈路由兩大核心模塊構(gòu)成:"增強(qiáng)網(wǎng)絡(luò)模塊(ENB)"與"特征聚焦模塊(FFB)",專門負(fù)責(zé)生成雙軸光束設(shè)備的控制參考信號(hào)。
04 結(jié)果
實(shí)驗(yàn)活動(dòng)的結(jié)果總結(jié)于表I。第一個(gè)重要發(fā)現(xiàn)是,在幾乎所有場(chǎng)景和定義的指標(biāo)下,主動(dòng)光源方法AL-VO均優(yōu)于固定光源方法FL-VO。具體而言,在走廊環(huán)境等挑戰(zhàn)性場(chǎng)景中,F(xiàn)L-VO持續(xù)失敗且無法完成軌跡。如圖4所示,這是由于FL-VO在導(dǎo)航過程中意外照射平坦表面,導(dǎo)致VO算法因紋理信息不足而失效。相反,得益于主動(dòng)光源策略,AL-VO能夠?qū)⒐馐匦露ㄏ蛑粮缓屈c(diǎn)、邊緣和物體的區(qū)域,從而完整跟蹤所有軌跡 。
。
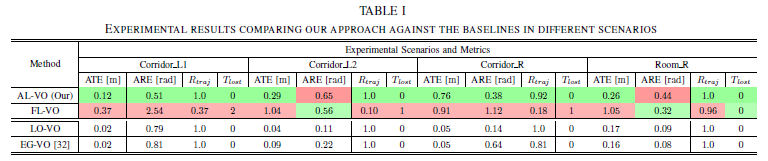
作為參考,我們還納入了VO算法在最佳光照條件(LO-VO)和低光條件下結(jié)合EnlightenGAN增強(qiáng)(EG-VO)的性能指標(biāo)。與預(yù)期一致,LO-VO和EG-VO取得了最佳整體表現(xiàn)。值得注意的是,EG-VO在黑暗條件下表現(xiàn)出色,結(jié)果與LO-VO(日光條件)非常接近。但需指出,盡管EnlightenGAN提供了卓越的圖像增強(qiáng)能力,其較高的計(jì)算復(fù)雜度限制了EG-VO在資源受限機(jī)器人平臺(tái)上的部署。因此,在此類場(chǎng)景中,AL-VO是低光VO的更優(yōu)選擇。
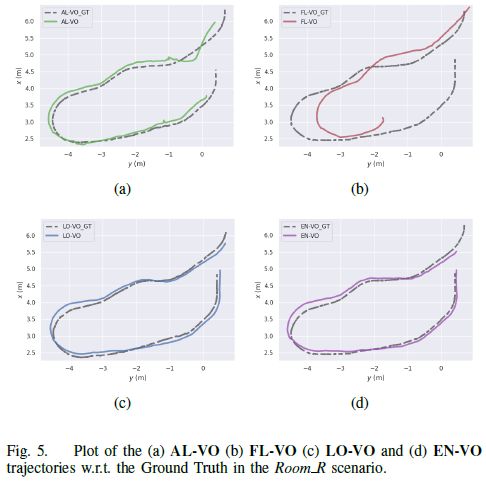
最后,如圖5的定性結(jié)果所示,所有方法在房間R場(chǎng)景中均能生成合理軌跡。然而,F(xiàn)L-VO在某一彎道區(qū)域顯著偏離真實(shí)軌跡(GT),而AL-VO能夠保持與GT軌跡的高度對(duì)齊,且得分接近LO-VO和EG-VO。
05 總結(jié)
在本研究中,我們提出了一種新型主動(dòng)照明框架,旨在使VO和VSLAM算法能夠在黑暗環(huán)境中正常運(yùn)行。具體而言,我們開發(fā)了一種創(chuàng)新性的主動(dòng)式方法,通過識(shí)別并優(yōu)先照亮圖像中特征點(diǎn)最密集的區(qū)域。大量真實(shí)環(huán)境實(shí)驗(yàn)驗(yàn)證了該方法的有效性,并凸顯了其實(shí)際應(yīng)用潛力。未來的工作將通過在目標(biāo)選擇指標(biāo)中引入額外參數(shù),將機(jī)器人未來運(yùn)動(dòng)軌跡納入考量,從而進(jìn)一步提升系統(tǒng)性能。
-
機(jī)器人
+關(guān)注
關(guān)注
212文章
29421瀏覽量
211304 -
照明
+關(guān)注
關(guān)注
11文章
1549瀏覽量
132078 -
光源
+關(guān)注
關(guān)注
3文章
731瀏覽量
68413 -
VSLAM
+關(guān)注
關(guān)注
0文章
25瀏覽量
4475
原文標(biāo)題:誤差降低75%!首個(gè)面向黑暗環(huán)境下視覺自運(yùn)動(dòng)估計(jì)的主動(dòng)照明技術(shù)!
文章出處:【微信號(hào):gh_c87a2bc99401,微信公眾號(hào):INDEMIND】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
半導(dǎo)體產(chǎn)業(yè)展望-黑暗中等待黎明到來
科天健:機(jī)器視覺照明要點(diǎn)
嵌入式主動(dòng)視覺系統(tǒng)如何實(shí)現(xiàn)?
基于DSP的嵌入式通用主動(dòng)視覺系統(tǒng)該怎么設(shè)計(jì)?
惠州機(jī)器視覺光源常見的幾種照明方式
一種新型全搜索運(yùn)動(dòng)估計(jì)IP核設(shè)計(jì)
什么是運(yùn)動(dòng)估計(jì)
英特爾推出黑暗中快速成像的系統(tǒng),效果不錯(cuò)

游戲中視覺風(fēng)格的歷史和現(xiàn)狀
美科學(xué)家研制新型相機(jī)可黑暗中拍3D照片
計(jì)算機(jī)視覺概論完成主成分分析和分類開始運(yùn)動(dòng)估計(jì)
計(jì)算機(jī)視覺方向簡(jiǎn)介之視覺慣性里程計(jì)

計(jì)算機(jī)視覺方向簡(jiǎn)介

華裔女博士提出:Facebook提出用于超參數(shù)調(diào)整的自我監(jiān)督學(xué)習(xí)框架
發(fā)光的樂器在黑暗中會(huì)是什么樣子






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論