 基于三維模型進行輸電線路設計
基于三維模型進行輸電線路設計
一、項目背景
數字化三維設計是新一代智能設計平臺的基礎,目前我國各行各業均廣泛、深入的應用三維設計技術。2017年開始,國家電網公司與南方電網公司共同力推數字化三維設計技術在電力工程中全面應用。未來,以三維設計為核心的數字化設計,將成為貫穿電力工程全過程、全生命周期的主軸線。
無人機中、低空數據采集技術作為空間數據獲取的一項重要手段,具有續航時間長、飛行成本低、數據分辨率高、調度機動靈活等優點,可實現數據實時傳輸,并可進入高危地區探測,是衛星遙感與傳統航空攝影測量的有力補充。[1]
本文利用飛馬智能航測系統進行航空攝影測量,采集擬建輸電線路走廊影像數據,制作實景三維模型,并導入三維設計平臺中[1]。基于三維模型進行輸電線路設計,將極大提高設計可視化程度,并能精確量測地物與線路的空間距離,優化線路路徑。
1.1無人機航測系統
本文采用飛馬D1000智能航測系統,D1000是飛馬機器人推出的一款基于旋翼無人機平臺的一體化智能航測系統;系統基于無人機管家iPad版,支持正射、條帶、傾斜、環繞、全景多種作業模式的專業航線設計與全自動飛行控制功能;整合無人機管家專業版軟件,在其穩健的空三解算、控制點測量、一鍵成圖等支持下,針對旋翼相機優化算法,實現大比例尺精度應用,并提供DSM、真正射、三維模型等多種成果。
1.2工程概況
邢西~臨泉π入龍泉220kV線路工程位于太行山東部丘陵地區,起自新建龍泉220kV變電站,止于邢西~臨泉220kV線路東、西破口點,形成龍泉~邢西220kV線路和龍泉~臨泉220kV線路。
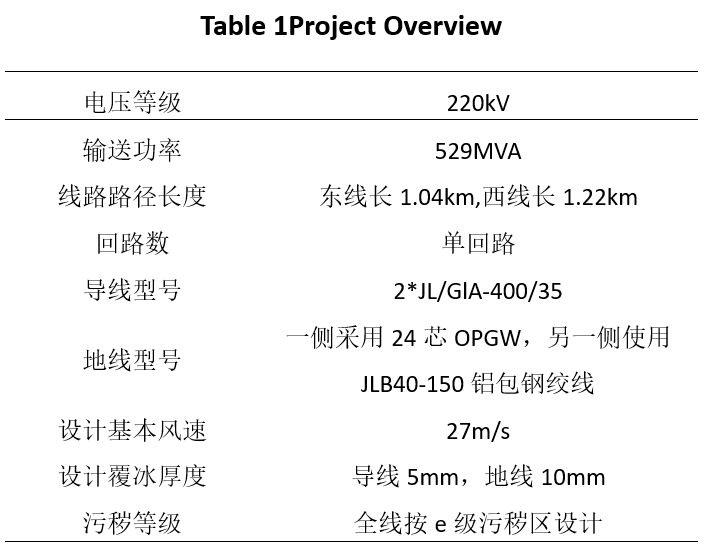
表1 工程概況
Table1Project Overview
二、技術路線圖
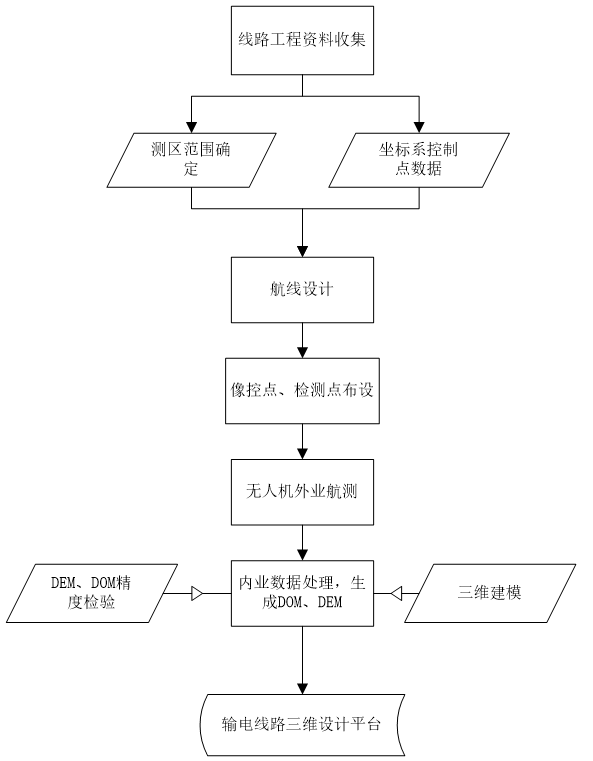
三、作業流程
3.1航線設計
針對本工程線路走向,為完全覆蓋兩條線路兩側各100m的線路走廊區域,測區宜設計為多邊形,如圖1所示。最低點高程279m,最高點高程308m,經計算得到測區平均高程為292m。根據規范要求,當航攝比例尺大于或等于1:7000時,測區內的地形高差一般不大于1/6相對航高,航攝設計指標如表1所示。
圖1 航線布設圖
Fig. 1 Route layout
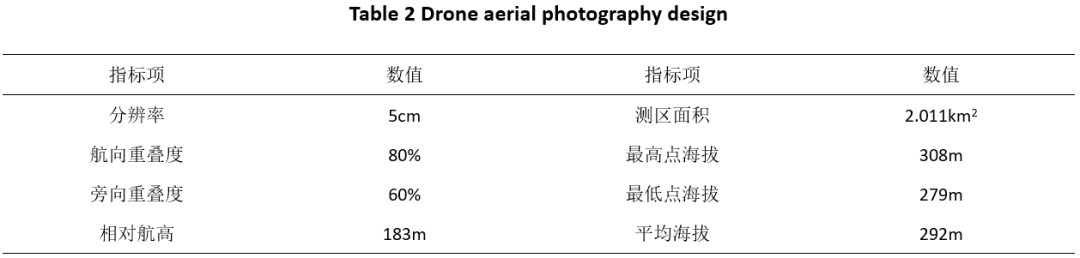
表2 無人機航攝設計
Table 2 Drone aerial photography design
3.2像控點布設
由于本工程設計采用的坐標系為西安80,而無人機航攝系統自帶坐標系為WGS84,故需要布設像控點轉換坐標系。像控點的精度和數量直接影響到航測數據后處理的精度,所以像控點的布設和選擇應當盡量規范、嚴格、精確。本次像控點布設采用噴漆法布設像控點7個,并使用GPS采集點坐標數據(西安80)。像控點分布如圖2所示。
圖2 像控點分布圖(藍線為線路走向)
Fig. 2 control point distribution map (blue line isthe line direction)
四、輸電線路走廊實景建模
利用航空影像數據為數據源,采用影像匹配彩色點云數據技術和三維網格優化算法,實現自動三維建模、紋理映射、連接點重構紋理和重建約束,建立輸電線路走廊三維模型[3]。
4.1 三維建模流程
使用航攝影像處理軟件,對采集的航攝相片進行預處理,對影像進行勻光和降噪。之后根據影像的航向和旁向重疊數據,將相片拼接為整副影像。利用無人機航飛拍攝的POS數據與地面像控點坐標,進行空三校正,將影像坐標系由WGS84轉為本工程所需的西安80坐標系。最后通過影像匹配點云,TIN三角建模及紋理貼附,生成三維影像模型,如圖3所示。
(a)影像匹配點云
(b)構建數字地表模型
(c)自動紋理貼圖
圖3 輸電線路走廊實景建模過程
Fig. 3 Transmission line corridor real-time modelingprocess
至此,三維實景模型中的地物只有空間信息,沒有屬性信息。因此,需要賦予道路、樹木、房屋、交跨線等地物屬性信息,從而可以在線路選線過程中實現空間距離量算。
圖4 交跨地物信息標繪
Fig. 4 Cross-land feature information plotting
4.2 三維模型精度分析
本工程在航飛前,采集了輸電線路5基塔塔位作為航飛精度檢測點。像控點校正方面,中誤差在±0.01m。經檢測點檢測結果對比,三維模型中平面中誤差在±0.05~0.1m之間,高程中誤差在±0.1~0.2m之間。根據《220kV及以下架空送電線路勘測技術規程》要求,本次測量精度滿足設計深度規定。
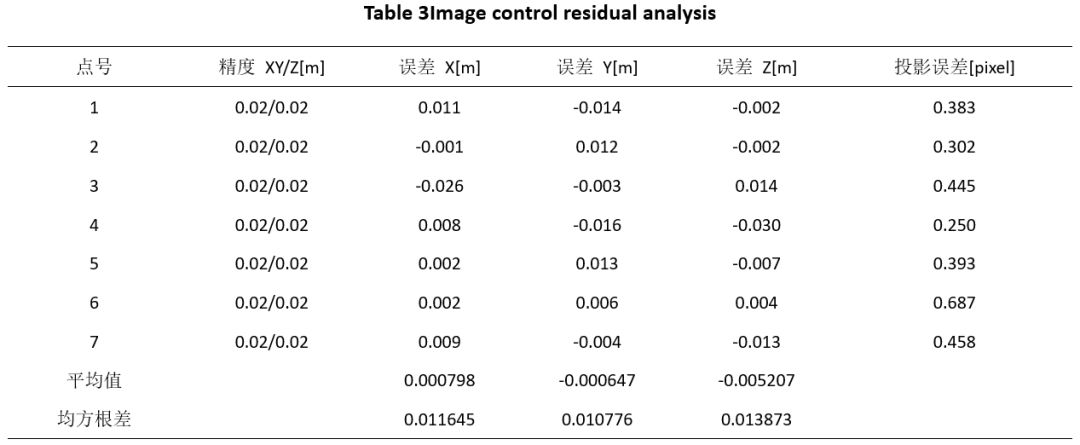
表3 像控點殘差分析
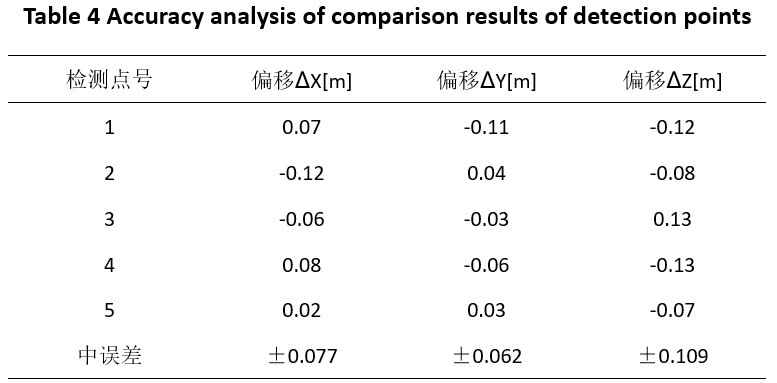
表4 檢測點對比結果精度分析
五、工程應用與精度分
5.1地物標繪精度比對分析
由于本工程在開展三維設計之前,已完成全線祥測工作。因此,將人工測量成果中的樹木、道路、房屋等交跨地物與三維模型進行比對分析,即可得出三維模型中地物標繪的精度。
(a)已有塔基位置對比
(b)房屋標繪位置對比
(c)道路標繪位置對比
圖5 地物標繪對比(紅色為實測數據)

將三維模型中標繪的地物與實測數據對比,如圖5所示,比對結果如表5所示。由此可以看出,除無法識別的地物外,考慮兩種測量方式存在對地物邊界定義不完全一致的因素,可以認為三維模型中的地物精度能夠滿足初設要求。
5.2空間距離量算
在三維場景中,基于BIM技術對輸電線路的塔、線、串進行三維建模,可以真實模擬輸電線路走廊場景,如圖6所示。依據《110kV~750kV架空輸電線路設計規范》中對于220kV架空輸電線路的安全距離規定(表4),便可以對輸電線路走廊內的交跨地物進行空間距離量測,對輸電線路走廊內的居民地、建筑、樹木等交叉跨越物進行精確的空間距離量測,并對不滿足安全距離的區段進行報警提示,如圖7所示。
圖6 三維場景中的塔、線、串模型
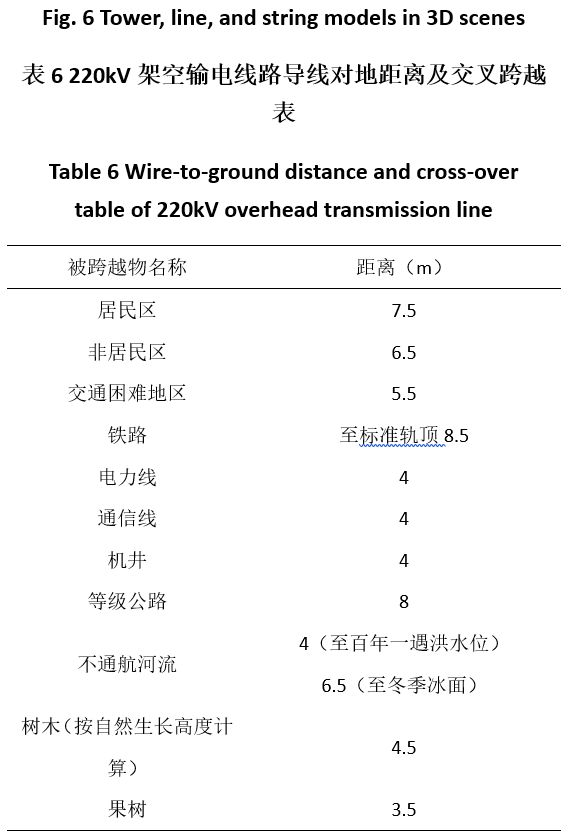
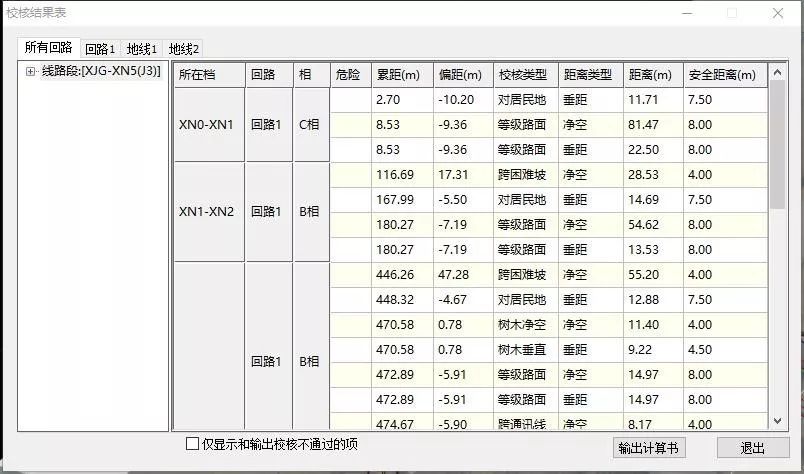
圖7 三維空間距離精確校驗
Fig. 7 Accuratecalibration of three-dimensional space
六、效果評價
隨著國家電網公司基建部2018【585】號文的頒布,所有新建35kV及以上電壓等級輸變電工程均要求采用三維設計手段開展設計工作。通過無人機航測獲取線路走廊DOM與DEM,是輸電工程開展三維設計的前提。本文利用飛馬無人機D1000航測系統對輸電線路走廊進行數字化三維建模,真實還原架空輸電線路工程實景模型,為輸電線路路徑優化與交跨地物的空間距離量算提供了數據支撐。將本次研究成果與實測結果對比,可總結出利用飛馬航測系統開展輸電線路三維設計的優勢如下。
(1)飛馬無人機操控及數據處理流程簡單快捷,易上手,新手經過半天培訓即可開展獨立作業(2)航測數據覆蓋面積廣,數據獲取速度快,即使線路路徑發生變動也無需重測,方便開展路徑優化工作。(3)基于DOM及DEM調繪沿線地物,可大量減輕傳統人工測量工作量。以本工程為例,傳統測量需2個工作日,而采用航測僅需1小時。(4)對于沿線需砍伐或高跨的樹木,由于人工測量只標注行距與株距,而航攝影像可以清楚辨別單棵樹木,因此航測手段對樹木數量的統計更精準。
-
輸電線路
+關注
關注
1文章
656瀏覽量
23490 -
數字化
+關注
關注
8文章
9247瀏覽量
63052
原文標題:飛馬智能航測系統助力輸電線路三維設計
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

輸電線路簡易球機監控裝置的結構配置與功能
輸電線路人工巡檢成本高?輸電線路視頻監測設備降本增效新選擇

輸電線路“樹線矛盾”激光雷達點云監測裝置方案解析
全景圖像監拍儀:輸電線路的“智能眼睛”如何守護電網

電網背后的 “守護傳奇”:輸電線路舞動隱患在線監測裝置顯神通

輸電線路的主要組成部件有哪些

輸電線路激光防外破在線監測裝置:如何“慧眼識險”?
輸電線路雷擊跳閘的原因剖析及輸電線路防雷措施介紹
泰克示波器在高壓輸電線路檢測中的應用與優勢






 工商網監
工商網監
評論