 現代步進電機如何工作
現代步進電機如何工作
步進電機
步進電機是一種將電脈沖轉化為角位移的執行機構。其將電脈沖信號轉變為角位移或線位移,是現代數字程序控制系統中的主要執行元件,應用極為廣泛。

步進電機控制系統由步進電機控制器、步進電機驅動器、步進電機三部分組成,步進電機控制器是指揮中心,它發出信號脈沖給步進電機驅動器,而步進電機驅動器把接收到信號脈沖脈沖轉化為電脈沖,驅動步進電機轉動,控制器每發出一個信號脈沖,步進電機就旋轉一個角度,它的旋轉是以固定的角度一步一步運行的。控制器可以通過控制脈沖數量來控制步進電機的旋轉角度,從而準確定位。通過控制脈沖頻率精確控制步進電機的旋轉速度。
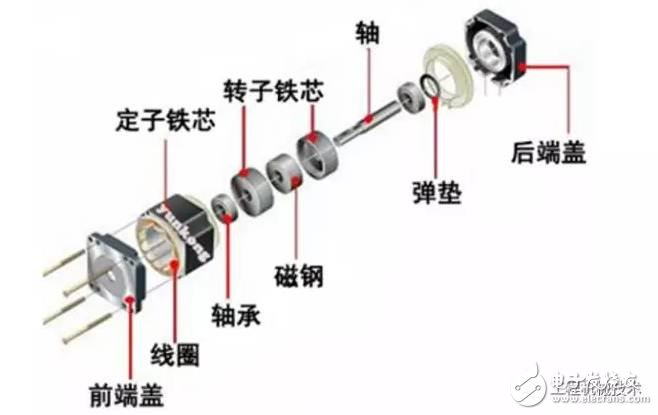
步進電機的結構及工作原理
通常電機的轉子為永磁體,當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。
每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
我們一般用的步進電機是這樣的:
他的結構圖一般是這樣的:
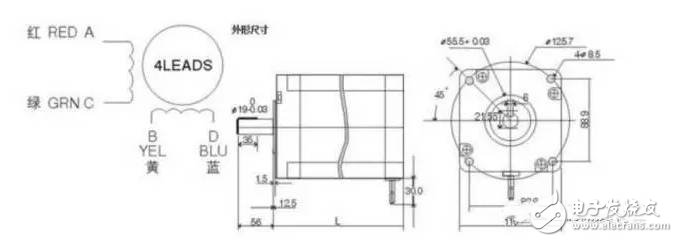
那么這個AC,BD代表什么呢?步進電機又為什么具有以上的那些特點呢?這就要從步進電機的特殊結構說起。先上一個步進電機內部的結構示意圖:
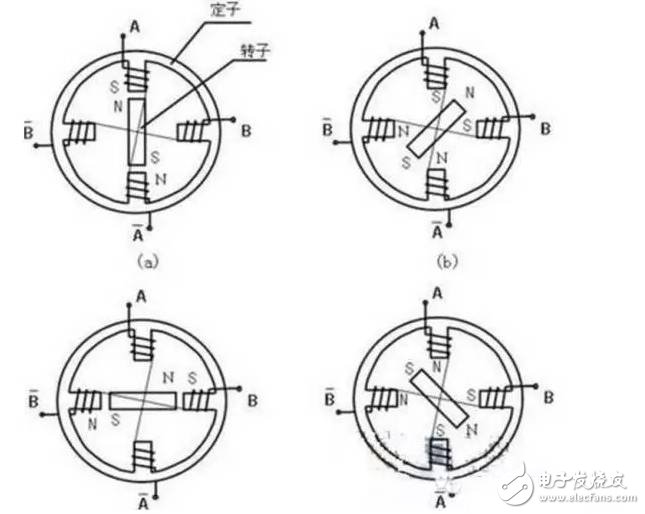
先從這個簡單的圖分析原理,圖中有兩組繞組A A-,B B-,可以看出他們分別形成的磁場是相反的,位置也是相對的。這2組繞組對應真實圖中的AC和BD。
定子為鐵芯,A A-,B B-繞在鐵芯上,通電之后產生磁場變成電磁鐵,轉子為永磁體,磁場將對轉自產生吸引或者排斥。
左上圖A A-吸引轉子,使得轉子豎直(此時只有A A-通電)當B B-也通電后,B B-也產生磁場,此時轉自將像A B中間區域偏轉,具體偏轉角度跟A B上電流大小比例有關。
左下圖此時A A-斷電,B B-繼續通電,則轉子被吸引到水平位置。
右下圖此時A A-反向通電,B B-繼續通電,則轉自順時針旋轉,重復以上過程,則轉子可以進行旋轉運動,并控制通電的時機以及順序,便可以達到控制步進電機旋轉角度。
定子鐵心:定子鐵心為凸極結構,由硅鋼片迭壓而成。在面向氣隙的定子鐵心表面有齒距相等的小齒。
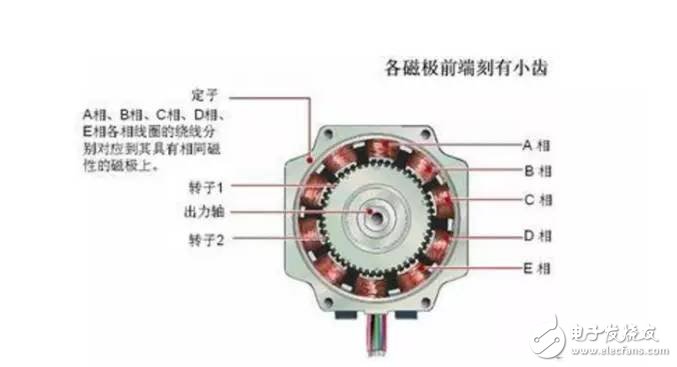
定子繞組:定子每極上套有一個集中繞組,相對兩極的繞組串聯構成一相。步進電動機可以做成二相、三相、四相、五相、六相、八相等。
轉子:轉子上只有齒槽沒有繞組,系統工作要求不同,轉子齒數也不同。定轉子齒形相同。
原理
當步進電機切換一次定子繞組的激磁電流時,轉子就旋轉一個固定角度即步距角。步距角一般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為兩相以上的,當然也有一些特殊的只有一個線圈的單相步進電機。雖說單相,實為一個線圈產生的磁通方向交互反轉而驅動轉子轉動。實用的步進電機的相數有單相、兩相、三相、四相、五相。
現在使用的步進電機大部分用永磁轉子。普遍使用永久磁鐵的原因是效率高,分辨率高等優點。
-
步進電機
+關注
關注
152文章
3154瀏覽量
149078
發布評論請先 登錄
步進電機的控制實現方法

微型步進電機:現代科技中的精確動力源泉
步進電機的詳解解答
行星減速步進電機與步進電機的區別

什么是步進電機?它的工作原理是什么?
步進電機的工作原理介紹

步進電機的類型及工作原理





 工商網監
工商網監
評論