") 使用加速度計實現(xiàn)傾斜角度計算
使用加速度計實現(xiàn)傾斜角度計算
手機現(xiàn)在通常會在用戶旋轉(zhuǎn)手機時更改屏幕方向。本文討論了將加速度計的輸出轉(zhuǎn)換為傾斜角度的基本原理和所需計算。
確定系統(tǒng)傾斜或傾斜度的一種常用方法是集成陀螺儀的輸出。盡管這種方法很簡單,但與零偏置穩(wěn)定性相關(guān)的誤差會隨著積分周期的增加而迅速復合,即使在器件靜止時也會導致明顯的旋轉(zhuǎn)。
在某些應(yīng)用中,系統(tǒng)上的凈加速度或力量時間是重力,加速度計可用于測量靜態(tài)傾斜角度或傾斜度。這些應(yīng)用包括游戲,數(shù)碼相機中的地平線檢測,以及檢測工業(yè)和醫(yī)療應(yīng)用中設(shè)備的前進方向。
使用加速度計進行傾斜感應(yīng)的基本假設(shè)是唯一的加速度刺激是與重力相關(guān)的刺激。在實踐中,可以對信號輸出執(zhí)行信號處理以從輸出信號中去除高頻內(nèi)容,因此可以容忍一些AC加速度。
傾斜感應(yīng)使用重力矢量及其在加速度計軸上的投影,確定傾斜角度。由于重力是直流加速度,因此任何導致額外直流加速度的力都會破壞輸出信號并導致計算錯誤。 DC加速度的來源包括車輛以恒定速率加速的時間段和旋轉(zhuǎn)在加速度計上引起向心加速度的裝置。此外,當重力投影在感興趣的軸上時,通過重力旋轉(zhuǎn)加速度計會引起明顯的AC加速度。在計算傾斜度之前對加速度信號進行任何濾波會影響輸出結(jié)束到新靜態(tài)值的速度。本文討論將加速度計輸出轉(zhuǎn)換為傾斜角度的基本原理。該討論包括如何計算單軸,雙軸或三軸解的理想傾角。此外,還包括一些有關(guān)校準的基本信息,以減少偏移和靈敏度不匹配的誤差。
傾斜/傾斜計算
單軸傾斜計算
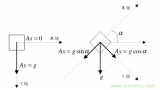
在僅需要有限角度的傾斜感應(yīng)的應(yīng)用中,并且具有稍微粗略的分辨率,可以使用單軸設(shè)備(或多軸設(shè)備的單軸)。例如,在圖1中,單個軸(在該示例中為x軸)是通過重力旋轉(zhuǎn)。因為該方法僅使用單個軸并且需要重力矢量,所以計算的傾斜角度僅在設(shè)備被定向時使得x軸始終在重力平面中才是準確的。圍繞其他軸的任何旋轉(zhuǎn)都會減小x軸上加速度的大小,并導致計算出的傾斜角度出現(xiàn)誤差。

圖1:用于傾斜感應(yīng)的單軸。
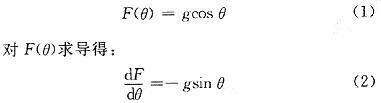
參考基本三角學,重力矢量在x軸上的投影產(chǎn)生的輸出加速度等于加速度計x軸和地平線之間的角度的正弦。地平線通常被認為是與重力矢量正交的平面。對于重力的理想值1 g,輸出加速度為:

使用單軸解決方案時,請注意靈敏度 - 即某些變化的輸出變化在輸入中 - 傾斜度計算隨著水平線和x軸之間的角度增加而減小,當角度接近±90°時接近零。這可以在圖2中看到,其中輸出加速度(以g為單位)相對于傾斜角繪制。在±90°附近,傾斜角度的大幅變化會導致輸出加速度的微小變化由于傾斜計算是以數(shù)字方式完成的,因此輸出加速度表示為每個最低有效位(LSB)或代碼的恒定加速度,可從模數(shù)轉(zhuǎn)換器(ADC)或直接從數(shù)字輸出部件獲得。由于輸出分辨率是恒定加速度,因此傾斜度的分辨率是可變的,最佳分辨率接近0°,最差分辨率為±90°。
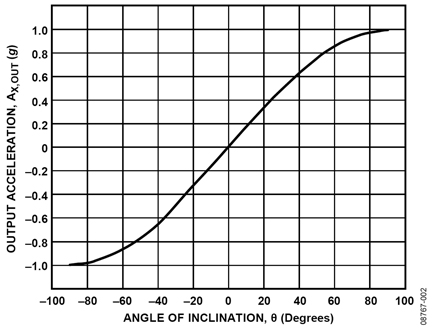
圖2:輸出加速度與單軸傾斜傳感的傾斜角度。圖3和圖4顯示了1°和0.25°傾斜角度步進的增量靈敏度。增量靈敏度是輸出變化,以毫克表示,每個傾斜角度步長,或者
其中:
N是當前角度。
P是步長。
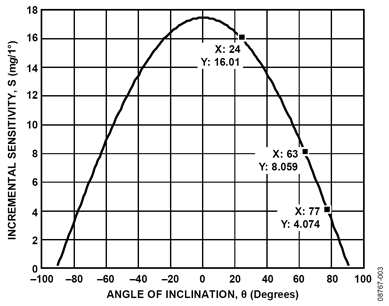
圖3:1°步長的增量傾斜靈敏度。
這些曲線可用于確定測量輸出加速度時所需的最小分辨率,以滿足整個所需的傾斜分辨率應(yīng)用范圍。例如,設(shè)計最大步長為1°時,±63°范圍內(nèi)至少需要8 mg/LSB的分辨率。類似地,要在±63°的范圍內(nèi)實現(xiàn)0.25°的最大步長,需要至少2 mg/LSB的分辨率。請注意,如果存在足夠的任何一個,則可以使用過采樣來實現(xiàn)更好的分辨率。
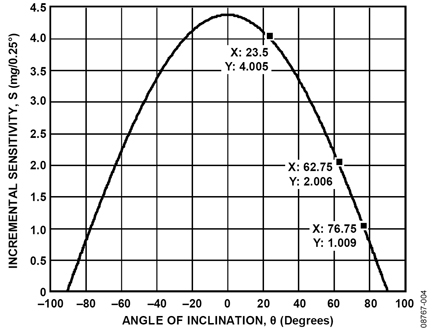
圖4:0.25°步長的增量傾斜靈敏度。
因為加速度計的輸出服從正弦曲線當它通過重力旋轉(zhuǎn)時,從加速度到角度的轉(zhuǎn)換是使用反正弦函數(shù)完成的,

其中傾角θ是弧度。
如果是窄的需要傾斜范圍,可以使用線性近似來代替反正弦函數(shù)。線性近似與小角度的正弦近似有關(guān),

其中傾角θ為弧度。

其中傾角θ為弧度。
轉(zhuǎn)換為度數(shù)是通過將等式5的結(jié)果乘以(180/π)。圖5顯示了使用反正弦函數(shù)和k等于1的線性近似之間的比較。隨著傾角的大小增加,線性逼近開始失敗,并且計算的角度偏離實際角度。
因為計算出的角度是相對于實際傾斜角度繪制的,所以線性近似似乎在末端附近彎曲。這是因為線性近似僅在與輸出加速度相比時是線性的,并且如圖2所示,輸出加速度的行為類似于實際傾斜角度增加。但是,反正弦函數(shù)應(yīng)該產(chǎn)生與實際傾斜角度一對一的輸出,使得計算出的角度在與實際傾斜角度作圖時是一條直線。
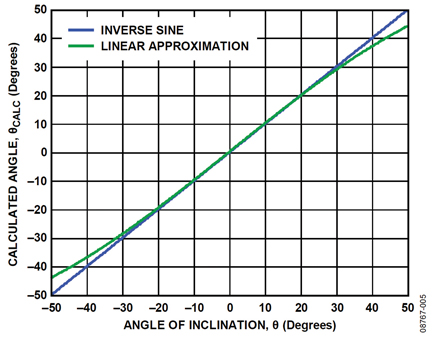
圖5:傾斜角計算的反正弦函數(shù)和線性近似的比較
例如,如果傾斜感應(yīng)的所需分辨率為1°,則誤差為±0.5°是可接受的,因為它低于舍入誤差的計算。如果在k等于1時繪制實際傾斜角度與計算出的傾斜角度之間的誤差,如圖6所示,線性近似的有效范圍僅為±20°。如果調(diào)整比例因子使得誤差最大化,但保持在計算舍入限制內(nèi),則線性近似的有效范圍增加到大于±30°。
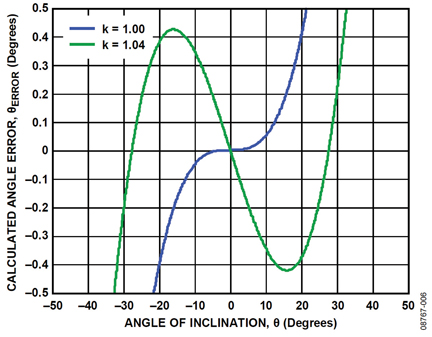
圖6:計算角度不同比例因子的誤差。
雙軸傾斜計算
單軸傾斜檢測的一個限制是需要高分辨率ADC或數(shù)字輸出來實現(xiàn)大范圍的有效傾角,如圖所示圖3和圖4.另一個限制是單軸測量不能提供360°測量,因為在傾斜度N°時產(chǎn)生的加速度與在180° - N°傾角下產(chǎn)生的加速度相同。 》對于某些應(yīng)用,這是可以接受的,但對于需要更高分辨率的應(yīng)用,或能夠在完整的360°弧中區(qū)分傾斜角度的能力,第二軸(如圖7所示)或第二傳感器是必要的。如果使用第二個傳感器,它應(yīng)該定向為第一個傳感器的傳感軸。
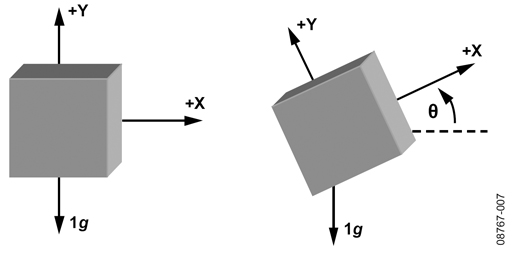
圖7:用于傾斜傳感的兩個軸。
包括三個主要好處確定傾斜角度的第二軸。以下各節(jié)介紹了這些優(yōu)點。
恒定靈敏度
使用第二軸的第一個主要好處是軸的正交性。如在單軸解決方案中,由x軸檢測的加速度與傾斜角度的正弦成比例。由于正交性,y軸加速度與傾斜角的余弦成比例(見圖8)。隨著一個軸的增量靈敏度降低,例如當該軸上的加速度接近+1 g或-1 g時,另一個軸的增量靈敏度會增加。
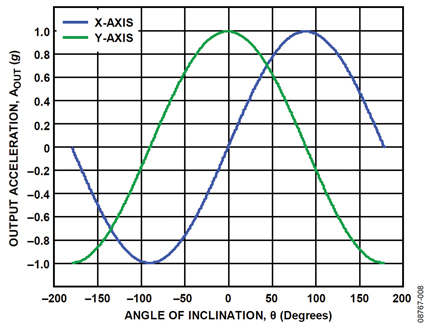
圖8:雙軸傾斜傳感的輸出加速度與傾斜角度的關(guān)系
將測量的加速度轉(zhuǎn)換為傾斜角度的一種方法是計算x軸的反正弦和反向y軸的余弦,類似于單軸解。但是,更簡單,更有效的方法是使用兩個值的比率,結(jié)果如下:


其中傾角, θ,以弧度為單位。
與單軸示例不同,使用兩個軸的比率來確定傾斜角度使得確定增量靈敏度非常困難。相反,在給定所需的傾斜分辨率的情況下,確定最小必要加速度計分辨率更有用。鑒于一個軸的增量靈敏度隨著另一個軸的減小而增加,最終結(jié)果是大致恒定的有效增量靈敏度。這意味著選擇具有足夠分辨率的加速度計以在一個角度上實現(xiàn)所需的傾斜步長對于所有角度都是足夠的。為了確定最小必要的加速度計分辨率,檢查等式6以確定分辨率限制的位置。因為每個軸的輸出依賴于傾斜角的正弦或余弦,并且每個函數(shù)的傾斜角度相同,所以最小可分辨角度對應(yīng)于最小可分辨加速度。
如圖3和圖3所示。如圖4所示,正弦函數(shù)在0°附近具有最大的變化率,并且余弦函數(shù)在此時具有最小的變化率。因此,在y軸上的加速度變化之前識別出由于傾斜變化引起的x軸加速度的變化。因此,系統(tǒng)在0°附近的分辨率主要取決于x軸的分辨率。為了檢測P°的傾斜度變化,加速度計必須能夠檢測到近似的變化:
圖9可用于確定最小必要加速度計分辨率 - 或最大加速度計量表factor - 對于所需的傾斜步長。請注意,增加的加速度計分辨率與加速度計比例因子的減少以及檢測輸出加速度的較小變化的能力相對應(yīng)。因此,當選擇具有適當分辨率的加速度計時,比例因子應(yīng)小于圖9中所示的預(yù)期傾斜步長的限制。
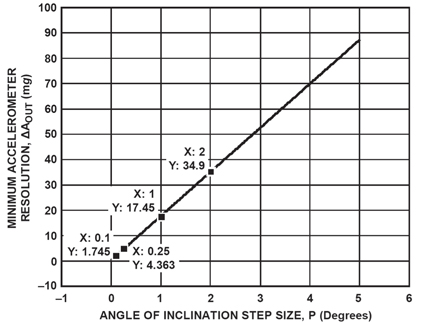
圖9:所需角度的最小加速度計分辨率傾斜分辨率的降低。
減少與重力平面對齊的依賴性 - 使用至少兩個軸的第二個主要好處是,與單軸解決方案不同,在x軸以外的任何軸上傾斜都會導致即使存在第三軸的傾斜,使用第二軸也可以測量精確的值。這是因為有效的增量靈敏度與感興趣的軸上的重力的和 - 平方(RSS)值成正比。
當重力完全包含在xy平面中時,檢測到的加速度的RSS值軸理想地等于1克。如果在xz或yz平面中存在傾斜,則由于重力引起的總加速度減小,這也降低了有效的增量靈敏度。反過來,這增加了給定加速度計分辨率的傾斜步長,但仍提供精確的測量。從傾斜度計算得到的角度對應(yīng)于xy平面中的旋轉(zhuǎn)。
如果系統(tǒng)足夠傾斜,使得在xy平面中由于重力引起的加速度非常小,則傾斜角度步長將為太粗糙而無用。因此,建議限制xz或yz平面的傾斜完整的360°傾斜感應(yīng)
使用第二個軸的第三個主要好處是能夠區(qū)分每個象限并測量整個360°弧的角度。如圖10所示,每個象限都有一個與x軸和y軸加速度相關(guān)的不同符號組合。
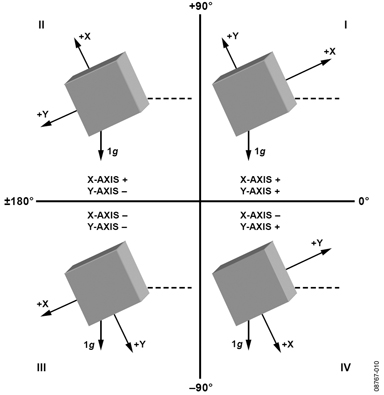
圖10:象限檢測的傾斜角度和加速度符號。 》如果操作數(shù)AX,OUT/AY,OUT為正,則反正切函數(shù)在象限I中返回一個值;如果操作數(shù)為負,則反正切函數(shù)返回象限IV中的值。因為象限II中的操作數(shù)是負數(shù),所以當角度在該象限中時,應(yīng)該在計算結(jié)果中添加180°的值。
因為象限III中的操作數(shù)是正的,所以180°的值應(yīng)該是當角度在該象限中時,從計算結(jié)果中減去。計算出的角度的正確象限可以通過檢查每個軸上測量的加速度的符號來確定。
三軸傾斜計算
當引入第三個軸時,傳感器的方向可以在完整的球體。矩形(x,y,z)到球面(ρ,θ,φ)轉(zhuǎn)換的經(jīng)典方法可用于將xy平面中的傾斜角度θ與來自重力矢量的傾斜角度相關(guān)聯(lián),φ ,對于每個軸的測量加速度,如下:


假設(shè)唯一測量的加速度是由重力引起的,分母是等式10中的操作數(shù)可以用常數(shù)替換,理想情況下為1,因為當唯一的加速度是重力時,所有軸的RSS值是恒定的。角度如圖11所示,其中圖11c僅顯示xy平面中的θ,圖11d顯示φ為z軸和重力矢量之間的角度。
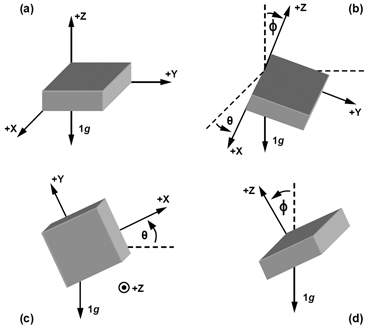
圖11:球面坐標系的角度。由于三軸方程的方程與單軸和雙軸方程的方程式之間的相似性,三軸解的分析與單個方法相同。 - 和雙軸方法相結(jié)合。根據(jù)兩個正交軸的比率測量θ的好處,以及所需的傾斜分辨率需要最小的加速度計分辨率,如公式8所述。
φ的測量值對應(yīng)于單軸解決方案的傾角測量值以及用于確定在期望范圍內(nèi)的特定傾斜角分辨率所需的最小加速度計分辨率的方法。不同之處在于使用反余弦函數(shù)確定φ導致最大增量靈敏度,當φ為90°且最小增量靈敏度為0°和180°時。
類似于圖3和圖4的曲線可以是通過在等式2中用余弦代替正弦來生成。重要的是要注意,盡管θ的范圍是-180°到+ 180°,但φ的范圍僅為0°到180°。 φ的負角度會導致θ的角度變?yōu)樨撝怠?/p>
使用三個軸進行傾斜感應(yīng)的另一種方法是從參考位置單獨確定加速度計的每個軸的角度。參考位置被視為設(shè)備的典型方向,其中x軸和y軸在地平線的平面中(0g場)和z軸與地平線(1g場)正交。這在圖12中示出,其中θ是加速度計的地平線和x軸之間的角度,ψ是加速度計的地平線和y軸之間的角度,并且φ是重力矢量和z軸。當在x軸和y軸上的初始位置0 g和z軸上的1 g時,所有計算的角度都將是0°。
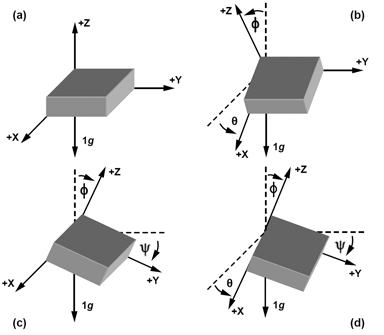
圖12:獨立傾斜感應(yīng)的角度。
基本三角法可用于顯示傾角可以使用公式11,公式12和公式13計算。
公式13中操作數(shù)的明顯反轉(zhuǎn)是由于初始位置是1 g字段。如果希望地平線作為z軸的參考,則可以反轉(zhuǎn)操作數(shù)。正角度意味著加速度計的相應(yīng)正軸指向地平線以上,而負角度意味著軸指向地平線以下。因為使用反正切函數(shù)和加速度比率,所以提到的好處在雙軸示例中應(yīng)用,即有效增量靈敏度是恒定的,并且可以精確測量單位球體周圍所有點的角度。
校準偏移和靈敏度不匹配誤差
應(yīng)用筆記是在假設(shè)使用理想的加速度計的情況下完成的。這對應(yīng)于沒有0 g偏移且具有完美靈敏度的設(shè)備(對于模擬傳感器表示為mV/g,對于數(shù)字傳感器表示為LSB/g)。盡管傳感器經(jīng)過修整,但這些設(shè)備本質(zhì)上是機械的,這意味著系統(tǒng)組裝后零件上的任何靜態(tài)應(yīng)力都可能影響偏移和靈敏度。這與工廠校準的限制相結(jié)合,可能導致超出應(yīng)用允許極限的誤差。
偏移誤差的影響
為了證明誤差有多大,首先想象一下完美的雙軸解決方案靈敏度,但在x軸上偏移50毫克。在0°時,x軸讀數(shù)為50mg,y軸讀數(shù)為1g。得到的計算角度為2.9°,導致誤差為2.9°。在±180°時,x軸將報告50 mg,而y軸將報告-1 g。這將導致計算出的角度和-2.9°的誤差。對于該示例,計算出的角度與實際角度之間的誤差如圖13所示。由于偏移引起的誤差不僅可以與系統(tǒng)的期望精度相比較大,而且可以變化,因此難以簡單地校準誤差角。當包含多個軸的偏移時,這變得更加復雜。
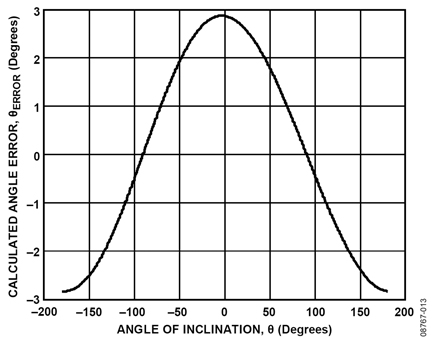
圖13:由加速度計偏移引起的計算角度誤差。
靈敏度不匹配誤差的影響
主要誤差分量由于雙軸傾斜感應(yīng)應(yīng)用中的加速度計靈敏度是指感興趣的軸之間存在靈敏度差異(與單軸解決方案相反,其中實際靈敏度與預(yù)期靈敏度之間的任何偏差導致誤差)。因為使用了x軸和y軸的比率,所以如果靈敏度相同,則大部分誤差被消除。
作為加速度計靈敏度不匹配的影響的示例,假設(shè)使用雙軸解決方案具有完美的偏移調(diào)整,在y軸上具有完美的靈敏度,在x軸上具有+ 5%的靈敏度。這意味著在1g場中,y軸報告1g,而x軸報告1.05g。圖14顯示了由于此靈敏度不匹配導致的計算角度誤差。與偏移誤差類似,由于加速度計靈敏度不匹配引起的誤差在整個旋轉(zhuǎn)范圍內(nèi)變化,使得在計算傾斜角度之后難以補償誤差。通過改變y軸靈敏度進一步減少不匹配會導致更大的誤差
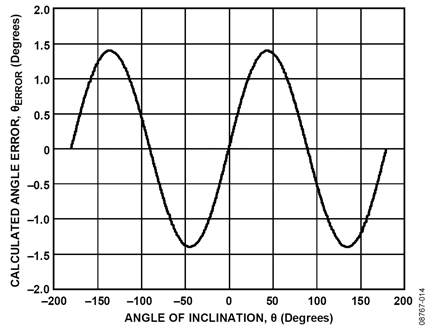
圖14:由于加速度計靈敏度不匹配導致的計算角度誤差。
基本校準技術(shù)
當組合由于偏移和靈敏度不匹配引起的誤差時,誤差會變得非常大,遠遠超出可接受范圍傾斜傳感應(yīng)用中的限制。為減少此誤差,應(yīng)校準偏移和靈敏度,并使用校準的輸出加速度計算傾斜角度。當包括偏移和靈敏度的影響時,加速度計輸出如下:

其中:
AOFF是偏移誤差,以g為單位。
增益是增益加速度計,理想情況下值為1.
AACTUAL是加速度計上的實際加速度和所需的值,以g表示。
簡單的校準方法是假設(shè)增益為1并測量偏移量。然后,該校準將系統(tǒng)的精度限制為未校準的靈敏度誤差。可以通過將感興趣的軸放入0g場并測量輸出來完成簡單的校準方法,輸出將等于偏移。然后,在處理信號之前,應(yīng)從加速度計的輸出中減去該值。這通常被稱為不轉(zhuǎn)彎或單點校準,因為設(shè)備的典型方向?qū)軸和y軸置于0 g場中。如果使用三軸設(shè)備,則z軸應(yīng)包含至少一個轉(zhuǎn)彎點或第二個點。
更準確的校準方法是每個感興趣的軸使用兩個點(三個點最多六個點) - 軸設(shè)計)。當軸放入+1 g和-1 g字段時,測量的輸出如下:
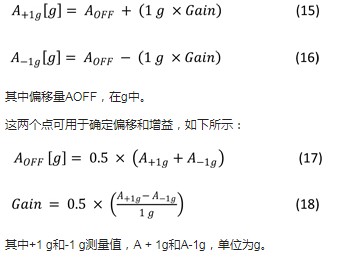
此類校準還有助于最小化橫軸靈敏度效應(yīng),因為當對感興趣的軸進行測量時,正交軸在0g場中。首先從加速度計測量值中減去偏移量,然后將結(jié)果除以增益,即可使用這些值。

其中AOUT和AOFF以g為單位。
AOFF的計算等式15至等式19中的增益假設(shè)加速度值A(chǔ) + 1g和A-1g以g為單位。如果使用以mg為單位的加速度,則公式17中AOFF的計算保持不變,但公式18中的增益計算應(yīng)除以1,000,以說明單位的變化。
-
DC
+關(guān)注
關(guān)注
10文章
3680瀏覽量
681108 -
AC
+關(guān)注
關(guān)注
1文章
590瀏覽量
85041 -
加速度計
+關(guān)注
關(guān)注
6文章
712瀏覽量
46586
發(fā)布評論請先 登錄
ADXL345三軸數(shù)字加速度計的驅(qū)動設(shè)計與實現(xiàn)
關(guān)于陀螺儀和加速度計的選擇問題
三軸加速度計算物體傾斜角度的算法及代碼實現(xiàn)
USB微機電加速度計
加速度傳感器如何測量物體的傾斜角度
如何利用SCA3000和LPC2210設(shè)計三軸傾斜角智能傳感器?
是否可以使用LIS2DW12加速度計進行傾斜角度檢測呢?
一種低g三軸加速度計的傾斜檢測理論和傾斜角測量方法
一種低g三軸加速度計的傾斜檢測理論和傾斜角測量方法
基于加速度傳感器計算物體垂直平面上的傾斜角度
如何通過加速度計來實現(xiàn)傾斜角度的計算
如何使用加速度計實現(xiàn)傾斜角度計算
基于三軸加速度計的傾斜角傳感器的研究與設(shè)計
加速度計輸出轉(zhuǎn)換為傾斜角度的基本原理

三軸加速度計LIS2DW12開發(fā)(4)----測量傾斜度





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論