 基于LRR和SRR的毫米波感知系統的GM的L1的系統架構
基于LRR和SRR的毫米波感知系統的GM的L1的系統架構

我在知乎寫了一篇問答,在這里更自由一些,寫一些我的看法。因為之前工作的關于,對于這個系統還是有所了解的。
GM在主動安全領域有幾個組,在北美和之前歐寶都有,是一步步從L0開始做起的,在EP2和EP3的平臺上
這是在E2和E3上做的
凱迪拉克的ADAS演進
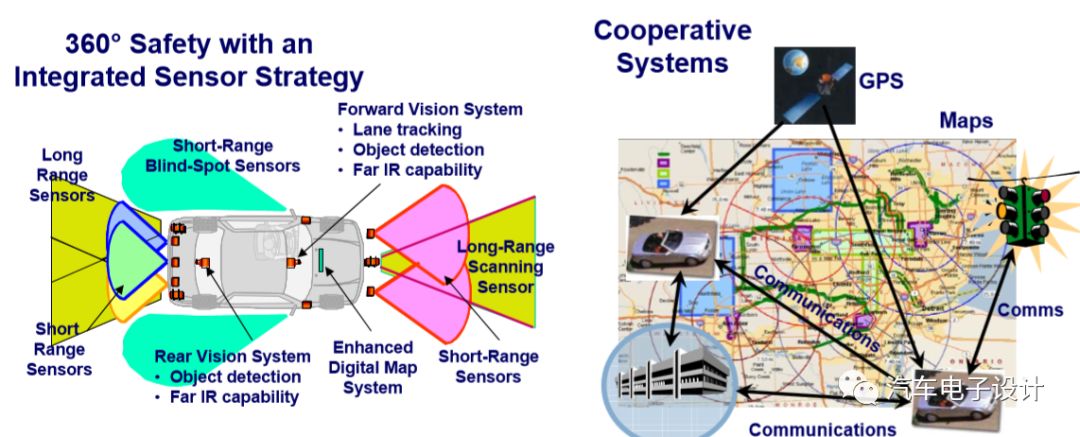
我們先來說通用的故事,這個系統設計從配置上如下,是從單純的警告,進入輔助到套件(L1),然后進入L2層級,特別是導入了外部的通信網絡模塊和地圖來輔助這個L2做到更高效和安全。在從不同的功能演進的時候,凱迪拉克是一步步走過來的,在傳感器配置,功能的實現過程中,從里到外有著比較深刻的演進。
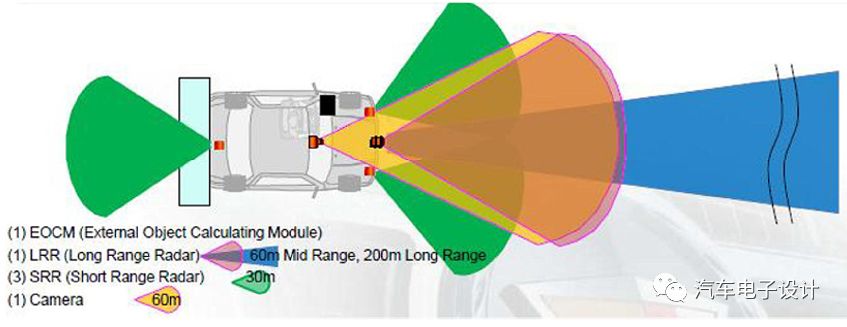
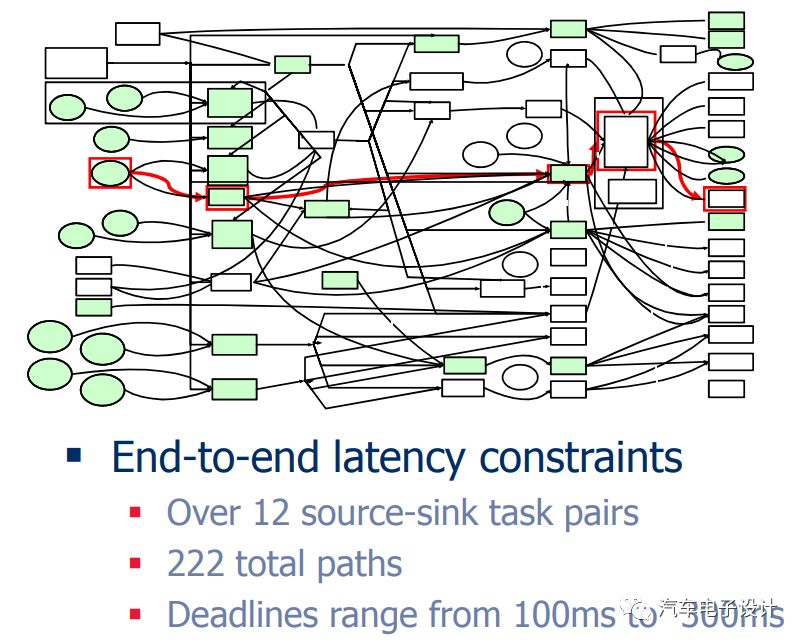
我們可以看到在GM的L1的系統架構,是基于LRR和SRR的毫米波感知系統,配合圖像的融合來對四周的環境進行感知,處理器的核心是EOCM
備注:EOCM :external object calculation modules是通用有關于感知部件處理的單元的叫法,LRR和SRR是里面的長距離毫米波雷達和短距離的毫米波雷達
備注:這是之前概念設計里面有關于系統配置
到實用化之后,基本使用的內容都存在了
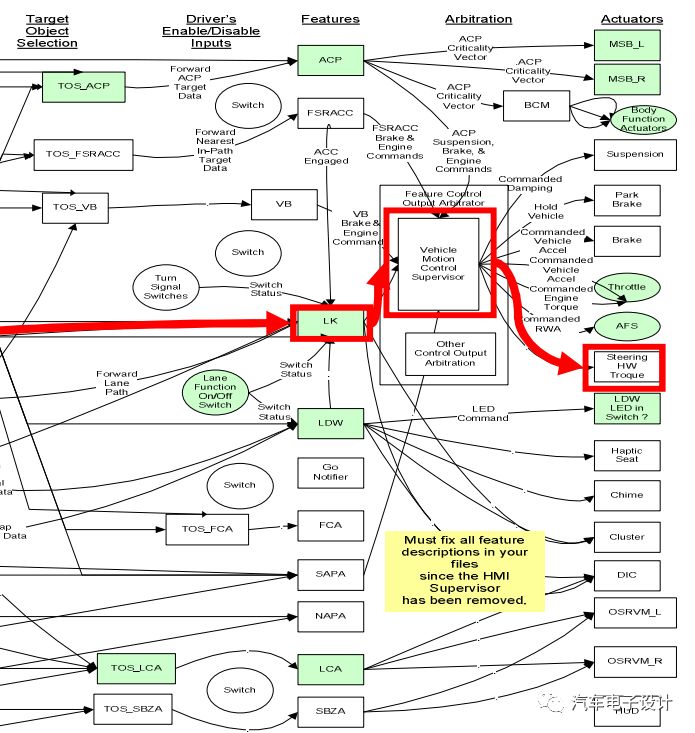
具備功能安全與網絡安全雙模塊,從兩個層面保證系統的安全性。系統擁有兩個EOCM模塊,實時進行互相備份,并在剎車系統、轉向控制、駕駛員注意力監控等子系統,全面實現增強性冗余設計,以確保安全駕駛和行車安全。這段論述在一些軟件架構里面有一個典型的圖:
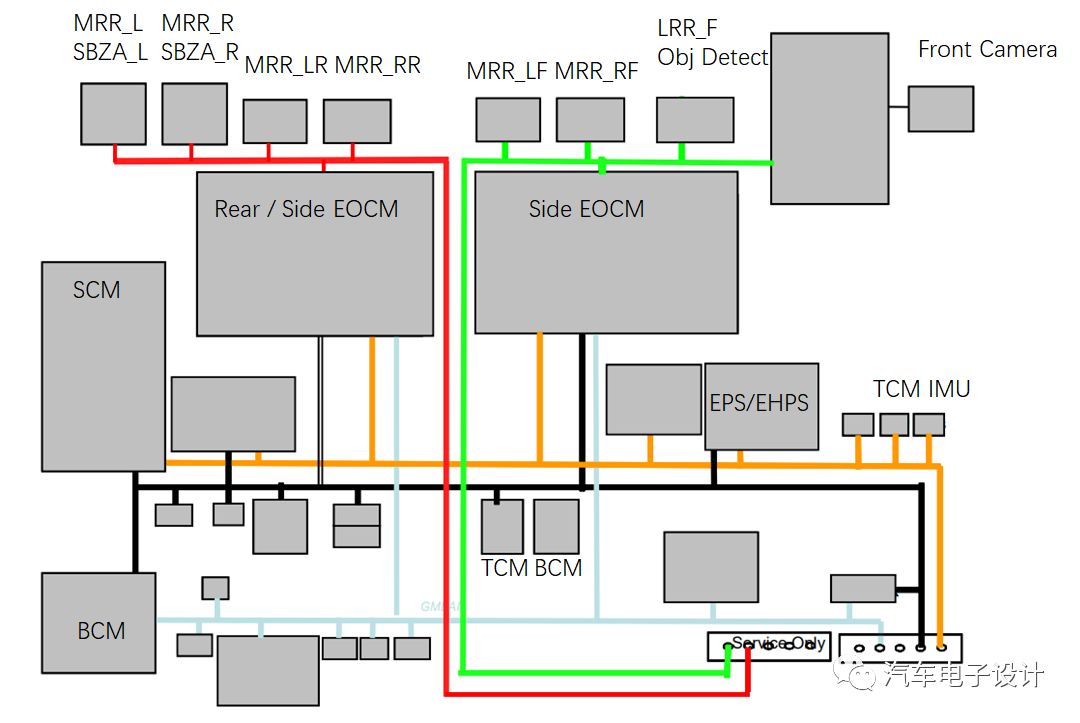
根據這個拓撲圖,可以猜測用了感知的兩根總線(黃色+綠色)
?根據現在來看,左右個兩根對等的是側邊雷達,而主長距離雷達和主攝像頭模塊分別掛兩邊
?執行的總線也是掛上剎車、轉向
?大的模塊可能還有那個地圖模塊,也需要與兩個EOCM進行總線性質的集成
執行用了兩根總線同時掛在這里(黃色+黑色),并使用原有的藍色的作為通信總線傳遞基本數據信息
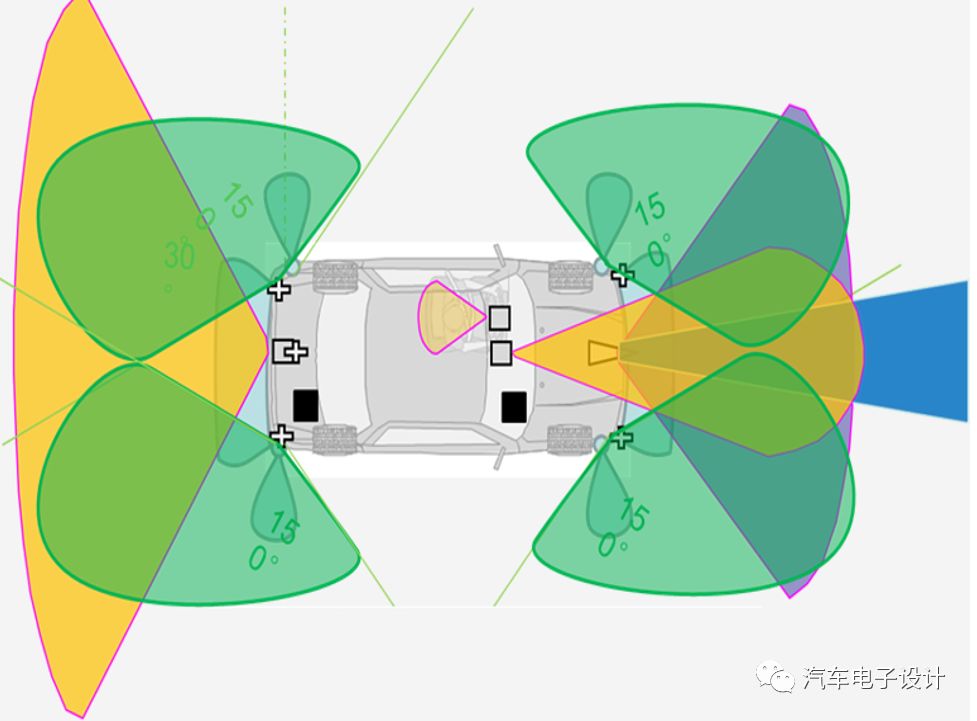
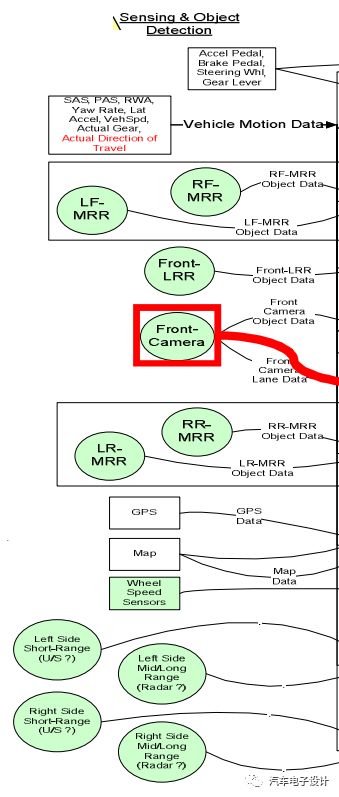
3種攝像頭——前攝像頭、環視攝像頭、車內攝像頭,3種雷達——長距雷達、短距雷達、超聲波雷達,以及慣性導航.實時攝像頭用于檢測車道線與識別交通標志;雷達傳感器用于探測其他的道路使用者,包括車輛、障礙物等
這里給了一個基本原理圖包含了里面的功能融合的劃分,由于存在兩個EOCM,里面的功能給切分了,到底如何進行融合對比,實際比這個要復雜的多。做起來一塊塊的測試,這里只是做一個初步的探討,僅供參考。
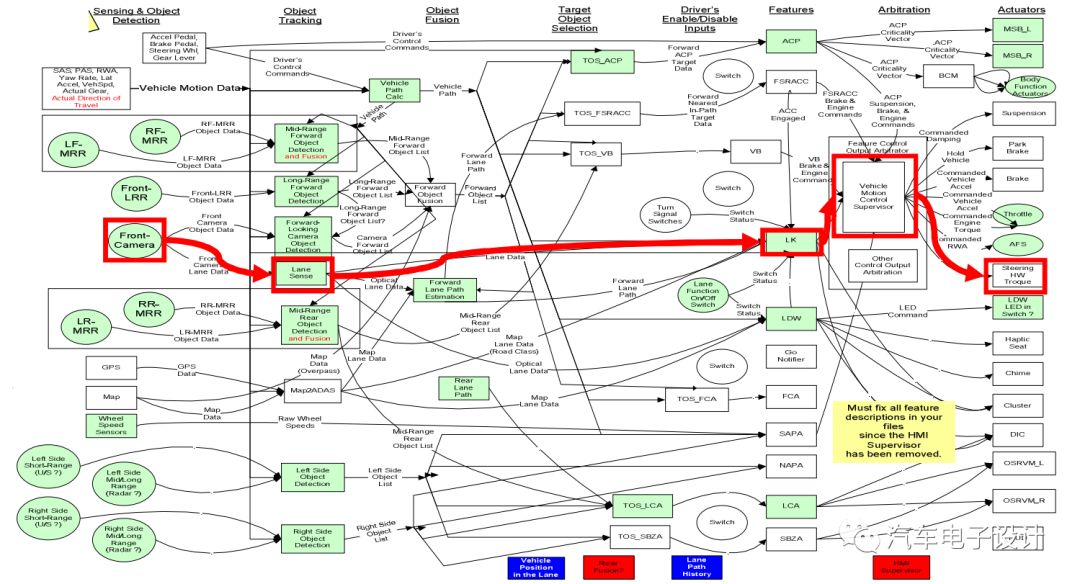
在上面的傳感器里,這里都把傳感器的信號做成了輸入
在信號融合處理之后形成了
前向長距離的毫米波傳感器感知
前向視覺感知
前向中等距離的障礙物感知與融合
前后后方距離障礙物的融合
根據這些信號在形成前向信號的融合和前向道路的融合,其中道路融合是根據
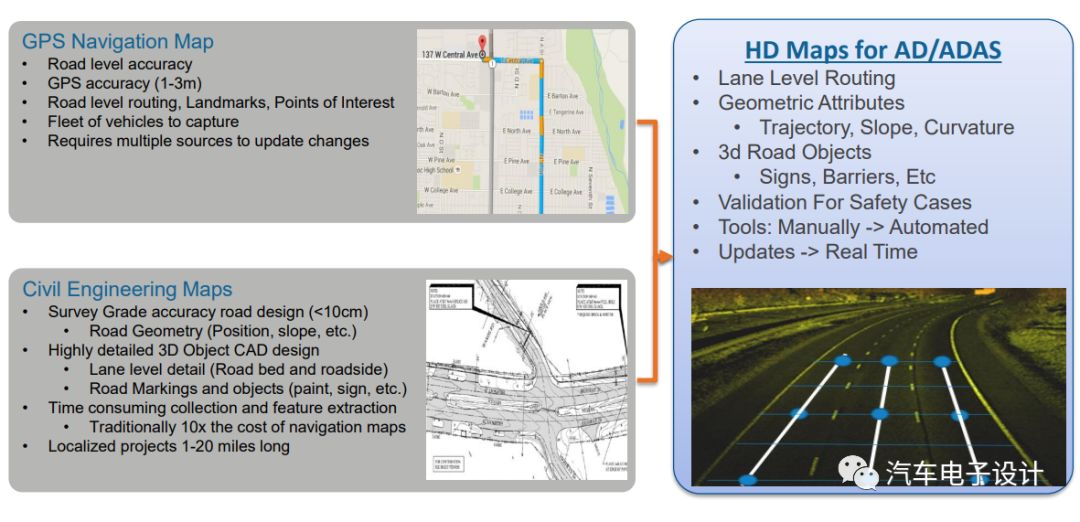
GPS+Map2ADAS的位置確定(這個Map2ADAS和完全的自動駕駛可能有一些差異,根據不同的路況條件有不同的做法)
前向視覺定位
備注:這里的概念設計到后面確實的通過T-box進行更新和發布道路信息是做了不少工作的
通過激光雷達來掃描地圖,通過預先制作的高精度路網信息配合車輛的定位技術,可以保證避免以上的錯誤。高精地圖記錄了精確的道路絕對位置、車道信息、指示等信息,確保超級智能駕駛系統只在合適的道路條件下啟動。為了達到車道級別的精確定位,在地面上建立了具有絕對位置的參考坐標點用于計算并補償GPS信號穿越地球電離層產生的誤差,這些補償數據將被實時上傳至云端,并下發到每一臺裝載超級智能駕駛系統的車輛上。這種突破方法將GPS數據的精度提升到亞米級別,有效地保障了該系統對車道的判斷。目前所提供的實時方位數據的準確性是傳統GPS的4-8倍。
這個地圖的細節還沒有具體發布
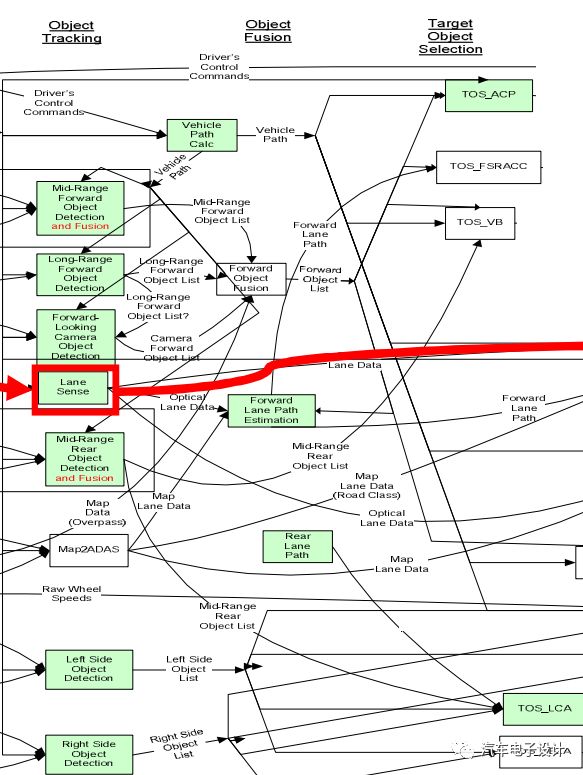
然后再形成一個個實際的功能組合
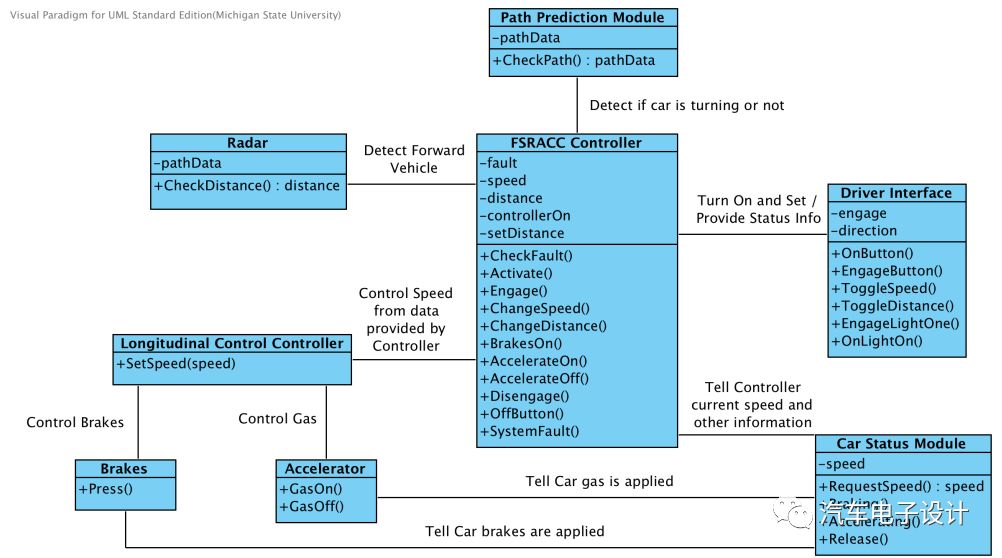
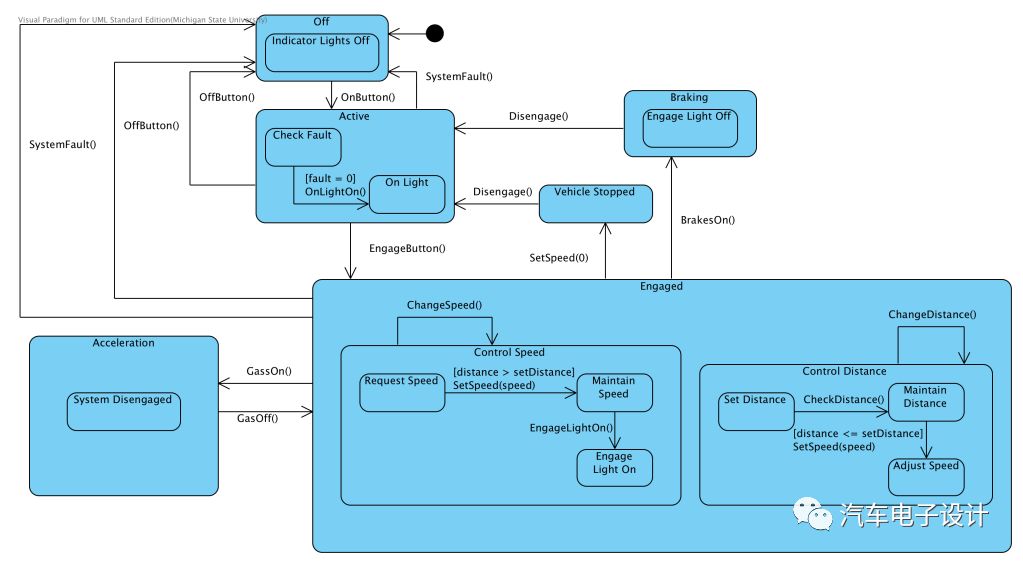
備注:以FSRACC為例,在Software Requirements Specification (SRS)里面做了一些基本的介紹
狀態簡圖
我們看這個架構圖,基本還是以一個分布式的系統來構建,以大部分成熟的技術上面來搭建新的功能。某種層面上,能夠得到一個非常可靠的系統。從Tier1算法來看,也是建立在Mobieye這樣成熟的視覺軟件,融合毫米波雷達的信息來獲取整個外部的信息。
分布式系統需要仔細考慮功能架構的軟件處理的問題,在里面核心的每一個軟件功能,信號輸入的時候,需要考慮實時性。
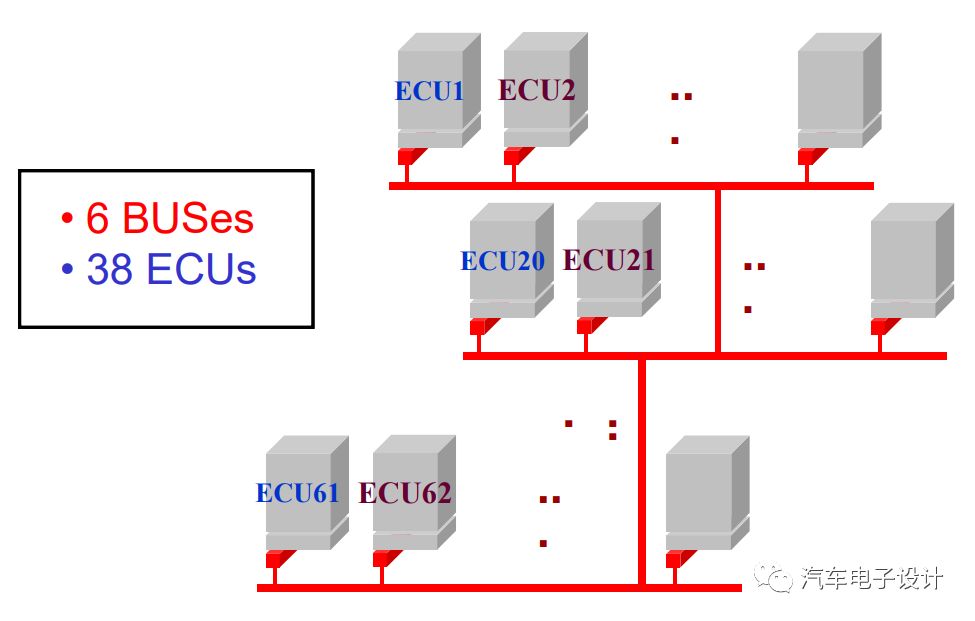
短期內,車企開發L2系統都是經由現在來做的;從長遠來看往L3和L4的架構,需要在架構上革新。所以從這個角度來看,GM的這個架構往前再走一步,基本上也是需要類似與ZFAS一樣做一個集總式的設計,考慮把各種通信的工作在內部進行,然后考慮加大運算速度。
-
傳感器
+關注
關注
2564文章
52793瀏覽量
765444 -
通信網絡
+關注
關注
22文章
2076瀏覽量
52877
原文標題:Super Cruise系統架構的信息
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
2019年1月中國毫米波雷達市場,維寧爾SRR奪冠占32.4%,博世LRR稱雄占40.1%

基于ARM的毫米波天線自動對準平臺系統
淺析車載毫米波雷達
77G毫米波雷達在 ADAS 功能和 AD 自動駕駛中的角色和功能
毫米波雷達感知技術搭建車路協同系統的可行性
漫談車載毫米波雷達歷史
ADAS系統無人駕駛的眼睛毫米波雷達
了解毫米波 -- 之一
了解毫米波“移相”--之三
毫米波雷達(RADAR)






 工商網監
工商網監
評論