 深圳怡豐推出標準定制款“貔貅”叉車機器人 采用激光導航單舵輪驅動
深圳怡豐推出標準定制款“貔貅”叉車機器人 采用激光導航單舵輪驅動
叉車在企業的物流系統中扮演著非常重要的角色,是物料搬運設備中的主力軍,也是機械化裝卸、堆垛和運輸的高效率設備。目前,傳統叉車市場銷量每年數十萬臺,根據相關數據統計,僅2018年1~10月傳統叉車累計銷售超50萬臺。
隨著人工智能的飛速發展,AGV叉車以其高效率、低成本在搬運過程中完成客戶人性化和多樣化需求,已成為未來叉車智能化發展的主方向。然而,目前智能叉車AGV尚處于起步階段,未來應用和替代的市場空間巨大。根據新戰略機器人產業研究所統計,中國市場激光AGV叉車出貨量達到1500臺,銷售規模超過9億人民幣,已連續兩年出現45%以上的增長。
深圳怡豐機器人2019年度推出標準定制款“貔貅”叉車機器人,采用激光導航,單舵輪驅動,額定載重1.5T,舉升高度1.5m,可叉川字形托盤,最大直線速度1.5m/s,可滿足大部分生產需求。
圖1 怡豐機器人標準定制款“貔貅”叉車
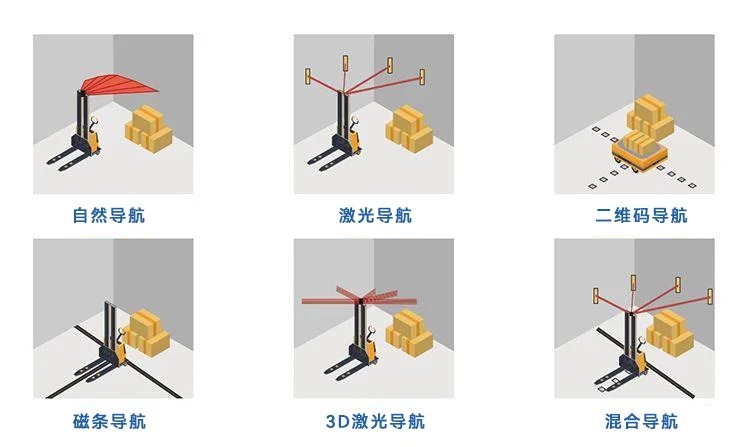
優化定位:激光導航與自然導航雙重選擇
怡豐機器人的激光導航AGV叉車均采用激光導航技術,分為激光導航和自然導航兩種。
激光導航需要布置反光板,激光定位掃描器的原理是利用激光的不發散性和準直性,發射的激光束遇到高反光性反射板后原路返回,實現光源無丟失接收,從而達到精確定位,一般來說它被安裝在AGV的頂部,具有抗干擾能力,(怡豐機器人的激光導航通過算法優化,可將激光定位掃描器安放到AGV的低位或者其他部位并保證了其抗干擾能力)。
從反光板相對AGV叉車的位置通過循環三邊定位算法計算確定當前AGV叉車的位置坐標和行駛方向,實現定位;
激光導航定位算法采用循環三邊定位算法,三邊定位的基本原理為:平面上有三個不共線的反光板 A,B,C,和一個未知終端 D(AGV叉車位置),并已測出三個反光板到終端D的距離分別為Ra,Rb,Rc,則以三個反光板坐標為圓心,三反光板到未知終端距離為半徑可以畫出三個相交的圓,如下圖2所示,未知節點坐標即為三圓相交點。
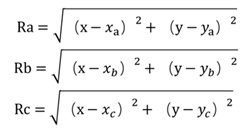
由最小二乘法得

圖2 三角定位原理圖
自然導航則是通過周邊墻面柱子等固定設施通過SLAM算法來計算AGV叉車位姿,實現定位,該方式定位精度高,對現場布置簡單,是復雜環境下理想的導航方式。
自然導航定位采用SLAM技術,SLAM(simultaneous localization and mapping)即同步定位與建圖,在初始時刻,激光雷達創建的地圖中并沒有任何的特征。當AGV叉車觀測到某特征m時,可以根據AGV叉車的位姿,以及特征在AGV叉車坐標系下的位姿,計算出特征在世界坐標系下的位姿,此時將特征加入到地圖中(更新地圖);當AGV叉車位姿改變,再次觀測到特征m,可以根據特征在世界坐標系下的位姿和特征在AGV叉車坐標系下的位姿,解算出當前AGV叉車的位姿。當AGV叉車連續運動時,它將觀測到更多的特征,根據同樣的方法。AGV叉車會把它們加入到地圖中,并且根據觀測到的信息更新AGV叉車的位姿以及它們的世界坐標。簡單的說,SLAM利用觀測到的特征計算它們的世界坐標以實現地圖創建,同時更新AGV叉車的位姿以實現AGV叉車的定位。 如下圖3為自然導航AGV所建地圖。

圖3 SLAM建圖
激光導航的優勢
激光導航相較于其他導航方式(如二維碼導航、磁條導航等),無需在地面鋪設定位設施,后期場地維護方便、費用低。AGV定位精度高(±5mm),行駛路徑可靈活多變,能夠適合多種復雜的現場環境,應用范圍廣,可以實現機臺到機臺、機臺到地面、地面到地面、以及疊放托盤等多種模式,解決不同高度、不同區域多站點間的物料輸送。利用計算機技術,無線網絡,結合物料管理系統,倉庫管理系統,車輛調度管理系統等,實現工廠、倉庫管理運行的自動化。大大提高倉庫或者行業操作的效率,可以替代傳統叉車的所有功能,運行靈活,自動化程度高。
激光導航AGV叉車的優勢
除此以外,相對比傳統叉車,還具有以下功能:
(1)綠色環保
AGV叉車采用電池提供能源,減少了廢氣的排放,降低了噪聲,更加綠色環保。
(2)安全規范
AGV叉車具具有較完善的安全防護能力,有智能化的交通管理,安全與避碰,多級警示,緊急制動,故障報告等。用于工廠倉庫碼垛時,使倉儲更加規范有序,充分提高空間利用率及運輸效率;用于配送物料時,可以減少車間過道作業人員,實現更安全綠色的工廠生產。另外,其運載能力強可以直接叉取物料托盤進行運輸,轉彎時自動減速且有自動識別障礙物并及時停止等功能,行走安全可靠,在工業生產中能代替人做某些單調、頻繁、勞動強度大且重復長時間作業或是危險、惡劣環境下的作業,節省了人力資源,也更多保障了人身安全。
(3)高效便捷
AGV叉車可自動化充電,當AGV小車的電量過低或者比較空閑時會向系統發出請求指令,請求充電,在系統允許后自動到充電的地方排隊充電。這樣就不用擔心因為沒電而作業中斷,只要提前設置好了充電值。其工作任務也由系統統一調度控制,只需要輸入相關的指令就能很好的完成任務,避免各種錯誤的發生,可以保證24小時不間斷工作。還能夠靈活地與各類生產線,裝配線,輸送線,站臺,貨架,作業點等有機結合。實現最大限度地縮短物流周轉周期,降低物料的周轉消耗,實現來料與加工,物流與生產,成品與銷售的柔性銜接,最大限度地提高生產系統的工作效率。
(4)經濟實惠
人工成本逐年提高,而機器人的采購成本呈逐年下降趨勢。怡豐為實現降本增效,推出2019年度標準定制款“貔貅”,也借此來與傳統叉車做經濟性對比,按照普通叉車每臺叉車配備一名司機,不計算每年工資漲幅及其他意外的情況下,做了如下表1的計算。
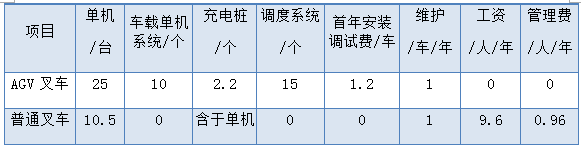
表1:普通叉車和AGV叉車費用細則(單位:萬元)
簡單計算后可得分別使用1臺、3臺、4臺、10臺叉車時的普通叉車和AGV叉車費用比較折線圖如下圖5,由圖可知,當使用一臺叉車時,在第四年,AGV叉車的累計費用已低于普通叉車,使用三臺叉車時,到第三年累計費用已十分接近,第四年AGV叉車的累計費用已遠低于普通叉車,使用四臺及以上時,到第三年AGV叉車的累計費用便已低于普通叉車,越往后可見費用差距越大,AGV叉車的優勢越明顯。因此出于長遠考慮,AGV叉車更經濟,更有優勢。
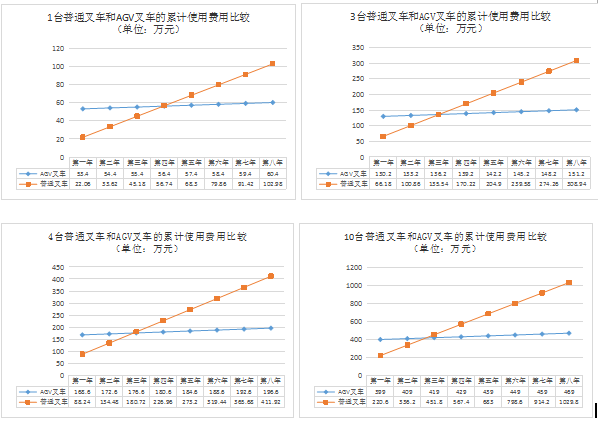
圖4 AGV叉車經濟性評估
通過上述分析對比,AGV叉車的優勢顯而易見,運用范圍也越來越廣,不僅在自動化工廠和柔性制造系統(FMS)中作為最重要的一員,還廣泛地在機械加工、汽車制造、電子產品裝配、造紙、食品加工等行業領域中展現出越來越重要的地位。
為更適應在不同行業的使用,怡豐機器人的激光導航AGV叉車除了“貔貅”叉車外,還有多種系列,分別應用于各種行業,現已有多個叉車項目落地。另外,也可進行個性化定制,在舉升高度上現有項目最高可達5.99m,額定載重最大2.0T,舉升方式多種多樣,主要有堆高式、前移式、平衡重式、托盤式,如下圖5所示,能適應更多應用場景,即使是在-26攝氏度左右的室內也可正常工作,不受影響。除購置叉車進行改裝,怡豐還與叉車廠家合作,可按需定制產品,縮短了定制周期,降低了成本,還可定制整個物流方案,適應各種場景,應用范圍更廣泛,給客戶提供更全面、更個性化服務。
-
人工智能
+關注
關注
1804文章
48723瀏覽量
246558 -
AGV
+關注
關注
27文章
1431瀏覽量
42011
原文標題:怡豐機器人物流叉車AGV---“貔貅”技術分享
文章出處:【微信號:robotinside2014,微信公眾號:移動機器人產業聯盟】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
能夠精準定位的樹莓派機器人!

詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
還在糾結人工or智能?有些工廠已經用聯核叉車機器人創造財富啦


名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
AGV無人叉車/電動叉車的立式舵輪選型指南

agv叉車激光導航和二維碼導航有什么區別?適用什么場景?選哪種比較好?
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
精準定位,激光領航——激光跟蹤儀助力服務機器人性能提升






 工商網監
工商網監
評論