基于YOLOv5的視頻計(jì)數(shù) — 汽車計(jì)數(shù)實(shí)現(xiàn)
最后,我們將繪制一個(gè)多邊形,該多邊形將是計(jì)數(shù)對(duì)象的參考,也就是說(shuō),如果對(duì)象的參考點(diǎn)在多邊形內(nèi),我們將....

為什么需要分割?U-Net能提供什么?U-Net和自編碼器的區(qū)別
U-Net是一種卷積神經(jīng)網(wǎng)絡(luò)(CNN)方法,由Olaf Ronneberger、Phillip Fi....

阿秒科普說(shuō)——拍攝“光”的超級(jí)照相機(jī)
相對(duì)于宏觀物體來(lái)說(shuō),微觀世界的物質(zhì)(原子、分子)運(yùn)動(dòng)的速度更快,為了研究這種運(yùn)動(dòng),科學(xué)家們發(fā)明了飛秒....

計(jì)算機(jī)視覺(jué)中的立體視覺(jué)和深度感知Python示例實(shí)現(xiàn)
在人工智能和圖像處理的迷人世界中,這些概念在使機(jī)器能夠像我們的眼睛一樣感知我們周圍的三維世界中起著關(guān)....
工業(yè)缺陷檢測(cè)在標(biāo)注數(shù)據(jù)時(shí)需要注意的幾個(gè)事項(xiàng)
在工業(yè)場(chǎng)景中,網(wǎng)絡(luò)結(jié)構(gòu)決定了下限,數(shù)據(jù)決定著上限,要想模型有好的表現(xiàn),數(shù)據(jù)是至關(guān)重要的。

關(guān)于利用傳統(tǒng)圖像處理方法瑕疵檢測(cè)總結(jié)
最近做圖像處理與識(shí)別相關(guān)的事情,先從OpenCV/Matlab入手,看傳統(tǒng)算法在瑕疵檢測(cè)方向能做到什....
深度學(xué)習(xí)之后為何陷入了困境?
簡(jiǎn)而言之,gcForest(多粒度級(jí)聯(lián)森林)是一種決策樹(shù)集合方法,其中保留了深網(wǎng)的級(jí)聯(lián)結(jié)構(gòu),但不透明....

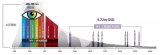
短波紅外光譜長(zhǎng)啥樣?短波紅外的要優(yōu)點(diǎn)和應(yīng)用
短波紅外波段指波長(zhǎng)在 1400-3000 納米之間的波段,肉眼無(wú)法識(shí)別這些光譜。礦物質(zhì)、人造物質(zhì)及其....
一文讀懂機(jī)器學(xué)習(xí):基本概念、五大流派與九種常見(jiàn)算法
軟件工程師編寫程序來(lái)解決問(wèn)題。首先存在一些數(shù)據(jù)→為了解決一個(gè)問(wèn)題,軟件工程師編寫一個(gè)流程來(lái)告訴機(jī)器應(yīng)....
2023十大科技趨勢(shì)之一:計(jì)算光學(xué)成像
計(jì)算光學(xué)成像是一個(gè)新興多學(xué)科交叉領(lǐng)域。它以具體應(yīng)用任務(wù)為準(zhǔn)則,通過(guò)多維度獲取或編碼光場(chǎng)信息(如角度、....

自動(dòng)駕駛環(huán)境感知——激光雷達(dá)物體檢測(cè)(chapter4)
激光雷達(dá)不僅可以做到多視圖融合,還能進(jìn)行多傳感器融合(此時(shí)是一個(gè)狀態(tài)估計(jì)問(wèn)題,將不同傳感器的感知結(jié)果....

基于計(jì)算機(jī)視覺(jué)的食品干燥智能監(jiān)控系統(tǒng)——胡蘿卜片的研究
CV系統(tǒng)作為智能MCS (SMCS)的組成部分在干燥機(jī)中使用,可以實(shí)現(xiàn)實(shí)時(shí)數(shù)據(jù)測(cè)量和隨后的基于模型的....

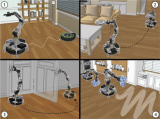
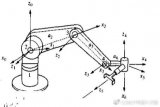
掃地機(jī)器人加裝了六軸機(jī)械臂!
該系統(tǒng)可以實(shí)現(xiàn)機(jī)械手與現(xiàn)有的掃地機(jī)器人無(wú)縫集成,只需對(duì)真空機(jī)器人進(jìn)行較少的改動(dòng)即可輕松連接和拆卸機(jī)械....
3.GraphSAGE[9]:generalized aggregation方法
歸納學(xué)習(xí)(Inductive Learning):先從訓(xùn)練樣本中學(xué)習(xí)到一定的模式,然后利用其對(duì)測(cè)試樣....
![3.GraphSAGE[9]:generalized aggregation方法](https://file1.elecfans.com/web2/M00/B0/56/wKgZomVVgO-AYsvqAAAMesNI54M965.jpg)
傳統(tǒng)基于幀的圖像傳感器輸出和基于事件的視覺(jué)傳感器輸出對(duì)比
2021年,索尼半導(dǎo)體解決方案公司(Sony Semiconductor Solutions Cor....

貝葉斯優(yōu)化是干什么的(原理解讀)
由于我們要優(yōu)化的這個(gè)函數(shù)計(jì)算量太大,一個(gè)自然的想法就是用一個(gè)簡(jiǎn)單點(diǎn)的模型來(lái)近似f(x),這個(gè)替代原始....


圖像增強(qiáng)三大類別介紹
圖像增強(qiáng)是圖像模式識(shí)別中非常重要的圖像預(yù)處理過(guò)程。圖像增強(qiáng)的目的是通過(guò)對(duì)圖像中的信息進(jìn)行處理,使得有....
目前幾種主流的機(jī)器人智能抓取系統(tǒng)方案
機(jī)器人學(xué)習(xí)中的經(jīng)典問(wèn)題之一便是分揀:在一堆無(wú)序擺放的物品堆中,取出目標(biāo)物品。
利用邊緣檢測(cè)計(jì)算物體面積
在農(nóng)業(yè)中,通常希望獲取不同土地的面積。雖然獲取這些土地的面積操作相對(duì)容易,但是卻涉及高額的費(fèi)用。另外....
工業(yè)視覺(jué)缺陷檢測(cè)的算法總結(jié)
缺陷檢測(cè)是工業(yè)視覺(jué)領(lǐng)域非常重要的應(yīng)用之一。幾乎所有的工業(yè)產(chǎn)品在流入市場(chǎng)之前都會(huì)有缺陷檢測(cè)的環(huán)節(jié),目的....
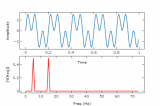
使用傅里葉變換進(jìn)行圖像邊緣檢測(cè)
簡(jiǎn)單來(lái)說(shuō),傅里葉變換是將輸入的信號(hào)分解成指定樣式的構(gòu)造塊。例如,首先通過(guò)疊加具有不同頻率的兩個(gè)或更多....
工業(yè)相機(jī)芯片開(kāi)窗的不同模式對(duì)比
隨著工業(yè)相機(jī)的普及,大家對(duì)芯片AOI技術(shù)的認(rèn)識(shí)也越來(lái)越深刻,可是仍然有很多人弄不清楚,本文即旨在幫助....

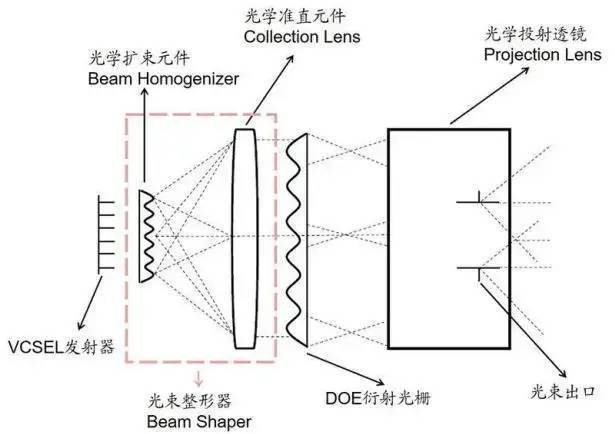
3D結(jié)構(gòu)光內(nèi)部硬件拆解
無(wú)論是結(jié)構(gòu)光、TOF還是雙目立體成像方案,主要的硬件包括紅外光發(fā)射器、紅外光攝像頭、可見(jiàn)光攝像頭和圖....
機(jī)器視覺(jué)里的光學(xué)知識(shí)科普
視場(chǎng)(FOV)也稱視野,是指能被視覺(jué)系統(tǒng)觀察到的物方可視范圍。對(duì)于鏡頭而言,可觀察到的視場(chǎng)跟鏡頭放大....

據(jù)說(shuō)是史上較全的PLC選型總結(jié)
存儲(chǔ)器容量是可編程序控制器本身能提供的硬件存儲(chǔ)單元大小,程序容量是存儲(chǔ)器中用戶應(yīng)用項(xiàng)目使用的存儲(chǔ)單元....
16個(gè)OpenCV函數(shù)開(kāi)始你的計(jì)算機(jī)視覺(jué)之旅
快速瀏覽上圖。我們花了不到一秒鐘的時(shí)間發(fā)現(xiàn)其中有一只貓,一條狗和一條人的腿。對(duì)于機(jī)器,這種學(xué)習(xí)過(guò)程變....






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)