 人腦植入納米機器人 秒速獲取所有知識
人腦植入納米機器人 秒速獲取所有知識

近日,美國加州分子制造研究所的一項新研究項目“人腦/云接口系統”,可以將納米機器植入人體。據悉,該技術可以使個體有能力在云端即刻獲取人類積累的一切知識,從而大幅提高人類的學習能力和智力。我們仿佛離《黑客帝國》更近了!
萬萬沒想到,我們離《黑客帝國》又近了一步。
在這部明見萬里“預言書”般的電影中,主角托馬斯.安德森(化名“尼奧”的黑客),為了搞清楚Matrix到底是什么,義無反顧吞下紅色藥丸,踏上探尋真相之路。
尼奧最終認清了Matrix就是AI人工智能創造的一種神經交互模擬系統,這一系統生成了一個“虛擬現實世界”,囚禁著所有人的意識。而“真實世界”已是殘垣斷壁、滿目瘡痍,殘存的人類躲藏于地下城市錫安(Zion),竭盡所能的抵抗著AI人工智能的圍剿。
整部影片中,這種神經交互模擬系統無疑是一大亮點。而近期的一項研究表明,我們離實現這個種系統更近了!
近日,美國加州分子制造研究所的一項新研究項目“人腦/云接口系統(B / CI)”,可以將納米機器人植入人體,實現與網絡的實時連接。
納米機器人(Nanobots)是一種比人類頭發絲的寬度還小的微型機器人,這種機器人有望在未來以各種方式造福人類和地球。但要實現B/CI,需要一種特殊的機器人:神經納米機器人。
正如該領域資深研究人Robert Freitas, Jr.所說:
這些機器人將在人體血管系統內導航,穿過血腦屏障,并精確地在腦細胞之間、甚至腦細胞內部進行自動定位。然后,它們將編碼的信息無線傳輸到一個基于云的超級計算機網絡,以實現在網絡中進行實時的大腦狀態監測和數據提取。
而且,這種腦機接口問世的時間可能大大早于很多人的預期,或許幾十年內就可以實現!
研究人員表示,雖然目前還沒有進行大規模人類試驗階段,但這項新生技術已經存在,并在較小規模上取得了成功。
人腦/云接口,秒速獲取人類所有知識
這項研究發表在了《前沿(Frontiers)》系列期刊中的神經科學板塊中。
研究人員在論文中說,一個穩定、安全、實時的系統可以將云與人腦連接起來。實現這樣一個系統的一種有希望的策略,稱為“人腦/云接口”(B/CT),將基于一種稱為“神經納米機器人”(neuralnanorobotics)的技術。
研究人員預計,未來的神經納米機器人技術將有望促進對影響人類大腦的~400種疾病進行精確診斷和最終治療。
神經納米機器人還將通過直接地檢測大腦的~86×109個神經元和~2×1014個突觸,使B/CI能夠控制神經活動與外部數據存儲和處理之間的連接。
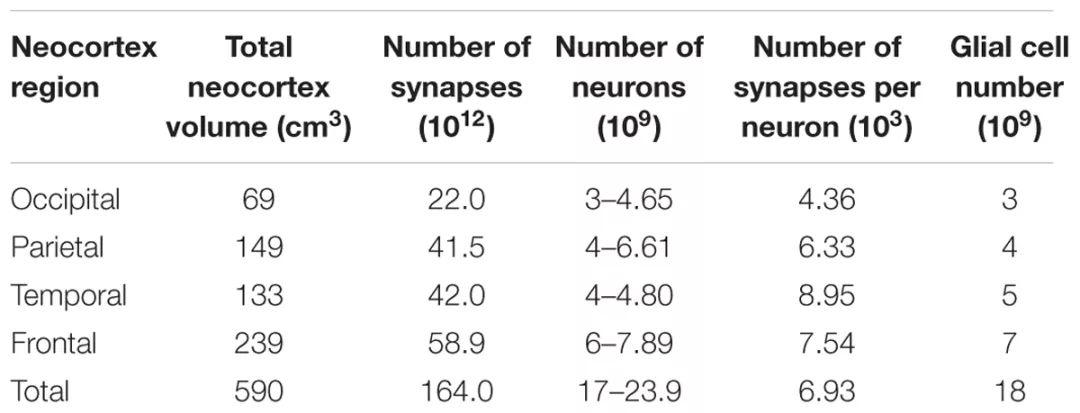
大腦新皮層中神經元和突觸的計數
此外,通過在人體血管系統內進行導航,三種神經納米機器人(endoneurobots,gliabots, 和synaptobots)還可以穿過血腦屏障(blood–brain barrier, BBB),進入腦實質,甚至進入單個腦細胞,分別在神經元的軸突初始段(endoneurobots)、神經膠質細胞內(gliabots)和親密接近突觸時 (synaptobots)進行自動定位。
然后,它們將通過輔助納米機械光纖,以高達每秒~6×1016比特的速度無線傳輸突觸處理的信息和編碼人腦電信息。輔助納米光纖的傳輸能力達1018bits/每秒,并能為基于云的超級計算機提供快速的數據傳輸,以實現實時大腦狀態監測和數據提取。
神經元 (藍色) 和膠質 (白色) 細胞
基于神經納米技術的人類B/CI可以允許人們直接、即時地訪問幾乎所有人類知識。
其他預期的應用包括改善教育、智力、娛樂、旅游和其他無數的互動體驗。例如,專門的應用程序可以提供完全沉浸式體驗/感官體驗的能力,包括這里所說的“透明陰影”(TS)。通過TS,個人可以體驗到其他自愿參與者(本地或遠程)生活的片段。研究人員表示,希望這類應用能夠鼓勵和激發人類家庭所有成員之間更好的理解和寬容。
3種神經納米機器人,實現人腦/云接口
神經納米機器人有望提供一種非破壞性、實時、安全、長期,并且實際上是自主的體內系統,可實現首個有效的人類 B/CI。
如前文所述,監測細胞內結構和功能連接的是三類神經納米機器人,分別是endoneurobots、synaptobots 和 gliabots。以及一個非侵入式、自安裝的高速納米光纖網絡。
Endoneurobots
神經納米機器人可能會通過皮膚注射,然后它們將在血管系統內導航,并錨定在血腦屏障的內皮細胞上。
Endoneurobots 是一種自主停留在神經元中的神經納米機器人,它與 AIS 中所有~86 × 109 的人腦神經元相連接,直接監控并與基于動作電位的電處理信息相交互。
如圖 3 所示,10μm3 的 endoneurobots 將進入腦實質,并開始在神經纖維網導航。
圖 3:endoneurobot (左),具有鉆石型的結構 (右)。
在這里,突觸處理的基于動作電位的信息被視為基本信息,Synaptobots 將檢測到所有這些信息及其波形,并向數據處理系統報告。
所有這些數據都將以亞毫秒級的分辨率連續處理,從而實現人腦和云之間的實時數據流。
Gliabots
Gliabots 是一種停留在神經膠質內的自主神經納米機器人,可以監測人腦神經膠質細胞,并可能進一步作為系統的支持元素。
如圖 4 所示,10μm3 的 gliabots 將進入各自的神經膠質細胞。
圖 4:gliabots 的示意圖
Synaptobots
Synaptobots 是停留在神經元中的自主神經納米機器人,它可能使用多個靈活的納米傳感器與人腦中的所有~2×1014 個突觸連接,以直接監控突觸處理和存儲的信息,并與之交互。
圖 5 描述了 Synaptobots 的結構。
圖 5:synaptobot (左) 和它的鉆石型結構 (右)
輔助納米纖維光學系統(圖 6)與 endoneurobot 和 gliabot 的數據傳輸支持相結合,有助于最小化數據存儲需求。
圖 6:無線納米級發射器
人類對腦機連接的探索永不止步
將人腦與計算機相連,是科學家們長期的瘋狂而又浪漫的夢想。在這篇論文中,研究人員還列舉了當前對腦機連接的研究中一些有前途的方法。
納米粒子、納米管和納米點
有望與大腦神經網絡實現接口的一種有前途的技術是磁電納米粒子(magnetoelectric nanoparticles),該技術可用于增強外部磁場與神經網絡發出的局部電場之間的耦合。
不過,將納米粒子輸送到人類大腦中是一個巨大的挑戰。此外,在納米粒子在人體內應用之前,必須有效地處理感染、炎癥反應、潛在免疫原性、細胞毒性和致瘤性等風險。
基于碳納米管的對大腦深處靶標進行電刺激已經被提出作為帕金森病和其他中樞神經系統疾病的一種新型治療方式。
可注射的“神經織網”(Neural Lace)
最近提出的一種被稱為“神經織網”(neural lace)的技術,可以在微觀尺度將大腦神經網絡和計算機系統進行整合。
這個概念基于超柔性網狀納米電子學,已經取得一定的進展。馬斯克的Neuralink公司也正在研究這種技術。
神經塵埃(Neural Dust)
該技術采用數千個獨立的10-100μm de傳感器節點,稱為。這些節點,稱為“神經塵埃”(Neural Dust),可以檢測并報告局部細胞外電生理數據,同時使用顱下詢問器與每個節點建立電源和通信鏈路。
腦機接口(BMI)
腦機接口技術目前使用由神經微芯片傳感器陣列組成的侵入性神經接口進行研究。神經芯片傳感器陣列包含多個電極,可以檢測多細胞信號。這些腦機接口已經對大腦的一些區域(例如,視覺皮層,運動皮層,海馬體等)可用。
腦-腦接口(Brain-To-Brain Interface)
BTBI涉及誘導兩個不同的大腦直接相互通信。BTBI系統最初使用非侵入性記錄和腦刺激進行實驗,如圖2所示。
圖2:人類受試者之間信息傳遞的腦-腦接口(BTBI)
Brainet系統
BTBI技術的一個特別有趣的應用,稱為“Brainets”,涉及從多個大腦記錄的神經元信號的接口和處理,以實現互連大腦之間的信息交換和執行合作任務。
雖然還不是特別復雜,但最近對老鼠和猴子的實驗一定程度上證明了Brainet系統的效果,包括驗證在大鼠的感覺運動皮層中永久植入微電極之后,位于不同大陸的兩只大鼠的大腦之間潛在的直接通信。
-
機器人
+關注
關注
213文章
29756瀏覽量
213047 -
AI
+關注
關注
88文章
35194瀏覽量
280276
發布評論請先 登錄





 工商網監
工商網監
評論