") 伺服電機中的回原點方式
伺服電機中的回原點方式

一、回原點簡介
1.伺服電機為什么要原點
伺服電機的運行需要一個參考點,這個參考點就是原點。原點通常是由光電開關(guān)或機械開關(guān)來確定的,其位置是固定的。當(dāng)伺服電機運行時,控制器會根據(jù)原點的位置來計算電機的位置。如果沒有原點,控制器就無法確定電機的位置,從而無法精確地控制機器的運動。
除了用于計算電機的位置,原點還有一個重要的作用,就是用于校準(zhǔn)電機的位置。在伺服電機運行時,可能會出現(xiàn)電機位置與實際位置不一致的情況,這時就需要進行校準(zhǔn)。校準(zhǔn)的方法就是將電機移動到原點位置,然后重新確定電機的位置,并將其校準(zhǔn)為正確的位置。因此,原點是伺服電機正常運行的基礎(chǔ),沒有原點,伺服電機就無法正常工作。
2.原點回歸的重要性
原點回歸是指將伺服電機移動到原點位置的過程。原點回歸非常重要,因為它可以保證機器的運行精度和穩(wěn)定性。下面是原點回歸的幾個重要作用:
1)校準(zhǔn)電機位置
當(dāng)伺服電機運行時,可能會出現(xiàn)電機位置與實際位置不一致的情況,這時就需要進行校準(zhǔn)。校準(zhǔn)的方法就是將電機移動到原點位置,并重新確定電機的位置。只有才能夠精確地校準(zhǔn)電機的位置,從而保證機器的運行精度和穩(wěn)定性。
2)避免機器漂移
在機器運行過程中,可能會出現(xiàn)位置漂移的情況,即機器的位置與實際位置不一致。如果不經(jīng)常進行原點回歸,這種漂移會越來越嚴(yán)重,導(dǎo)致機器無法正常工作。可以及時發(fā)現(xiàn)位置漂移的問題,并進行校準(zhǔn),從而避免機器漂移。
3)保護機器安全
機器在運行過程中可能會出現(xiàn)異常情況,比如碰撞等。如果不進行原點回歸,機器的位置就無法確定,當(dāng)發(fā)生異常情況時,機器可能會繼續(xù)運行,導(dǎo)致嚴(yán)重的事故。可以及時發(fā)現(xiàn)異常情況,并停止機器的運行,保護機器的安全。
4)提高生產(chǎn)效率
原點回歸可以幫助機器實現(xiàn)快速、準(zhǔn)確的定位,從而提高生產(chǎn)效率。機器可以快速地回到正確的位置,從而節(jié)省時間和成本,并提高生產(chǎn)效率。
總之,伺服電機為什么要原點,原點回歸的重要性不言而喻。原點是伺服電機正常運行的基礎(chǔ),沒有原點,伺服電機就無法正常工作。原點回歸可以保證機器的運行精度和穩(wěn)定性,避免機器漂移,保護機器安全,提高生產(chǎn)效率。因此,在使用伺服電機時,一定要經(jīng)常進行原點回歸,以確保機器的正常運行。
二、回原點方式
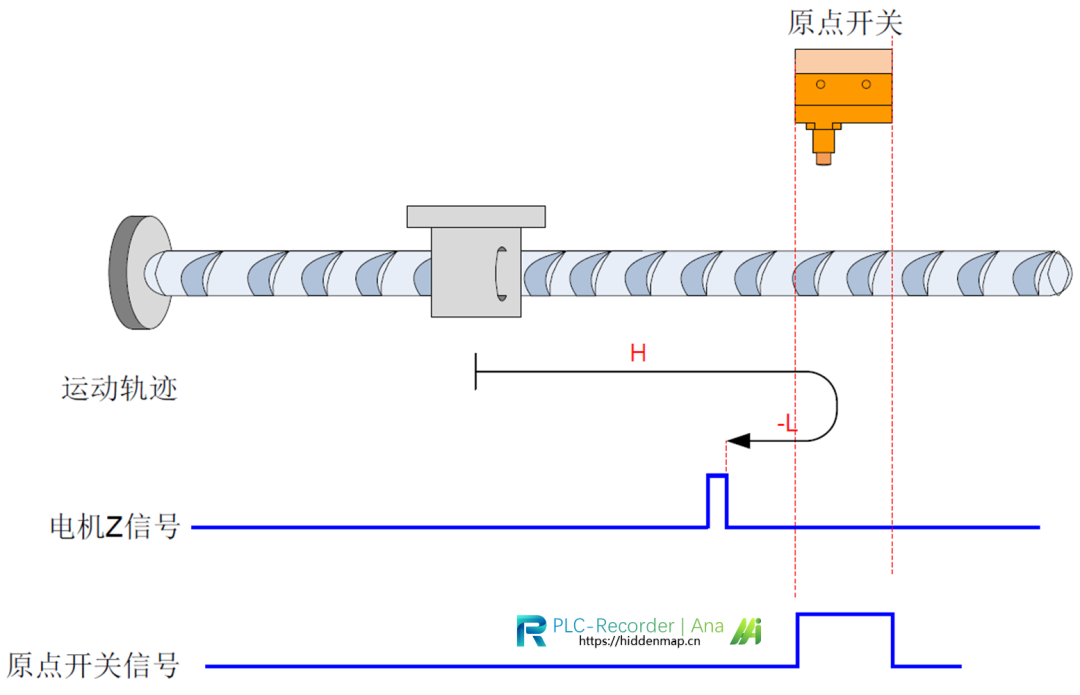
1.方式一
機械原點:電機Z信號
減速點:反向超程開關(guān)
H:代表高速
L:代表低速
1)回零啟動時減速點信號無效
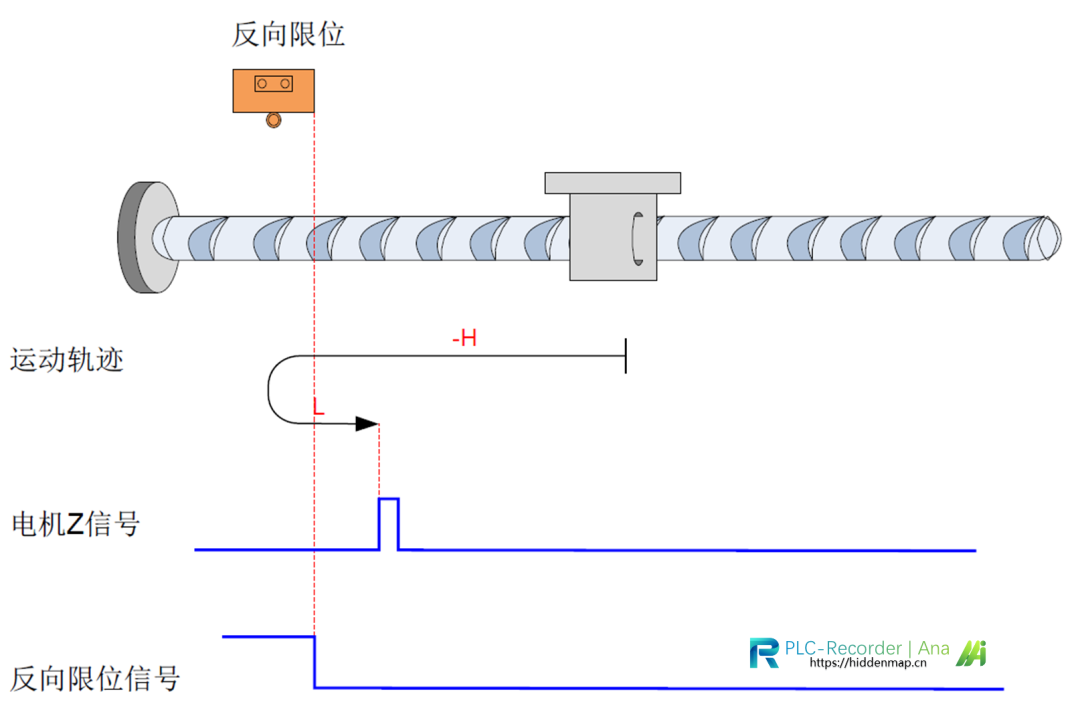
開始回零時N-OT=0,以反向高速開始回零,遇到N-OT 上升沿后,減速,反向,正向低速運行,遇到N-OT下降沿后的第一個Z停機。
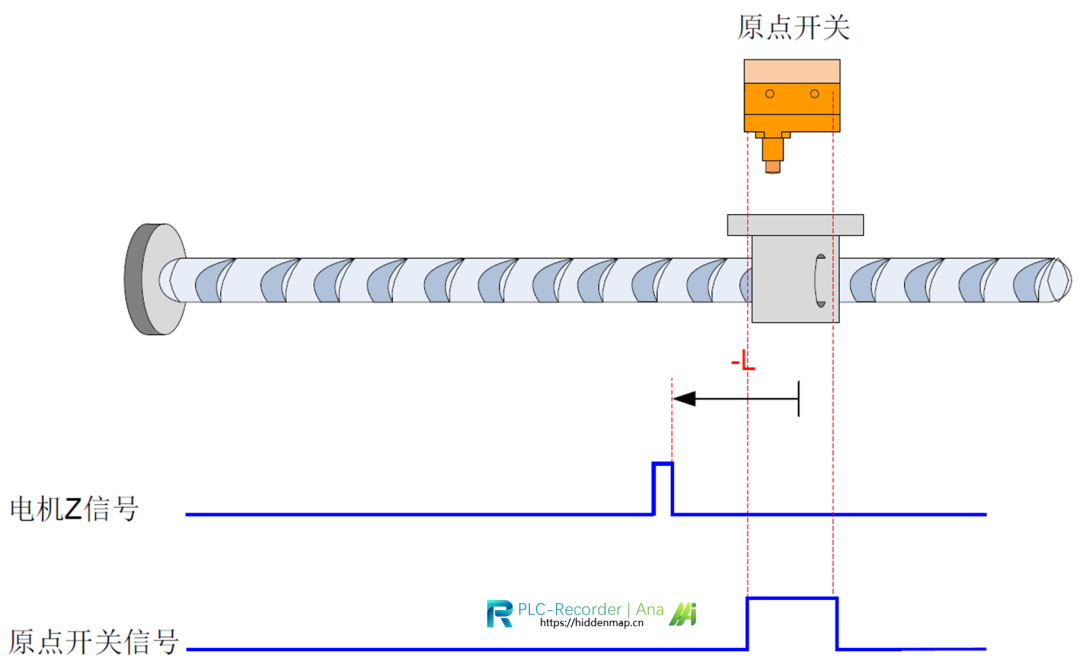
2)回零啟動時減速點信號有效
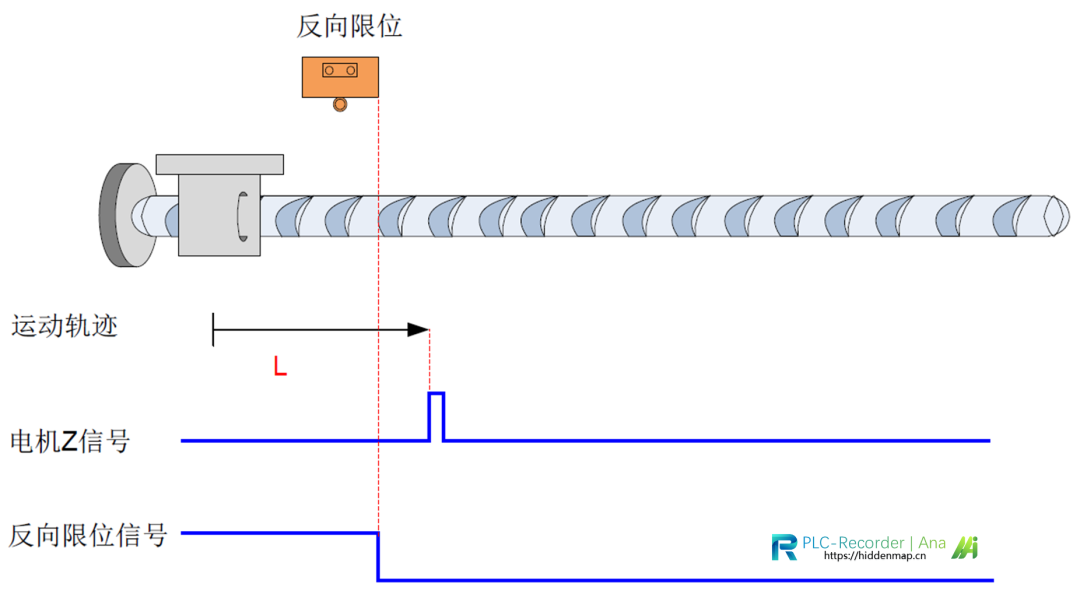
回零啟動時N-OT=1,直接正向低速開始回零,遇到N-OT 下降沿后的第一個Z 停機。
2.方式二
原點:Z 信號
減速點:正向超程開關(guān)
H:代表高速
L:代表低速
1)回零啟動時減速點信號無效
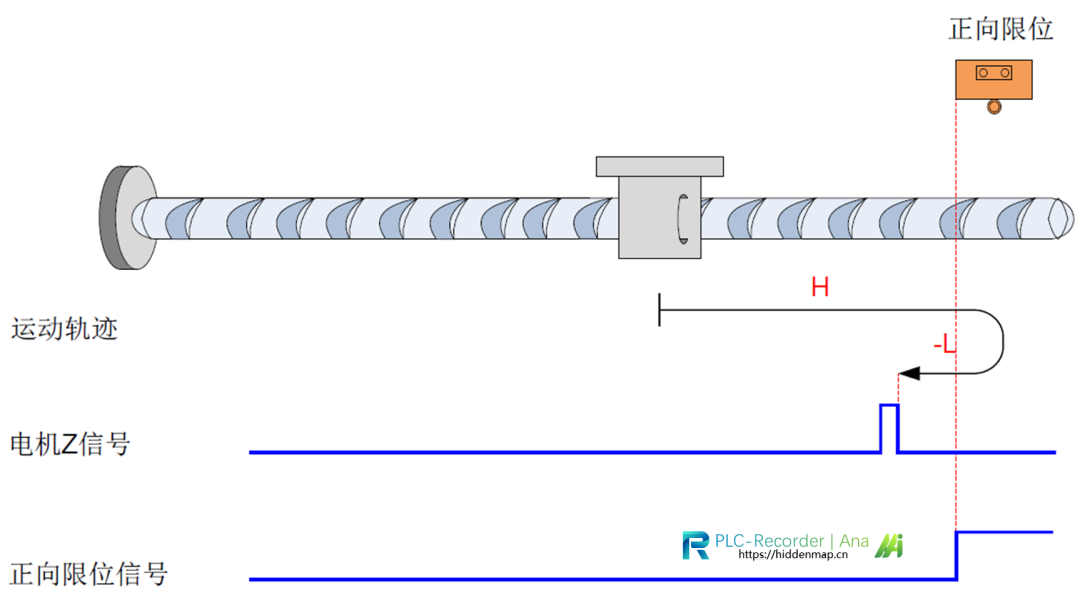
開始回零時P-OT=0,以正向高速開始回零,遇到P-OT 上升沿后,減速,反向,反向低速運行,遇到P-OT下降沿后的第一個Z 停機。
2)回零啟動時減速點信號有效
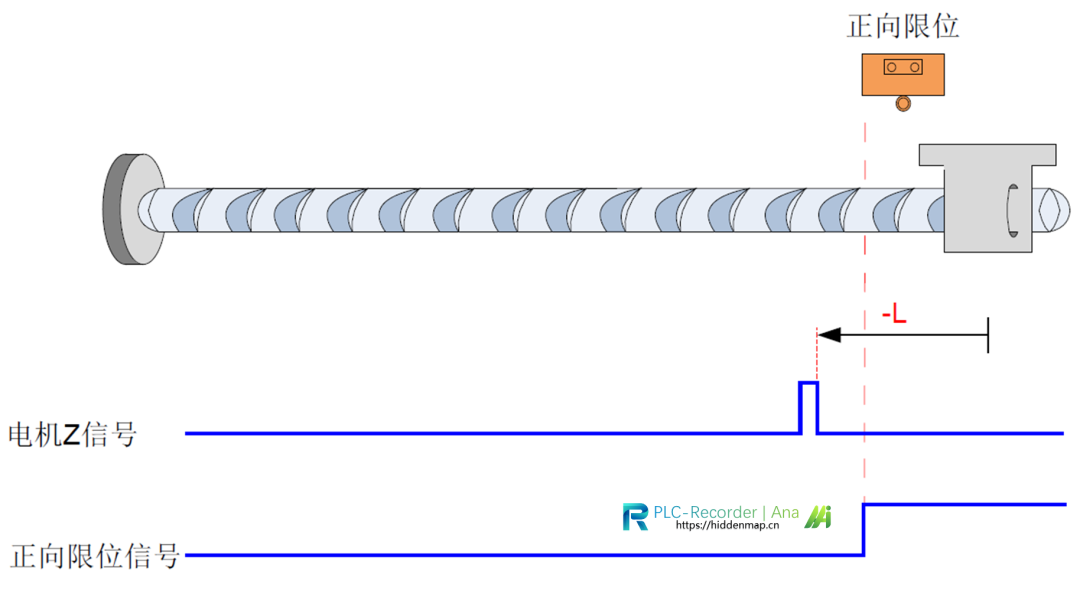
回零啟動時P-OT=1,直接反向低速開始回零,遇到P-OT 下降沿后的第一個Z 停機。
3.方式三
原點:Z 信號
減速點:原點開關(guān)(HW)
H:代表高速
L:代表低速
1)回零啟動時減速點信號無效
開始回零時HW=0,以正向高速開始回零,遇到HW 上升沿后,減速,反向,反向低速運行,遇到HW 下降沿后,繼續(xù)運行,之后遇到第一個Z 停機。
2)回零啟動時減速點信號有效
回零啟動時HW=1,直接反向低速開始回零,遇到HW 下降沿后的第一個Z 停機。
4.方式四
原點:Z 信號
減速點:原點開關(guān)(HW)
H:代表高速
L:代表低速
1)回零啟動時減速點信號無效
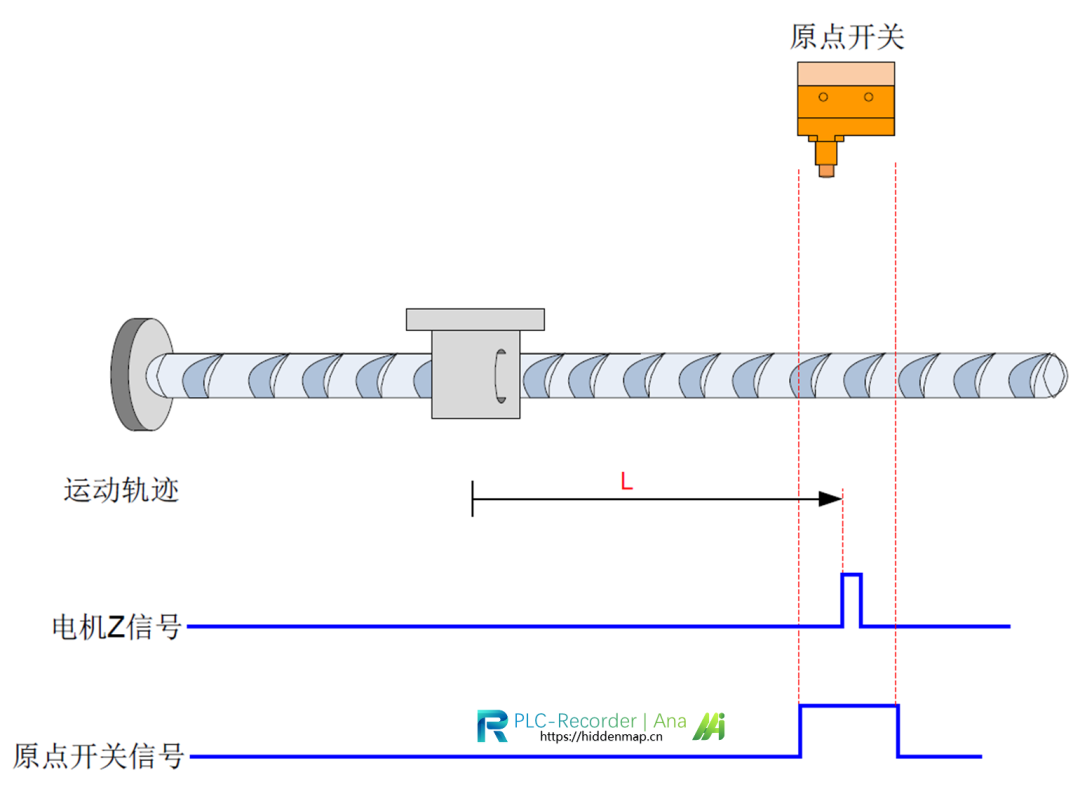
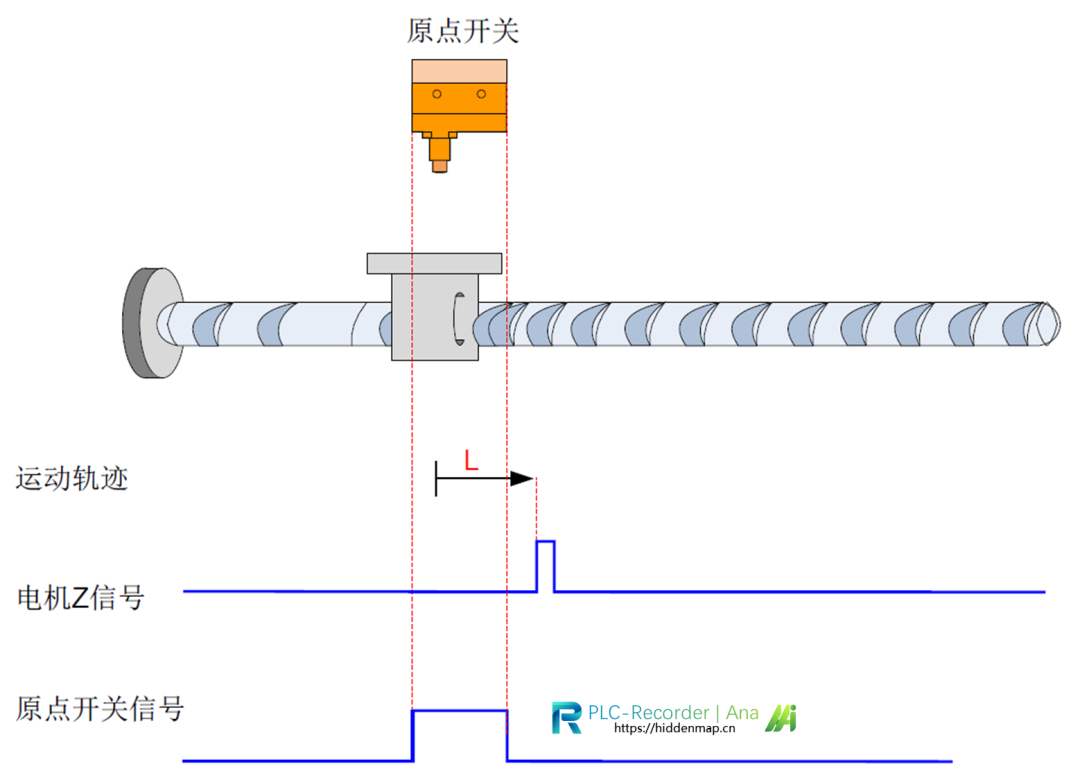
開始回零時HW=0,直接正向低速開始回零,遇到HW 上升沿后第一個Z 停機。
2)回零啟動時減速點信號有效
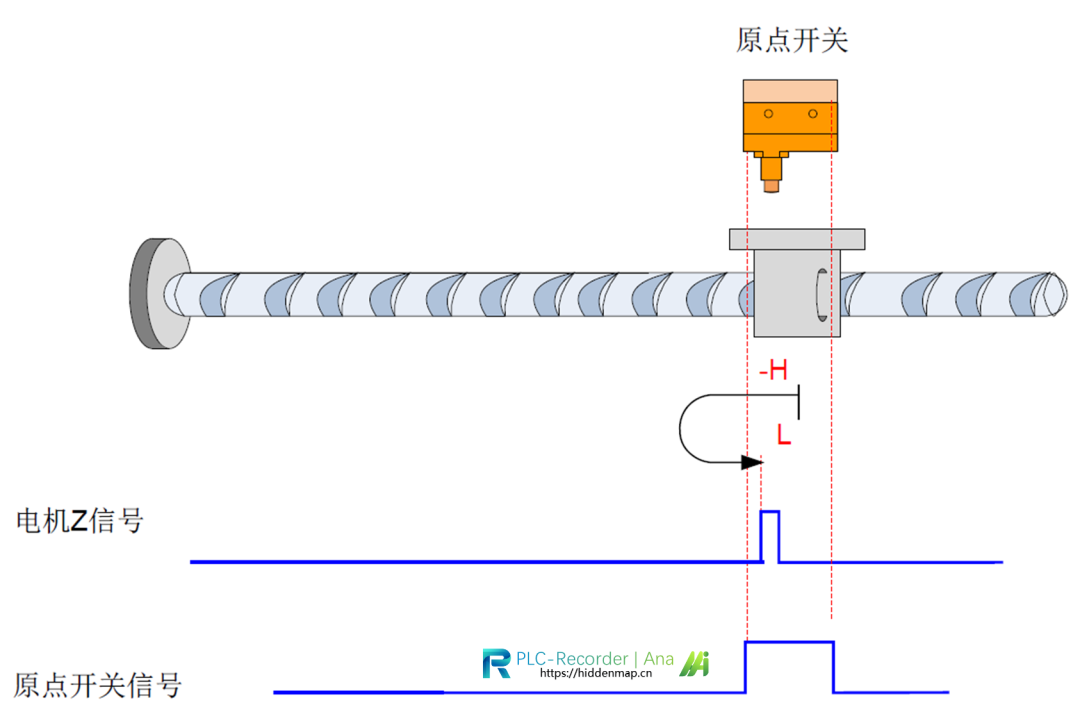
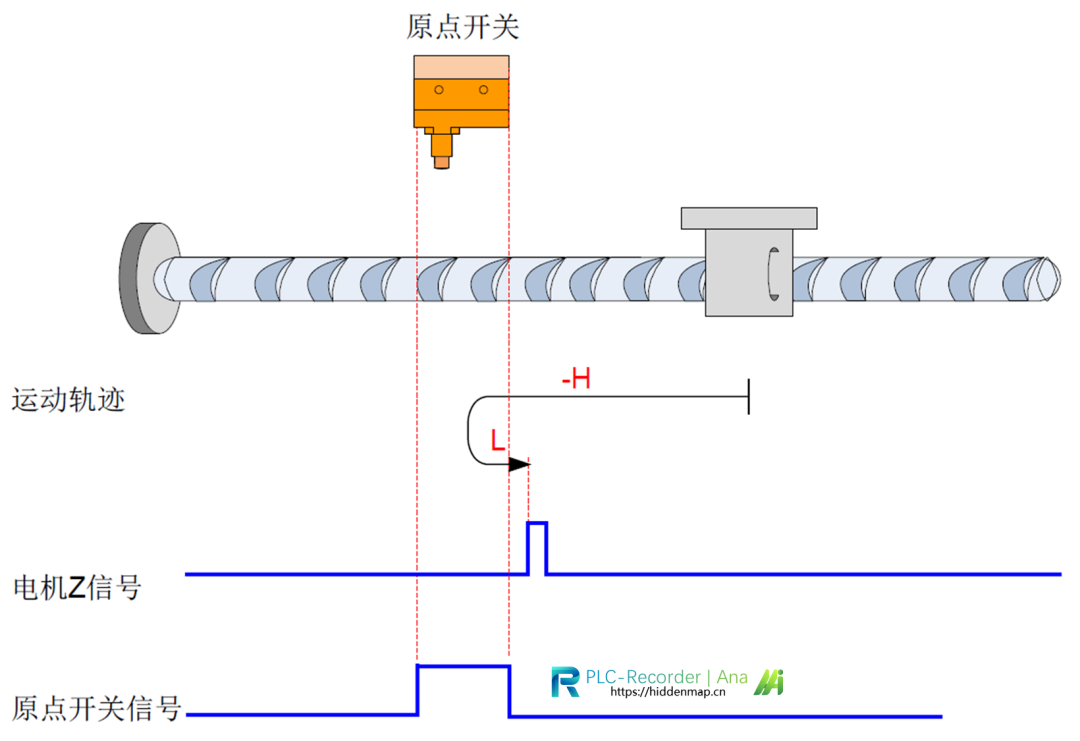
回零啟動時HW=1,以反向高速開始回零,遇到HW 下降沿后,減速,反向,正向低速運行,遇到HW 上升沿后的第一個Z 停機。
5.方式五
原點:Z 信號
減速點:原點開關(guān)(HW)
H:代表高速
L:代表低速
1)回零啟動時減速點信號無效
開始回零時HW=0,以反向高速開始回零,遇到HW 上升沿后,減速,反向,正向低速運行,遇到HW 下降沿后的第一個Z 停機。
2)回零啟動時減速點信號有效
回零啟動時HW=1,則直接正向低速開始回零, 遇到HW 下降沿后的第一個Z 停機。
三、總結(jié)
綜合考慮,選擇哪種回原點方式取決于具體的應(yīng)用場景和需求。如果需要高精度的原點定位,尤其是在精密加工或高端制造領(lǐng)域,負(fù)正負(fù)回原點模式可能是最佳選擇。如果對精度要求不高,或者出于成本考慮,可以使用原點開關(guān)或Z相信號的方式。
-
伺服電機
+關(guān)注
關(guān)注
88文章
2124瀏覽量
59754 -
運動控制
+關(guān)注
關(guān)注
4文章
727瀏覽量
33587 -
工業(yè)自動化
+關(guān)注
關(guān)注
17文章
2757瀏覽量
68391
原文標(biāo)題:工業(yè)自動化運動控制中的回原點方式你知道幾種?(一)
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論