") 探析自動(dòng)駕駛汽車的安全衡量方法
探析自動(dòng)駕駛汽車的安全衡量方法
Waymo是在加州最早開(kāi)展測(cè)試的自動(dòng)駕駛廠商,其提供的報(bào)告也是所有廠商中最詳細(xì)的。而且其他大部分廠商基本都沿用了Waymo的技術(shù)語(yǔ)言體系,如感知偏差、硬件偏差、軟件偏差、不必要的行為、計(jì)劃偏差等。在31家提交實(shí)際測(cè)試報(bào)告的廠商中,僅有10%的廠商能夠達(dá)到CDMV“Description of fact causing disengagement(用具體事例描述自動(dòng)模式解除的原因)”的要求,但也并不十分詳細(xì)。
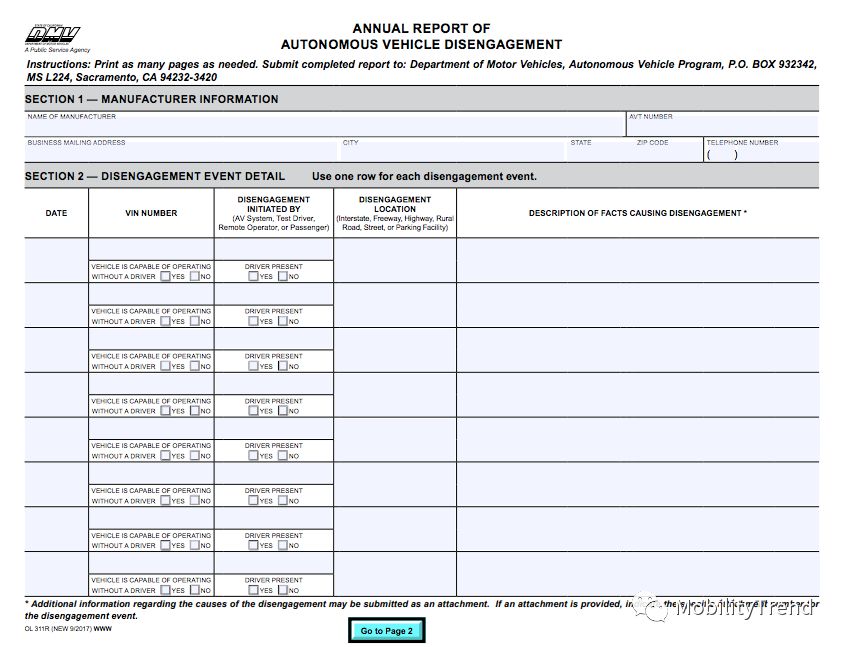
加州機(jī)動(dòng)車輛管理局(CDMV)已連續(xù)4年(2015-2018年)公布在其境內(nèi)開(kāi)展公共道路測(cè)試的自動(dòng)駕駛廠商的自動(dòng)模式解除(disengagement)報(bào)告,相比于往年1月底2月初的公布時(shí)間,今年報(bào)告直到2月13日才正式公布,時(shí)間較晚,這可能與今年的報(bào)告要求各廠商采用新的報(bào)告模板(參見(jiàn)下圖)、以及需提交報(bào)告的廠商數(shù)量較多(根據(jù)CDMV的規(guī)定,在取得測(cè)試牌照一年后,必須提交年度測(cè)試報(bào)告,2018年度有48家廠商需要提交報(bào)告,僅有31家開(kāi)展了實(shí)際測(cè)試,其中APTIV僅有2項(xiàng)簡(jiǎn)單數(shù)據(jù))有一定關(guān)系,今年報(bào)告模板新增一項(xiàng)特別標(biāo)注星號(hào)的項(xiàng)目——Description of fact causing disengagement(用具體事例描述自動(dòng)模式解除的原因)。
實(shí)際上,針對(duì)各自動(dòng)駕駛廠商2017年提交的報(bào)告,CDMV在2018年2月18日就要求其中的8家廠商提交了補(bǔ)充性報(bào)告,包括Waymo、Baidu、Cruise、Delphi、Drive ai、Nissan、Telenav、Zoox。主要原因是CDMV認(rèn)為各廠商的報(bào)告中對(duì)自動(dòng)模式解除原因解釋所采用的技術(shù)術(shù)語(yǔ)模糊不清,因此要求結(jié)合具體事例進(jìn)行說(shuō)明。
Waymo是在加州最早開(kāi)展測(cè)試的自動(dòng)駕駛廠商,其提供的報(bào)告也是所有廠商中最詳細(xì)的。而且其他大部分廠商基本都沿用了Waymo的技術(shù)語(yǔ)言體系,如感知偏差、硬件偏差、軟件偏差、不必要的行為、計(jì)劃偏差等。在31家提交實(shí)際測(cè)試報(bào)告的廠商中,僅有10%的廠商能夠達(dá)到CDMV“Description of fact causing disengagement(用具體事例描述自動(dòng)模式解除的原因)”的要求,但也并不十分詳細(xì)。10%仍沿用Waymo此前的技術(shù)語(yǔ)言體系。還有部分廠商對(duì)原因的描述簡(jiǎn)單,如奔馳、Nullmax所描述的原因全部是“測(cè)試計(jì)劃的組成部分”。Apple甚至沒(méi)有采用DMV所要求的模板。不知道CDMV后續(xù)是否會(huì)和去年一樣、要求這些廠商提交補(bǔ)充性報(bào)告進(jìn)行進(jìn)一步說(shuō)明。
自動(dòng)駕駛汽車僅靠訓(xùn)練不足以達(dá)到完美
在去年3月Uber自動(dòng)駕駛汽車發(fā)生致亡事故之前,自動(dòng)駕駛技術(shù)始終在描繪著一幅近乎于完美的成功畫(huà)卷。在一個(gè)炙手可熱的全新領(lǐng)域,工程師們讓軟件發(fā)揮出足以撼動(dòng)整個(gè)世界的力量,在挽救無(wú)數(shù)生命的同時(shí)創(chuàng)造巨大的財(cái)富。但在這場(chǎng)事故過(guò)后,鋪天蓋地的質(zhì)疑聲隨之而來(lái)。自動(dòng)駕駛汽車是怎樣運(yùn)行的、其安全性到底是什么水平、誰(shuí)能保證那些開(kāi)發(fā)廠商沒(méi)有說(shuō)謊?
當(dāng)然,這項(xiàng)技術(shù)的原理并不容易解釋清楚,想要真正實(shí)現(xiàn)更是難上加難。正因如此,擁有相關(guān)技術(shù)經(jīng)驗(yàn)的人才都能拿到令人稱羨的高薪,而這也是美國(guó)聯(lián)邦政府至今仍未出臺(tái)明確的自動(dòng)駕駛汽車監(jiān)管法規(guī)的原因。去年10月,美國(guó)交通部在《AV3.0》中再次重申了其對(duì)于自動(dòng)駕駛的立場(chǎng):不會(huì)選擇孰優(yōu)孰劣,但希望相關(guān)企業(yè)能提交詳盡的安全策略報(bào)告。但截至目前,僅有9家廠商響應(yīng)了聯(lián)邦政府的號(hào)召。
在這樣一個(gè)充滿未知的領(lǐng)域里,“自動(dòng)駕駛行駛里程”作為一項(xiàng)簡(jiǎn)單易懂的測(cè)評(píng)指標(biāo)被引入到公眾面前。過(guò)去幾年間,Waymo一直在著力宣傳其車輛行駛里程的龐大數(shù)字,該公司在公共道路的行駛里程已超過(guò)1000萬(wàn)英里,并且還進(jìn)行了超過(guò)70億英里的模擬測(cè)試。《紐約時(shí)報(bào)》此前披露的Uber內(nèi)部文件顯示,這家網(wǎng)約車公司也一直在通過(guò)行駛里程來(lái)衡量自身的自動(dòng)駕駛技術(shù)研發(fā)進(jìn)展。這么做的不只是企業(yè),很多媒體也都用里程數(shù)作為自動(dòng)駕駛汽車技術(shù)的衡量標(biāo)準(zhǔn)。
如果通過(guò)練習(xí)可以達(dá)到完美,那么是不是自動(dòng)駕駛汽車的行駛里程越多,就越接近于完美?當(dāng)然不是。
“脫離了具體的行駛環(huán)境條件,行駛里程本身不足以成為一項(xiàng)有效的衡量指標(biāo),”Uber先進(jìn)技術(shù)項(xiàng)目組 (Advanced Technologies Group) 系統(tǒng)安全主管 Noah Zych 表示,“我們還需要知道——車輛遇到了哪些情況,車輛能夠應(yīng)對(duì)哪些情況,在這些區(qū)域的測(cè)試目標(biāo)是什么,是要收集數(shù)據(jù)、是要證明車輛系統(tǒng)能在這些場(chǎng)景下完成行駛?cè)蝿?wù)、還是只為了‘刷數(shù)據(jù)’?”
以駕照考試為例,并不是說(shuō)駕駛者能駕駛一定里程并且不發(fā)生事故就可以拿到駕照,考官會(huì)針對(duì)不同場(chǎng)景對(duì)駕駛者進(jìn)行考察。如果汽車廠商想要兌現(xiàn)他們的承諾,自動(dòng)駕駛汽車就要能在類似于駕校考試的不同場(chǎng)景中拿出遠(yuǎn)超人類的表現(xiàn)。
Waymo也表示同意這一觀點(diǎn)。該公司的自動(dòng)駕駛里程數(shù)一騎絕塵,“重點(diǎn)并不在于里程數(shù)的增加,而是要改善駕駛質(zhì)量,設(shè)置不同的挑戰(zhàn),使行駛里程具備真正的價(jià)值,”該公司發(fā)言人如此表示,Waymo同時(shí)也非常重視模擬行駛里程。
自動(dòng)模式解除次數(shù)作為自動(dòng)駕駛安全性衡量指標(biāo)更不靠譜
在媒體報(bào)道和相關(guān)政策的制定中,“自動(dòng)模式解除”也被作為衡量自動(dòng)駕駛汽車安全性的一項(xiàng)重要指標(biāo)。研發(fā)者們紛紛表示,如果要用來(lái)衡量安全性的話,自動(dòng)模式解除次數(shù)甚至還不如行駛里程靠譜。
“如果自動(dòng)駕駛汽車還在學(xué)習(xí)階段,就一定會(huì)有關(guān)閉自動(dòng)駕駛系統(tǒng)的情況發(fā)生,”曾擔(dān)任前谷歌自動(dòng)駕駛汽車項(xiàng)目主管多年的Aurora自動(dòng)駕駛團(tuán)隊(duì)CEO Chris Urmson表示,“解除自動(dòng)模式的頻率其實(shí)與自動(dòng)駕駛汽車學(xué)到了多少東西成正比,在開(kāi)發(fā)期間,它們與所取得的進(jìn)步是正相關(guān)的,”Urmson和其他一些業(yè)內(nèi)人士認(rèn)為,加州DMV對(duì)于提交報(bào)告的規(guī)定實(shí)際上會(huì)扼殺車輛系統(tǒng)嘗試通過(guò)解決難題而獲得提升的意愿。因?yàn)槊鎸?duì)過(guò)分解讀這些數(shù)字的公眾和監(jiān)管部門,如果自動(dòng)駕駛廠商在不怎么需要解除自動(dòng)模式的的條件下進(jìn)行測(cè)試,就能顯得更出眾。道理很簡(jiǎn)單。

今年多個(gè)媒體將上述圖表作為各自動(dòng)駕駛廠商的技術(shù)排名進(jìn)行了過(guò)度解讀,尤其是作為明星科技公司的Apple排名在最后,而特別成為吸引眼球的話題。各廠商提交給CDMV的報(bào)告,“自動(dòng)模式解除原因”是最能體現(xiàn)各廠商技術(shù)實(shí)力的部分,作為公眾可以接觸的有限的自動(dòng)駕駛公開(kāi)數(shù)據(jù),CDMA希望通過(guò)Disengagement報(bào)告和自動(dòng)駕駛事故報(bào)告,讓公眾了解自動(dòng)駕駛的技術(shù)進(jìn)展和存在問(wèn)題,但如本文開(kāi)頭所述,各廠商在進(jìn)行原因描述時(shí)均“猶抱琵琶半遮面”,有廠商以一個(gè)原因“軟件偏差”解釋了測(cè)試過(guò)程中所有的自動(dòng)模式解除。當(dāng)然,主要問(wèn)題在于各廠商對(duì)于共享信息的疑慮。自動(dòng)駕駛領(lǐng)域正在進(jìn)行一場(chǎng)競(jìng)賽,各廠商不會(huì)輕易亮出自己的底牌,對(duì)彼此和公眾很難較大程度的提升透明度。
建立自動(dòng)駕駛安全性衡量框架
CDMV公布的自動(dòng)駕駛測(cè)試報(bào)告表明,如果人類駕駛員無(wú)法接管車輛,現(xiàn)階段的自動(dòng)駕駛技術(shù)尚不足以確保安全行駛。有鑒于此,美國(guó)消費(fèi)者監(jiān)察組織指出,第一批獲準(zhǔn)在不受人類監(jiān)督的情況下上路行駛的車輛必須具備全新形式的保護(hù)措施。這需要精心制定法規(guī)、規(guī)定性能指標(biāo),并且需要建立認(rèn)證體系,確保在人類駕駛員無(wú)法接管所謂的“自動(dòng)駕駛”汽車的情況下,這項(xiàng)技術(shù)不會(huì)危及公眾的安全。
蘭德公司(RAND Corporation)日前發(fā)布了一份自動(dòng)駕駛安全衡量框架的報(bào)告,呈現(xiàn)了在不同環(huán)境(模擬、封閉場(chǎng)地、公共道路,有、無(wú)安全駕駛員)中針對(duì)不同階段(開(kāi)發(fā)、驗(yàn)證和部署)可以采用的安全衡量方法,同時(shí)提出以下主要建議:
·在自動(dòng)駕駛汽車積累的公共道路行駛里程尚不具備統(tǒng)計(jì)學(xué)意義的階段,應(yīng)將發(fā)生的安全事件作為案例進(jìn)行研究。通過(guò)案例研究獲取的信息可供汽車產(chǎn)業(yè)、政策制定者和公眾廣泛學(xué)習(xí)了解。
·考慮到汽車產(chǎn)業(yè)和政府機(jī)構(gòu)可能需要進(jìn)行更深入的學(xué)習(xí)和了解,建議擬定一份有關(guān)信息共享的協(xié)議。協(xié)議必須要對(duì)衡量指標(biāo)、格式、具體情境、頻率、監(jiān)管、數(shù)據(jù)安全等因素做出準(zhǔn)確說(shuō)明。
·針對(duì)設(shè)計(jì)運(yùn)行區(qū)域 (operational design domains) 建立統(tǒng)一的分類體系可以促進(jìn)相互之間的理解和溝通。若能據(jù)此明確何時(shí)、何地、在何種環(huán)境下可以運(yùn)行自動(dòng)駕駛汽車,并且注明最低風(fēng)險(xiǎn)條件,就能夠在不同企業(yè)之間、以及企業(yè)與消費(fèi)者和監(jiān)管機(jī)構(gòu)之間實(shí)現(xiàn)良好的溝通。這也將有助于對(duì)自動(dòng)駕駛汽車從開(kāi)發(fā)到部署的整個(gè)過(guò)程進(jìn)行跟蹤。
·鑒于自動(dòng)駕駛系統(tǒng)會(huì)通過(guò)頻繁更新來(lái)不斷完善,需要針對(duì)如何衡量和宣傳自動(dòng)駕駛汽車系統(tǒng)的安全性展開(kāi)研究。自動(dòng)駕駛汽車的安全衡量指標(biāo)必須要既能反映現(xiàn)有的系統(tǒng)安全級(jí)別,也能體現(xiàn)近來(lái)的(可能也包括更早之前的)安全記錄,在二者之間達(dá)到一種平衡。
由于自動(dòng)駕駛的數(shù)據(jù)基本都掌握在少數(shù)企業(yè)手中,導(dǎo)致能夠面向公眾公開(kāi)或者在企業(yè)和政府間共享的數(shù)據(jù)量非常有限。自動(dòng)駕駛廠商能否與公眾進(jìn)行更充分的溝通對(duì)于自動(dòng)駕駛汽車的公眾接受度具有重要影響。公眾需要增進(jìn)對(duì)自動(dòng)駕駛汽車的性能特點(diǎn)、測(cè)試方式、行為特征等方面的了解,這需要各自動(dòng)駕駛廠商在介紹開(kāi)發(fā)進(jìn)展和車輛性能時(shí)能夠坦誠(chéng)相見(jiàn),而不是用精心剪輯的視頻或是花哨的公關(guān)文件盡可能地美化自身技術(shù)。
加州是自動(dòng)駕駛廠商的聚集地,截至2019年1月28日,已有62家自動(dòng)駕駛廠商獲得加州公共道路測(cè)試牌照。CDMV要求各廠商提供年度自動(dòng)模式解除報(bào)告和事故10日之內(nèi)報(bào)告,本意是為公眾提供了解自動(dòng)駕駛的信息渠道,而且不斷要求各廠商提高技術(shù)透明度。反觀國(guó)內(nèi),已有10余座城市開(kāi)放自動(dòng)駕駛公共道路測(cè)試權(quán)限,近20家汽車廠商和互聯(lián)網(wǎng)公司取得了測(cè)試牌照,但除了各企業(yè)的公關(guān)營(yíng)銷文件,尚未有向公眾公開(kāi)的自動(dòng)駕駛測(cè)試信息。
-
自動(dòng)駕駛汽車
+關(guān)注
關(guān)注
4文章
380瀏覽量
41222 -
waymo
+關(guān)注
關(guān)注
2文章
313瀏覽量
25075
原文標(biāo)題:從加州自動(dòng)駕駛測(cè)試報(bào)告看自動(dòng)駕駛汽車的安全衡量方法
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛安全基石:ODD
《汽車駕駛自動(dòng)化分級(jí)》會(huì)更適合中國(guó)自動(dòng)駕駛發(fā)展嗎?

新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車# 京東自動(dòng)駕駛快遞車
NVIDIA Halos自動(dòng)駕駛汽車安全系統(tǒng)發(fā)布
理想汽車推出全新自動(dòng)駕駛架構(gòu)
自動(dòng)駕駛的未來(lái) - 了解如何無(wú)縫、可靠地完成駕駛

NVIDIA DRIVE技術(shù)推動(dòng)自動(dòng)駕駛發(fā)展
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
自動(dòng)駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論