") ABB機器人如何與相機詳細方法通訊圖文講解
ABB機器人如何與相機詳細方法通訊圖文講解

ABB機器人如何與相機通訊
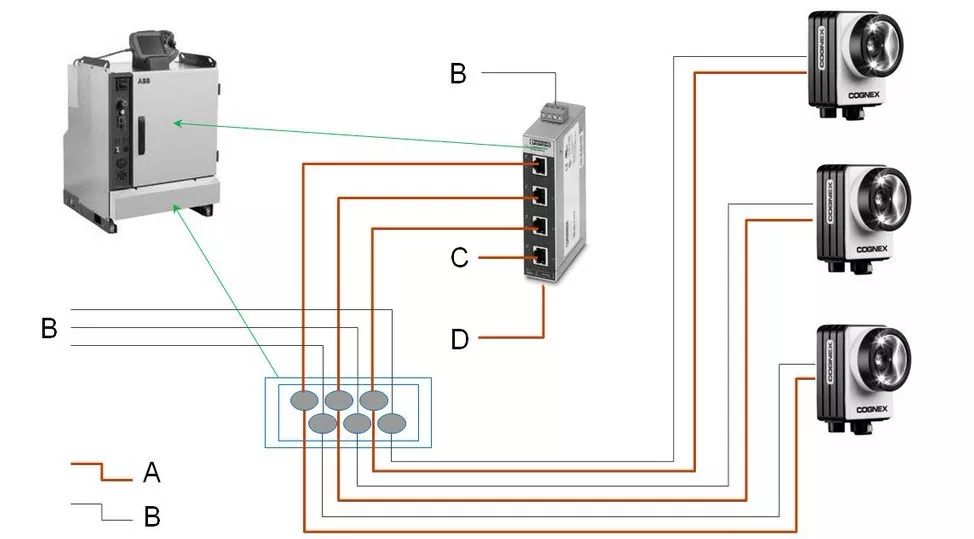
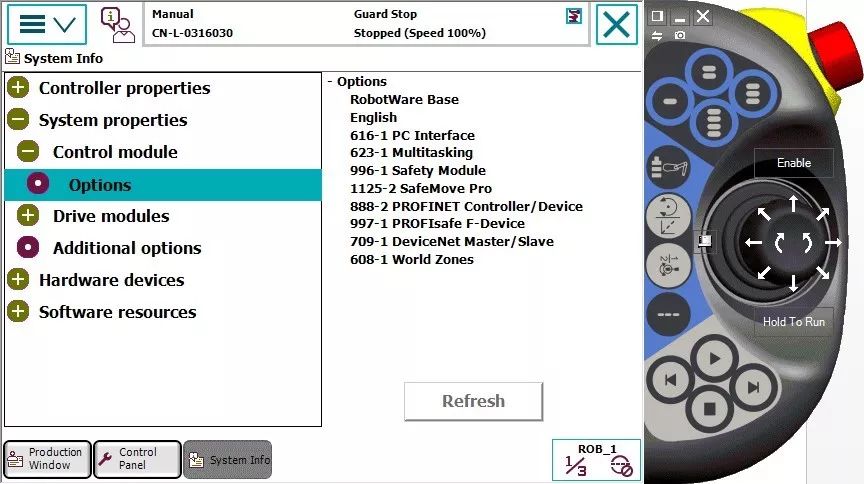
1)機器人與相機一般采用socket通訊(TCP/IP)。所以機器人需要有pc-interface選項。
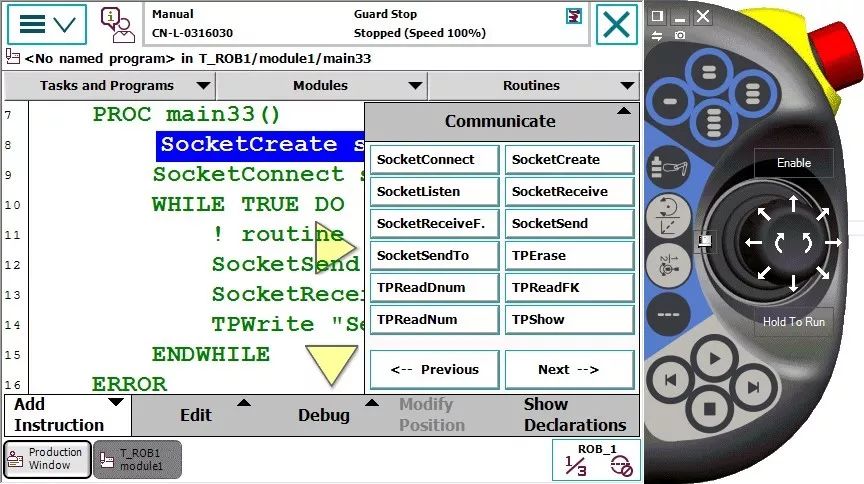
2)機器人一般做client,在示教器-程序編輯器,添加指令-communicate下找到SocketCreate,如下圖:
3)下圖為機器人做client與相機通訊的一般步驟:
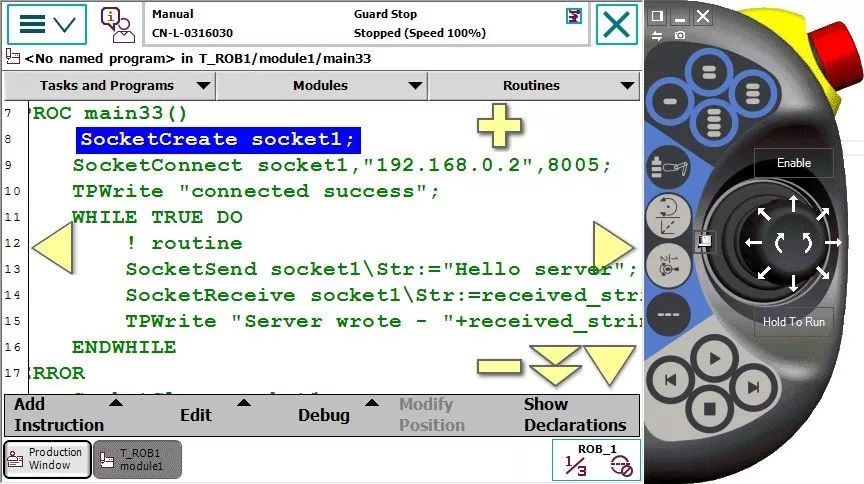
SocketCreate socket1; //創(chuàng)建套接字
SocketConnect socket1,"192.168.0.2",8005; //連接server,這里需要設(shè)置server的ip和端口。
TPWrite "connected success" ;//連接成功后輸出信息
WHILE TRUE DO
!routine
SocketSend socket1Str:="Hello server";//向server發(fā)送請求
SocketReceivesocket1Str:=received_string;//從server接受數(shù)據(jù)字符串,并存儲到received_string字符串
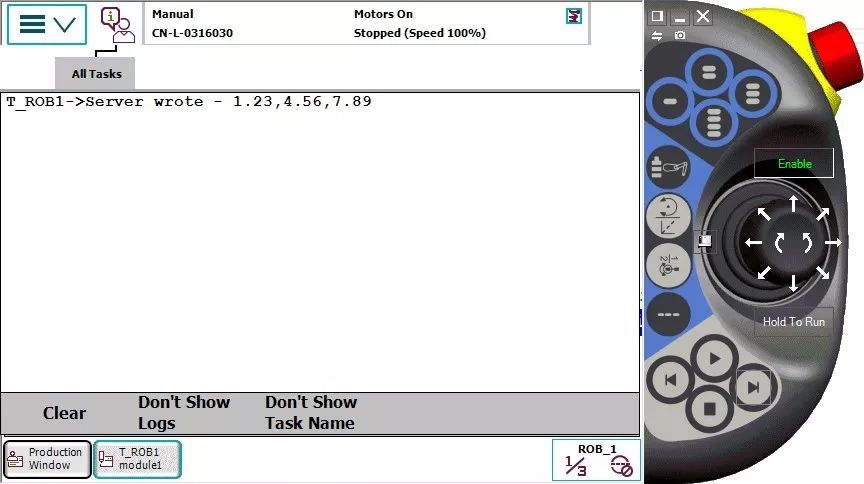
TPWrite "Server wrote- "+received_string;//寫屏收到的字符串
END WHILE
4)如果通訊成功,機器人就能收到相機發(fā)送過來的字符串,舉例如下,即x偏量1.23,y偏量4.56,角度7.89。
快去試試你的機器人能不能連上相機吧!
-
機器人
+關(guān)注
關(guān)注
213文章
29615瀏覽量
212192 -
TCP
+關(guān)注
關(guān)注
8文章
1401瀏覽量
80656 -
ABB
+關(guān)注
關(guān)注
26文章
560瀏覽量
54096
原文標題:圖文詳解ABB機器人如何與相機通訊
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
ABB IRB5400-噴涂工業(yè)機器人
請教各位Labview與ABB機器人怎么進行Profinet通訊
ABB焊接機器人問題
ABB機器人與單片機的數(shù)字通訊
請問各位老哥:stm32直接can總線連接devicenet與abb機器人通訊可行?
青島ABB工業(yè)機器人無法正常進入系統(tǒng)故障維修
ABB機器人維修保養(yǎng)指南
ABB機器人實訓平臺實驗
基于ABB機器人的應用協(xié)議RAP

ABB機器人的CCLink配置詳細資料說明







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論