") 利用Si9979Cs和MOSFET功率管實(shí)現(xiàn)數(shù)控直流電動(dòng)機(jī)伺服控制系統(tǒng)的設(shè)計(jì)
利用Si9979Cs和MOSFET功率管實(shí)現(xiàn)數(shù)控直流電動(dòng)機(jī)伺服控制系統(tǒng)的設(shè)計(jì)

1 、引言
無刷直流電機(jī)是一種近年來隨著電子技術(shù)的迅速發(fā)展而發(fā)展起來的一種新型伺服電機(jī)。 與直流電機(jī)比較,電機(jī)用換向電路取代換向器(整流子)和電刷組成的機(jī)械接觸結(jié)構(gòu),因此 沒有換向火花,不產(chǎn)生無線電干擾,壽命長,運(yùn)行可靠,維護(hù)簡便。而與交流伺服電機(jī)比較, 又具有控制簡單,價(jià)格低廉的特點(diǎn),因此在小型機(jī)電裝置中得到廣泛的應(yīng)用。本文研制了基 于數(shù)字控制器電動(dòng)機(jī)的伺服控制系統(tǒng)。
2 、電路總體方案設(shè)計(jì)
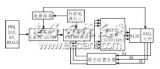
硬件電路可以分為三部分:主控電路模塊、功率驅(qū)動(dòng)電路模塊和電源模塊。主控電路模 塊以DSP 為核心,外圍電路主要包括:調(diào)試仿真接口電路、外部存儲(chǔ)器擴(kuò)展電路、串行通 信接口電路、CAN 總線接口、脈沖量、模擬量控制接口、數(shù)字模擬轉(zhuǎn)換電路和輸入輸出擴(kuò) 展借口。功率驅(qū)動(dòng)電路包括逆變器主電路、轉(zhuǎn)子位置檢測電路等。電源電路為系統(tǒng)提供多路 不同等級的直流電源。電路整體方案如圖1 所示。

3 、硬件電路詳細(xì)設(shè)計(jì)
本系統(tǒng)采用TI 公司的高性能的DSP 控制器TMS230LF2407APGE 作為控制核心,2407ADSP 控制器是專為電機(jī)控制的應(yīng)用而設(shè)計(jì)的。它將高性能的DSP 內(nèi)核和豐富的控制器外設(shè) 集成于單片中,從而成為傳統(tǒng)的微控制器單元和高成本的多片設(shè)計(jì)的理想替代。40MIPS 的 運(yùn)行速度,使得2407A DSP 控制器能提供比傳統(tǒng)16 位微控制器和微處理器更高的性價(jià)比。
3.1 DSP 外圍電路
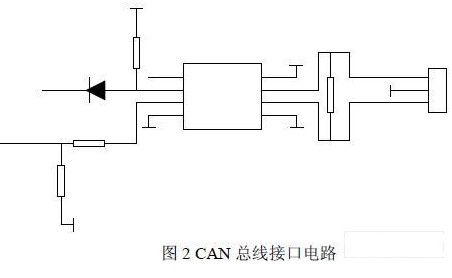
1、CAN 總線接口電路CAN 技術(shù)即控制器區(qū)域網(wǎng),是一種主要用于各種設(shè)備檢測及控 制的網(wǎng)絡(luò)。具有獨(dú)特的設(shè)計(jì)思想、良好的功能特性和極高的可靠性,現(xiàn)場抗干擾能力強(qiáng)。 TMS320LF2407A DSP 內(nèi)部集成CAN 控制器模塊,電路采用PC82C250 作為CAN 的接口芯 片;同理,由于PC82C250 仍為+5V 供電,故在PC82C250 與TMS320LF2407A DSP 之間加 入電平匹配電路。接口電路如圖2 所示。
2、外部存儲(chǔ)器擴(kuò)展DSP 具有片內(nèi)RAM,其中一部分用來運(yùn)行程序,另外一部分可以 用來存儲(chǔ)臨時(shí)數(shù)據(jù),為了加快硬件系統(tǒng)的調(diào)試速度,在調(diào)試階段不會(huì)將程序燒寫到DSP 的 flash 中,而是下載到外部擴(kuò)展RAM 中。因此,需擴(kuò)充一部分SRAM。本系統(tǒng)選擇了 CY7C1021V33 作為外部擴(kuò)展RAM。CY7C1021V33 是Cypress 公司生產(chǎn)的16 位64K 字節(jié)的 靜態(tài)RAM 存儲(chǔ)器,采用CMOS 工藝,具有自動(dòng)低功耗模式的功能,降低系統(tǒng)功耗,保證 低散熱量。同時(shí),CY7C1021V33 是+3.3V 供電,與DSP 有很好的兼容性。
3、編碼器的接口電路控制系統(tǒng)利用編碼器來檢測電機(jī)的位置,TMS320LF2407A DSP 事件管理器中有一個(gè)編碼器脈沖電路,對編碼器的反饋信號進(jìn)行解碼和計(jì)數(shù)而獲得電機(jī)運(yùn)行 時(shí)的轉(zhuǎn)向和速度。由于編碼器的供電電壓為5V,為了使編碼器的反饋信號和DSP 的電平匹 配,系統(tǒng)設(shè)計(jì)時(shí)主要考慮的是電壓的轉(zhuǎn)換,將5V 電壓轉(zhuǎn)換成3.3V。由于有的編碼器信號由 差分構(gòu)成,所以在設(shè)計(jì)時(shí),在進(jìn)行電壓轉(zhuǎn)換之前,首先將差分信號進(jìn)行處理。
4、JTAG 仿真接口程序的在線調(diào)試和仿真通過JTAG(Joint Test Action Group)標(biāo)準(zhǔn)測 試接口及相應(yīng)的控制器,從而不但能控制和觀察系統(tǒng)中處理器的運(yùn)行,測試每一塊芯片,還 可以用這個(gè)接口來下載程序。在TMS320 系列中,和JTAG 測試口同時(shí)工作的還有一個(gè)分析 模塊。它支持?jǐn)帱c(diǎn)的設(shè)置和程序存儲(chǔ)器、數(shù)據(jù)存儲(chǔ)器、DMA 的訪問,程序的單步運(yùn)行和跟 蹤,以及程序的分支和外部中斷的計(jì)數(shù)等。通過結(jié)合TI 的集成開發(fā)環(huán)境(CC)與JTAG 接 口,可以很方便地進(jìn)行實(shí)時(shí)在線調(diào)試。
3.2 功率驅(qū)動(dòng)電路設(shè)計(jì)
本系統(tǒng)的驅(qū)動(dòng)電路的設(shè)計(jì)主要是圍繞著Si9979Cs 展開的。Si9979 為無刷電動(dòng)機(jī)控制提 供諸如控制信號輸入、產(chǎn)生換向邏輯、門驅(qū)動(dòng)輸出和保護(hù)電路等一些功能。Si9979Cs 內(nèi)部 有輸入控制信號邏輯電路、功率放大電路、電源分離懸浮電路、斬波電路及電流反饋信號處 理電路等構(gòu)成。控制信號輸入端內(nèi)部都接上拉電阻,與電源VDD 相接,簡化的芯片的外圍 電路。芯片可以通過外圍RT 電路和PWM 控制端來控制電機(jī)電流及轉(zhuǎn)速。功率放大電路可 以使MOSFET 驅(qū)動(dòng)信號進(jìn)行直接驅(qū)動(dòng)。
由于功率驅(qū)動(dòng)電路采用 24V 供電,相對于DSP 的3.3V 電壓,非常容易對控制電路造成 干擾,導(dǎo)致控制系統(tǒng)穩(wěn)定性下降。故在系統(tǒng)設(shè)計(jì)時(shí)將功率驅(qū)動(dòng)電路和控制電路完全分開,功 率部分和控制部分不共地而控制信號采用光耦隔離,其中主要的控制信號為PWM 信號、EN 信號、DIR 信號和BRAKE 信號。我們采用TI 公司的高速光耦6N137 作為PWM 的隔離芯 片,采用Toshiba 公司的低成本光耦TLP521-4 作為EN 信號、DIR 信號和BRAKE 信號的隔 離芯片,為了保持邏輯的清晰,光耦設(shè)計(jì)采用同相邏輯。電路圖如圖3 所示。
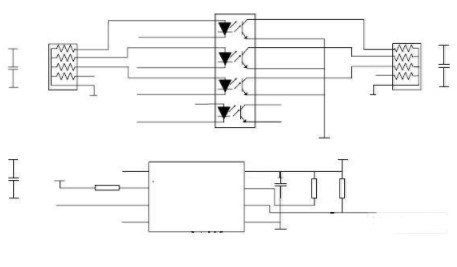
圖3 控制信號光耦隔離電路圖
3.3 電源電路的設(shè)計(jì)
控制系統(tǒng)主要由控制部分和驅(qū)動(dòng)部分組成,為了有效的減少各部分之間的干擾,我們將 控制部分和驅(qū)動(dòng)部分的電源完全隔離,這樣可以有效抑制驅(qū)動(dòng)部分和控制部分的相互干擾。 系統(tǒng)控制部分電源主要有 5V 和3.3V 兩種電壓,系統(tǒng)的外加電源為24V,為實(shí)現(xiàn)電源完全 隔離,采用DC/DC 變換器HDW5-24D05,變換器寬范圍輸入18-36V,輸入輸出完全隔離, 大功率、小體積,符合系統(tǒng)設(shè)計(jì)要求。
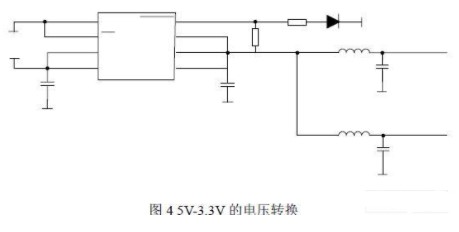
DSP 芯片的供電電壓3.3V,我們采用DC/DC 變換器變換后的5V 電源轉(zhuǎn)換成3.3V,選 擇低功耗電源轉(zhuǎn)換芯片TPS7333,輸入5V,輸出3.3V。編碼器的反饋信號,脈沖控制量的 輸入信號都是5V 的電平,為了實(shí)現(xiàn)與DSP 的3.3V 電平的匹配,我們采用TI 公司的電壓轉(zhuǎn) 換芯片SN74LVC4245A,8 通道,系統(tǒng)所有的5V 轉(zhuǎn)換3.3V 的信號都可以通過一塊芯片實(shí) 現(xiàn),電路圖如圖4 所示。
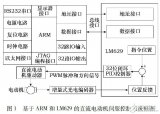
由于 24V 已經(jīng)通過DC/DC 變換器與控制部分電源完全隔離,故系統(tǒng)的外加引入電源 24V 可以直接給集成驅(qū)動(dòng)芯片Si9979Cs 和MOSFET 功率管IRF540 供電。霍爾元件的供電 電壓為5V,因?yàn)榛魻栐男盘柺欠答伒津?qū)動(dòng)元件上,所以霍爾元件的供電電壓應(yīng)該在驅(qū)動(dòng)部分由24V 直接轉(zhuǎn)換,由于24V 到5V 有較大的壓降,為了保證穩(wěn)定性,我們選用NI 公 司的大電流電壓轉(zhuǎn)換芯片LM2576-5,最大支持輸入電壓為45V。并且在LM2576-5 上加散 熱片,很有效的抑制了由于大壓降產(chǎn)生的芯片過熱的情況。
4 、電機(jī)控制系統(tǒng)的程序設(shè)計(jì)
電動(dòng)機(jī)控制系統(tǒng)程序設(shè)計(jì),是圍繞系統(tǒng)的總體設(shè)計(jì)思想,和電路設(shè)計(jì)思路以及系統(tǒng)調(diào)試 相互配合的過程。本控制系統(tǒng)的主要程序編制是圍繞TI 公司的TMS320LF2407A DSP 來進(jìn) 行的。程序主要完成PWM 波形的產(chǎn)生,編碼器的處理,運(yùn)動(dòng)軌跡規(guī)劃程序,位置回路、速 度回路雙閉環(huán)PI 控制和驅(qū)動(dòng)器指令接口電路的程序設(shè)計(jì)。
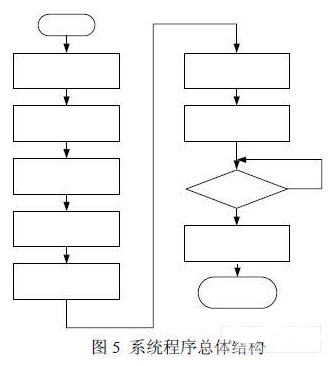
系統(tǒng)程序總體結(jié)構(gòu)如圖 5 所示。系統(tǒng)程序主要由主程序模塊和中斷程序模塊構(gòu)成:主 程序模塊主要完成變量的定義、各功能模塊的初始化和I/O 口的初始化等,而中斷服務(wù)程序 就是在中斷中執(zhí)行各功能模塊的程序,例如讀取當(dāng)前時(shí)刻的位置信息,位置回路、速度回路 的PI 調(diào)節(jié)、占空比的調(diào)節(jié)等,主程序是在程序開始時(shí)執(zhí)行一次,然后等待中斷的發(fā)生。
5、結(jié)語
本文完成了基于 DSP 的電動(dòng)機(jī)控制、驅(qū)動(dòng)電路的設(shè)計(jì)及制作。編寫了控制程序,實(shí)現(xiàn) 了電動(dòng)機(jī)系統(tǒng)位置、速度的雙閉環(huán)控制,系統(tǒng)控制性能良好。
-
dsp
+關(guān)注
關(guān)注
556文章
8158瀏覽量
357603 -
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4162瀏覽量
98778 -
MOSEFT
+關(guān)注
關(guān)注
0文章
35瀏覽量
4683
發(fā)布評論請先 登錄
無刷直流電動(dòng)機(jī)的結(jié)構(gòu)示意圖原理圖
無刷直流電動(dòng)機(jī)的結(jié)構(gòu)示意圖原理圖
求大神!關(guān)于無刷直流電動(dòng)機(jī)的控制系統(tǒng)設(shè)計(jì)。
【我是電子發(fā)燒友】說說直流電動(dòng)機(jī)
怎樣去設(shè)計(jì)永磁無刷直流電動(dòng)機(jī)控制系統(tǒng)?
帶光電編碼器式直流電動(dòng)機(jī)模型及控制
ZN-758HGJ直流電動(dòng)機(jī)運(yùn)動(dòng)控制實(shí)驗(yàn)系統(tǒng)功能特點(diǎn)及組成
PD控制器直流電動(dòng)機(jī)速度控制
如何使用Arduino控制直流電動(dòng)機(jī)
直流電動(dòng)機(jī)傳動(dòng)控制

直流電動(dòng)機(jī)的分類
基于Si9979Cs的無刷直流電動(dòng)機(jī)驅(qū)動(dòng)電路設(shè)計(jì)
無刷直流電動(dòng)機(jī)及其控制系統(tǒng)
直流電動(dòng)機(jī)伺服控制系統(tǒng)設(shè)計(jì)
Arduino直流電動(dòng)機(jī)控制教程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論