 你知道機器人的詳細資料嗎
你知道機器人的詳細資料嗎

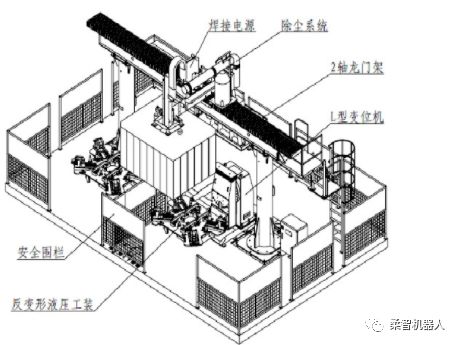
KUKA機器人焊接系統
主要包括
機器人系統
焊接系統
周邊設備
安全設備
其他附件組成
機器人系統包括機器人本體、機器人控制柜及示教盒組成。
機器人C4控制柜系統內部概覽
控制系統PC機5.驅動電源(軸7和8的
驅動調節器選項)6.4至6號軸驅動調|
節器7.1至3號軸驅動調節器8.制
動濾波器9.CCU 10.SIB/SIB擴展
型11.保險元件12.蓄電池13.|
接線面板14.滾輪安裝組件(選項)
19.庫卡smartPAD
1接線板11CSP
2蓄電池12控制系統PC機
3保險元件Q313制動濾波器K2
4保險元件Q1314驅動電源KPPG1
5總開關15驅動調節器KSP T1
6內部風扇16驅動調節器KSPT2
7驅動調節器KSPT12 17 SIB/SIB擴展型
8驅動調節器KSPT11 18CCU
關節坐標系
ROBROOT坐標系是一個笛卡爾坐標系,固定位于機器人足部。它可以根據世界坐標系說明機器人的位置。
在默認配置中,ROBROOT坐標系與世界坐標系是一致的。用$ROBROOT可以定義機器人相對于世界坐標系的移動。
機器人的運動方式
KUKA機器人有PTP(點到點)、LIN(直線)、CIRC(圓弧)、樣條運動四種基本的運動方式。
3.4.11)點至點(PTP)運動方
式
機器人沿最快的軌道將
TCP、TCP引至目標點。一般情
…一P2況下最快的軌道并不是最短P1.
的軌道,也就是說并非直線。因為機器人軸進行回轉運動,所以曲線軌道比直線軌道進行更快。無法事先知道精確的運動過程。
軌跡逼近
軌跡逼近的意思是:將不會精確移至程序編定的點。圓滑過渡是一個選項,可在進行運動編程時選擇。當在運動指令之后跟著一個觸發預進停止的指令時,無法進行圓滑過渡。
PTP運動時的軌跡逼近TCP離開可以準確到達
目標點的軌道,采用另一條更快的軌道。進行運動編程時將確定至目標點的距離,TCP最早允許在此距離處離·P2開其原有軌道。
當發生軌跡逼近的PTP運
P3動時,軌跡曲線不可預見。P1而且,滑過點在軌道的哪一
側經過也無法預測。
尋位的原理:
當運行尋位語句時,尋位功能打開,當焊絲碰到工件時,RDC內部繼電器線圈得電,其對應的常開閉合,快速測量通道導通,并機器人記錄當時的空間坐標。當焊絲用同樣運動參數去接觸第二、第三工件時,機器人會記錄第二、第三個工件的空間坐標,并且可以計算出實際位置相對于示教位置的偏移量,并補償偏移自動地變更機器人路徑,從而保證準確找到焊縫。
尋位注意事項
(1)保持工件表面清潔,不要有油污或油漆(2)保證干伸長一致
(3)正確設置向量的起始點和查找點的位置(4)將查找距離、尋找速度、返回速度設為合適的值(5)查找完、修正后要將向量關閉,注意賦值的對象和位置
(6)修改點位置時,注意點上是否帶有向量(7)使用聯動時,注意base的選用,雙工位時注意base號的選擇
(8)搜尋點和焊縫點必須保證是不變的相對位置關系
系統日常維護保養
一.日檢查及維護
1.送絲機構。包括送絲力距是否正常,送絲導管是否損壞,有無異常報警。
2.焊接過程中檢視導電嘴是否磨損過大,是否需要更換。
3.氣體流量是否正常。
4.檢查平衡吊拉力是否足夠。
5.水循環系統工作是否正常。
6.每班交接時通過cal-tcp程序檢查TCP精度。
7.每60分鐘手動清理噴嘴內部的焊渣。
-
機器人
+關注
關注
213文章
29784瀏覽量
213239
原文標題:工業機器人庫卡KUKA基礎知識及配件組成部分
文章出處:【微信號:faircs,微信公眾號:柔智機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
工業機器人的特點
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
什么是機器人?追蹤機器人技術的發展和未來
工業機器人4大控制方式,你知道幾種?






 工商網監
工商網監
評論