") 反駁馬斯克:激光雷達(dá)不可或缺,高精地圖也遠(yuǎn)未完善
反駁馬斯克:激光雷達(dá)不可或缺,高精地圖也遠(yuǎn)未完善
從去年下半年開始,關(guān)注自動駕駛領(lǐng)域的人感覺到,這個領(lǐng)域已經(jīng)從頭幾年的狂熱期逐漸趨于冷靜,無論是融資還是關(guān)于技術(shù)突破方面的消息不再源源不絕。另一方面,高精地圖對于推動自動駕駛應(yīng)用在實(shí)際場景來說至關(guān)重要,它相當(dāng)于自動駕駛車輛的“雙眼”+“指揮中心”,決定著自動駕駛車輛的行駛路線,從而也決定了車輛和乘客的安全。本文將通過自動駕駛高精地圖服務(wù)公司 DeepMap 工程技術(shù)總監(jiān)鄒亮,全面了解對于自動駕駛至關(guān)重要的高精地圖從生產(chǎn)制作到實(shí)踐部署的過程,以及他對于自動駕駛生態(tài)的看法。
2016 年,在硅谷 Palo Alto,前百度無人車部門的首席架構(gòu)師吳夏青(James Wu)與他的前同事——谷歌地圖引擎創(chuàng)始人 Mark Wheeler 一同創(chuàng)辦了一家名為 DeepMap 的公司,旨在開發(fā)能夠幫助無人駕駛車輛在復(fù)雜而不可預(yù)測的真實(shí)世界中自主導(dǎo)航的技術(shù)能力,其中高精 3D 地圖是他們的主打產(chǎn)品。
高精地圖主流技術(shù)
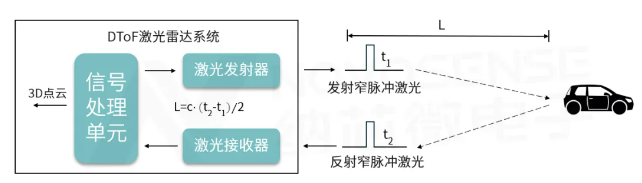
首先我們來了解一下高精地圖的概念。高精地圖不是相對于普通的導(dǎo)航電子地圖精度更高的一種地圖,普通的導(dǎo)航電子地圖是面向人類駕駛員使用,而高精度地圖由自動駕駛汽車直接讀取,用于自動駕駛汽車的定位和道路規(guī)劃。高精地圖自動駕駛常用的傳感器包括:激光雷達(dá) (LiDAR)、相機(jī) (Camera)、GPS 和慣導(dǎo) (IMU)。
DeepMap 3D 定位地圖
高精地圖對于自動駕駛的重要性不言而喻,它們就像是人類的“雙眼”+“指揮中心”,決定著無人車行駛的路線。現(xiàn)在市面上的高精地圖產(chǎn)品主要有哪些類型呢?它們的優(yōu)勢和不足有哪些?
鄒亮告訴 AI 前線記者,目前主流的高精地圖主要分為兩大類,一是激光點(diǎn)云融合技術(shù),簡單來說就是用激光雷達(dá)掃描,返回場景分布點(diǎn)的技術(shù);二是基于圖像和 GPS 的技術(shù)。其中,激光點(diǎn)云融合的技術(shù)又分為兩種,一是基于點(diǎn)云融合的算法,其應(yīng)用場景較廣,不僅限于 GPS 場景,這也是 DeepMap 采用的技術(shù)思路;第二種是基于比較精確的差分 GPS 和精確慣導(dǎo)(IMU,慣性測量單元),其對場景依賴較強(qiáng),必須在比較開闊的場景使用,對于高架橋等 GPS 信號弱的場景效果不佳。基于圖像和 GPS 技術(shù)解決方案精度比較差,主要用來制作 L2、L3 的 ADAS 地圖,而激光點(diǎn)云則可以滿 L4、L5 的需求。
鄒亮表示,DeepMap 生產(chǎn)的高精地圖,精度可達(dá)到 5cm,定位精度在 10cm 以內(nèi),而市面上的產(chǎn)品精度一般在 20cm 左右。
高精地圖生產(chǎn)關(guān)鍵點(diǎn)
大規(guī)模、低成本生產(chǎn)無人駕駛高精地圖是業(yè)界難點(diǎn),解決這個問題的關(guān)鍵點(diǎn)是什么?鄒亮表示,大規(guī)模制圖的關(guān)鍵點(diǎn)主要包括三點(diǎn):
數(shù)據(jù)采集的管理,需要有數(shù)據(jù)采集路線和需要更新的數(shù)據(jù),才能合理判斷道路的采集方式和最省時省資源的路線,而這些都需要好的設(shè)計(jì)才能優(yōu)化達(dá)到最高效率;
大數(shù)據(jù)處理,高精地圖所需要處理的數(shù)據(jù)量巨大,必須使用數(shù)據(jù)中心計(jì)算機(jī)集群來做處理,并且涉及到很多并行計(jì)算和處理,這些對數(shù)據(jù)處理能力都是極大的考驗(yàn);
高精地圖的實(shí)時更新也相當(dāng)重要,道路環(huán)境有可能在不斷的變化,需要實(shí)現(xiàn)快速有效的更新發(fā)生變化的區(qū)域。
實(shí)際應(yīng)用中的挑戰(zhàn)
目前,DeepMap 在高精地圖生產(chǎn)過程中主要有以下應(yīng)用,但各種應(yīng)用過程中都還有需要不斷克服的挑戰(zhàn):
圖像語義分割
圖像語義分割是將圖像中每一個像素劃分在預(yù)先規(guī)定的幾個類別中,不同類別對應(yīng)不同的語義信息。用于交通標(biāo)識的檢測,包括車道線、標(biāo)識牌、信號燈等,它的難點(diǎn)在于需要生成出不同國家或地區(qū)的訓(xùn)練集。比如在美國,同屬加州的舊金山收集的數(shù)據(jù)不一定在洛杉磯可以用,不同國家之間差異就更大了。
路牌、信號燈檢測
現(xiàn)在可以做到自動生成路牌和信號的 3D 位置,但還需要進(jìn)一步提高檢測的召回率,這很好理解,在真正的無人駕駛場景中,不能輕易漏掉任何一個物體,因?yàn)槿绻┑袅藭菀桩a(chǎn)生嚴(yán)重的安全事故。難點(diǎn)二是從 2D 圖像到 3D 坐標(biāo)中的朝向有時不太準(zhǔn)確,需要人工調(diào)整。
車輛檢測
高精地圖需要把車輛等臨時存在物去除,所以需要做車輛檢測。車輛是一種很常見的可移動障礙物,可以使用現(xiàn)有的深度學(xué)習(xí)模型計(jì)算出車輛的 3D 位置,來完成車輛的移除,除此之外還會用到相機(jī)和激光雷達(dá)得到的數(shù)據(jù)結(jié)果。
3D 點(diǎn)云車輛檢測
DeepMap 3D 點(diǎn)云車輛檢測
通過算法,DeepMap 使用點(diǎn)云數(shù)據(jù)和圖像訓(xùn)練出的模型,可用于直接去除點(diǎn)云中的車輛點(diǎn),并提高點(diǎn)云匹配的精度。但 3D 點(diǎn)云車輛檢測也存在一些挑戰(zhàn),難點(diǎn)之一在于前面提到的訓(xùn)練集,高質(zhì)量的訓(xùn)練集比較難以獲取,這些數(shù)據(jù)集獲取時間久、價格高;難點(diǎn)二在于精確率不如 2D 圖像深度學(xué)習(xí)結(jié)果準(zhǔn)確。
除此之外,高精地圖技術(shù)和實(shí)際應(yīng)用之間的鴻溝還有很多,在自動駕駛真正上路之時仍然會遇到很多挑戰(zhàn)。比如在地下車庫場景中最突出的完全沒有 GPS(+ 信號)的現(xiàn)象。由于低成本 IMU 慣導(dǎo)無法獲取精確的初始位置,因此難以進(jìn)行定位。面對這一問題,DeepMap 采用了基于低成本的傳感器,以及點(diǎn)云融合和 ICP 的算法成功地進(jìn)行了車庫地圖制作。而對于其他廠商來說,地下車庫地圖制作很困難,但也不是沒有辦法,一種方案是采用高成本的激光雷達(dá)進(jìn)行精準(zhǔn)測量,但是成本較高。在這一問題上,DeepMap 的優(yōu)勢在于可以低成本完成高精地圖制作。
激光雷達(dá)不可或缺,高精地圖也遠(yuǎn)未完善
關(guān)于高精地圖,馬斯克近日來發(fā)表的那句引起了很大爭議的言論絕對值得一提:“False and foolish = HD maps and LiDAR”。和很多人一樣,鄒亮也并不認(rèn)同這一說法。
他認(rèn)為,馬斯克說這句話的出發(fā)點(diǎn)可能在于目前來說激光雷達(dá)的成本太高,甚至超過一輛汽車的價格,如果激光雷達(dá)的成本降低,馬斯克也許就不會這么說了。在他看來,目前激光雷達(dá)對于安全自動駕駛是必不可少的設(shè)備之一,隨著激光雷達(dá)創(chuàng)企的發(fā)展,激光雷達(dá)的成本將達(dá)到廠商可承受的范圍之內(nèi)。但另一方面,這句話在未來也許會成為現(xiàn)實(shí),那就是當(dāng)圖像技術(shù)能夠達(dá)到人眼的級別時,激光雷達(dá)可能就不是必需的了,但這一天何時到來,鄒亮表示至少要在十年之后。
鄒亮認(rèn)為,高精地圖技術(shù)現(xiàn)在仍然有待開發(fā),遠(yuǎn)遠(yuǎn)還未達(dá)到完善的階段,我們雖然有全國高速公路的數(shù)據(jù),但 還沒有任何一家廠商能夠制作覆蓋全國的針對 L4 和 L5、采用點(diǎn)云融合技術(shù)的高精地圖, 這是自動駕駛領(lǐng)域的一個缺憾和空白。
目前,高精地圖主要面向 L2、L3 級自動駕駛車輛,但由于國家政策和技術(shù)能夠?qū)崿F(xiàn)的精度不夠,高精地圖還未大規(guī)模使用。另一方面,L4、L5 級自動駕駛依賴于激光雷達(dá),但是由于需求的數(shù)據(jù)量太大、場景變化太多,相應(yīng)的點(diǎn)云融合技術(shù)目前還未實(shí)現(xiàn),未來還需要繼續(xù)完善。
那么,高精地圖的發(fā)展究竟受到了什么限制,才遲遲難以突破近在眼前的問題?鄒亮表示,主要瓶頸在于這幾點(diǎn):
測繪行業(yè)政策嚴(yán)格,并非所有企業(yè)都被允許進(jìn)入測繪行業(yè);
國家還未確定何時開放公共道路無人車測試,只有大規(guī)模的需求才能促進(jìn)高精地圖發(fā)展;
高精地圖的商業(yè)模式還無法支撐整個行業(yè)的進(jìn)一步發(fā)展。在 DeepMap,商業(yè)產(chǎn)品的形式主要包括四種,一是為無人車初創(chuàng)公司、傳統(tǒng)車企和技術(shù)難點(diǎn)無法突破的圖商提供高精地圖定制化生產(chǎn);二是定位服務(wù),這和高精地圖息息相關(guān);三是多傳感器的標(biāo)定,實(shí)現(xiàn)坐標(biāo)轉(zhuǎn)換;四是低成本數(shù)據(jù)收集方案。
自動駕駛領(lǐng)域趨于冷靜是好事
鄒亮表示,高精地圖是自動駕駛不可或缺的技術(shù),Waymo、Cruise 等已經(jīng)證明了其價值。但在技術(shù)上,高精地圖廠商亟需解決制作覆蓋全國的點(diǎn)云融合高精地圖的問題,以及實(shí)現(xiàn)地圖的及時更新。
關(guān)于自動駕駛趨于冷靜,鄒亮表示,自動駕駛是一個對技術(shù)要求較高的領(lǐng)域,市場冷靜下來有利于優(yōu)勝劣汰,讓真正做技術(shù)的自動駕駛公司存活下來,讓一些公司可以做真正有利于這個行業(yè)的技術(shù),總體上利大于弊。Cruise 剛拿下的天價融資額,也驗(yàn)證了這個觀點(diǎn)。
而對于繞不開的自動駕駛安全性問題,鄒亮則直接給出了建議,他認(rèn)為可以通過多傳感器融合技術(shù)來解決,因?yàn)橐蕾囉谌魏我粋€傳感器都會存在風(fēng)險,如果特斯拉不過于依賴攝像頭,使用了激光雷達(dá),也許多起悲劇事故本可以避免,將風(fēng)險降到最低。
-
特斯拉
+關(guān)注
關(guān)注
66文章
6372瀏覽量
128706 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4208瀏覽量
192180
原文標(biāo)題:反駁馬斯克:自動駕駛離不開激光雷達(dá),圖像技術(shù)成熟至少還要十年
文章出處:【微信號:smartman163,微信公眾號:網(wǎng)易智能】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
激光雷達(dá)在自動駕駛領(lǐng)域中的優(yōu)勢

特斯拉內(nèi)部擔(dān)憂馬斯克影響
激光雷達(dá)光電組件的AEC-Q102認(rèn)證:保障自動駕駛硬件的可靠性與品質(zhì)

一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
馬斯克凈資產(chǎn)突破4470億美元
馬斯克重申:純視覺是自動駕駛的未來
馬斯克欲阻OpenAI商業(yè)化轉(zhuǎn)型
馬斯克否認(rèn)特斯拉進(jìn)軍手機(jī)市場
激光雷達(dá)技術(shù)的發(fā)展趨勢
GaN HEMT驅(qū)動芯片NSD2017助力解決激光雷達(dá)應(yīng)用挑戰(zhàn)
激光雷達(dá)濾光片:自動駕駛的“眼睛之選”

馬斯克:比特幣是有價值的
?小鵬新車或放棄激光雷達(dá) 馬斯克發(fā)評論
曾被馬斯克嫌棄的激光雷達(dá),已在新能源汽車領(lǐng)域提前“跨越鴻溝”

納芯微GaN HEMT驅(qū)動芯片NSD2017在激光雷達(dá)中的優(yōu)勢






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論