 yolov5訓練部署全鏈路教程
yolov5訓練部署全鏈路教程

1. Yolov5簡介
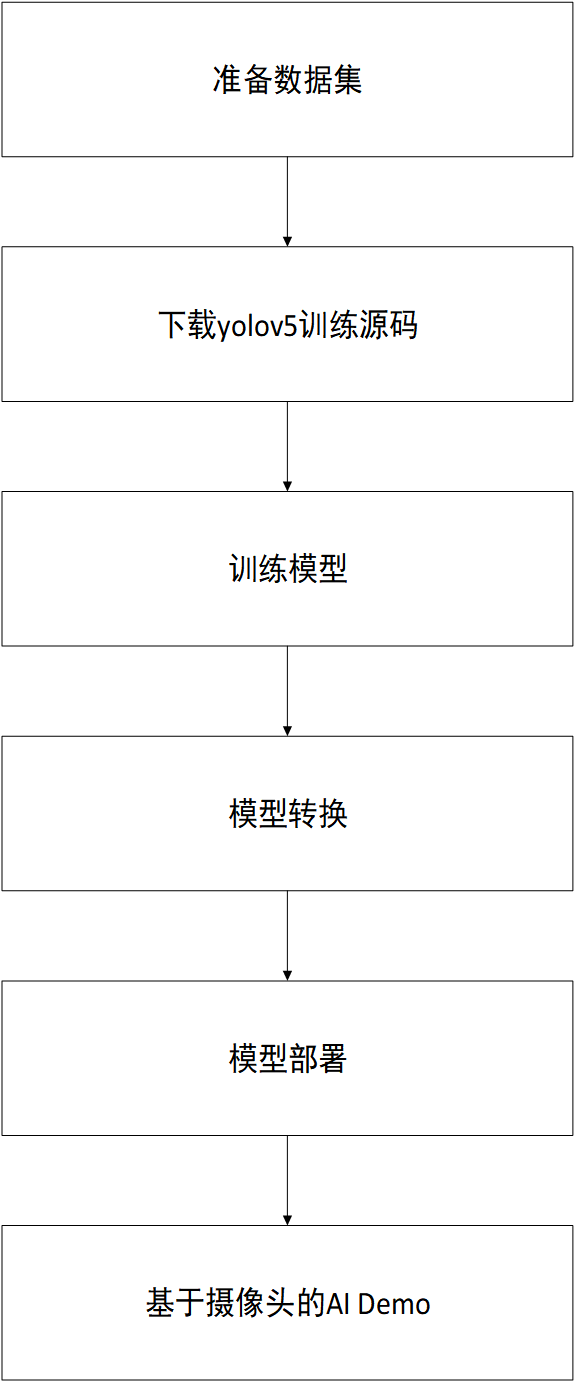
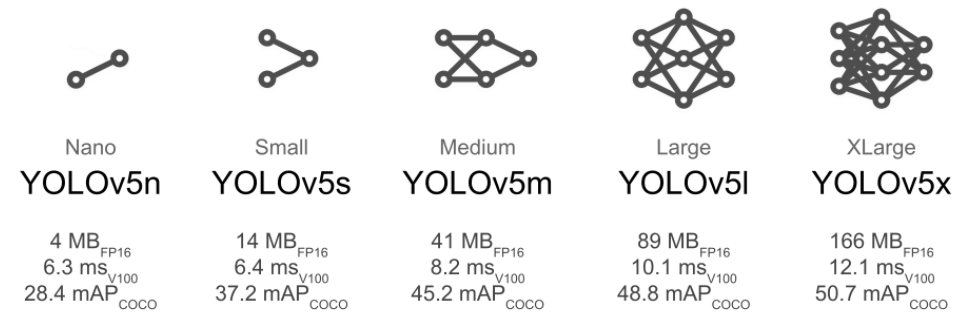
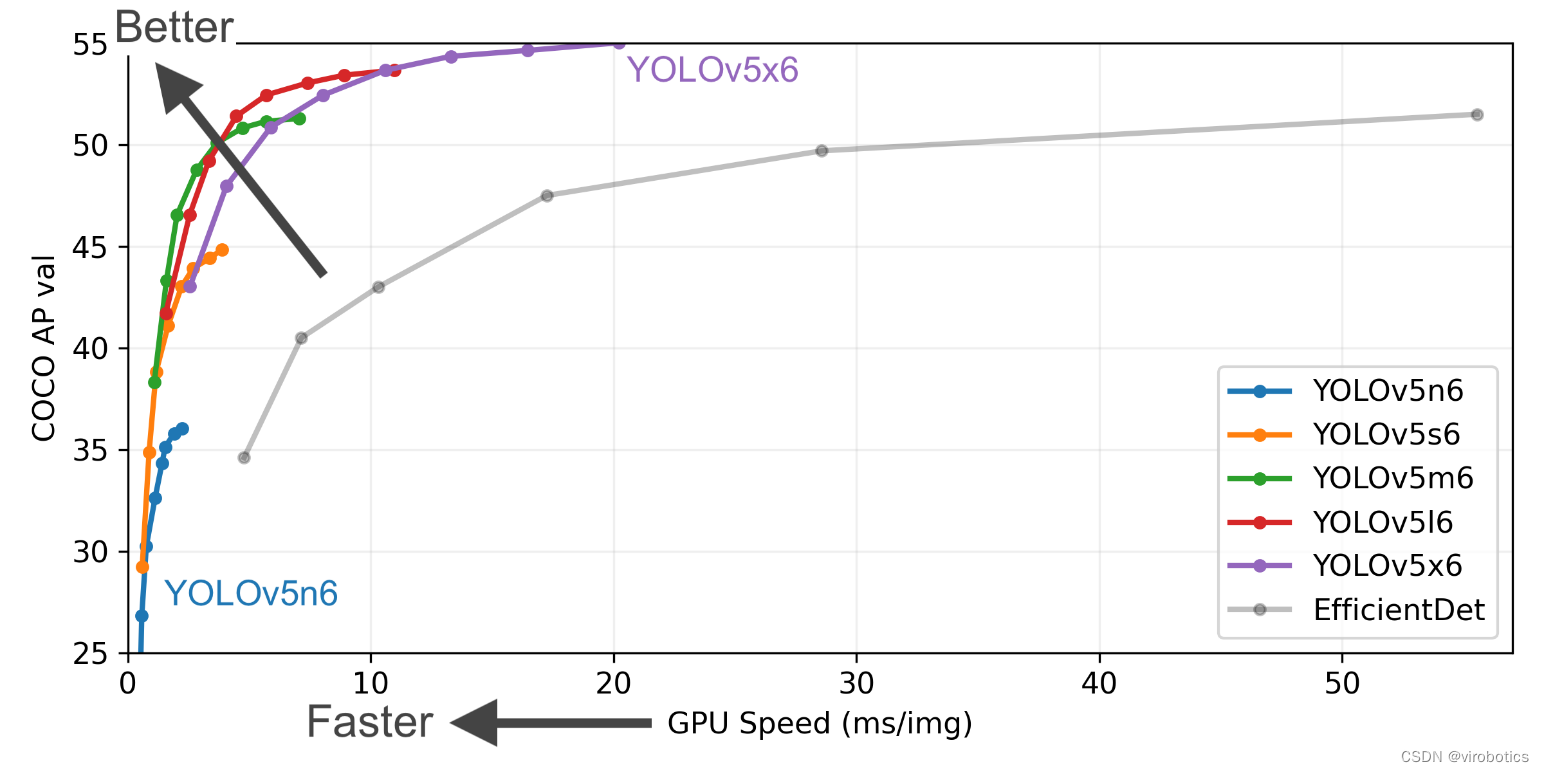
YOLOv5 模型是 Ultralytics 公司于 2020 年 6 月 9 日公開發布的。YOLOv5 模型是基于 YOLOv3 模型基礎上改進而來的,有 YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x 四個模型。YOLOv5 相比YOLOv4 而言,在檢測平均精度降低不多的基礎上,具有均值權重文件更小,訓練時間和推理速度更短的特點。YOLOv5 的網絡結構分為輸入端BackboneNeck、Head 四個部分。本教程針對目標檢測算法yolov5的訓練和部署到EASY-EAI-Nano(RV1126)進行說明,而數據標注方法可以參考我們往期的文章《Labelimg的安裝與使用》。以下為YOLOv5訓練部署的大致流程:
2. 準備數據集2.1 數據集下載
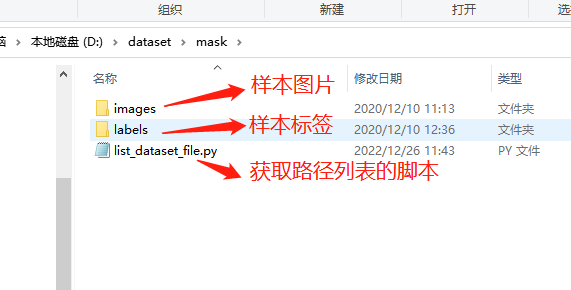
本教程以口罩檢測為例,數據集的百度網盤下載鏈接為:https://pan.baidu.com/s/1vtxWurn1Mqu-wJ017eaQrw 提取碼:6666解壓完成后得到以下三個文件:
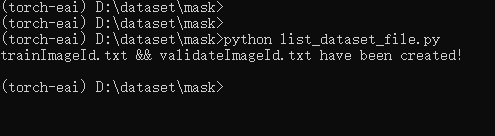
2.2 生成路徑列表在數據集目錄下執行腳本list_dataset_file.py:
python list_dataset_file.py
執行現象如下圖所示:
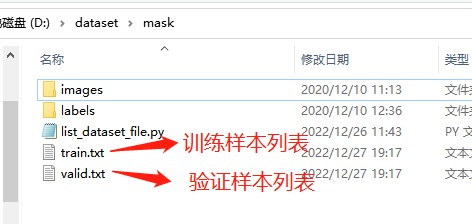
得到訓練樣本列表文件train.txt和驗證樣本列表文件valid.txt,如下圖所示:
3. 下載yolov5訓練源碼
通過git工具,在PC端克隆遠程倉庫(注:此處可能會因網絡原因造成卡頓,請耐心等待):
git clone https://github.com/EASY-EAI/yolov5.git
得到下圖所示目錄:
4. 訓練算法模型切換到yolov5的工作目錄,接下來以訓練一個口罩檢測模型為例進行說明。需要修改data/mask.yaml里面的train.txt和valid.txt的路徑。
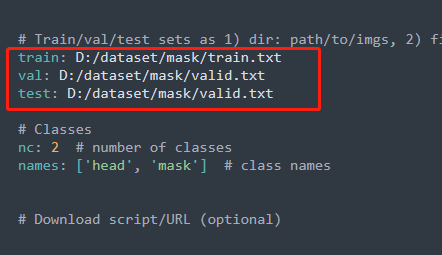
執行下列腳本訓練算法模型:
python train.py --data mask.yaml --cfg yolov5s.yaml --weights "" --batch-size 64
開始訓練模型,如下圖所示:

關于算法精度結果可以查看./runs/train/results.csv獲得。5. 在PC端進行模型預測訓練完畢后,在./runs/train/exp/weights/best.pt生成通過驗證集測試的最好結果的模型。同時可以執行模型預測,初步評估模型的效果:
python detect.py --source data/images --weights ./runs/train/exp/weights/best.pt --conf 0.5
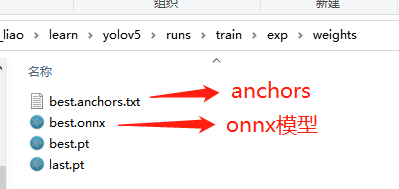
6. pt模型轉換為onnx模型算法部署到EASY-EAI-Nano需要轉換為RKNN模型,而轉換RKNN之前可以把模型先轉換為ONNX模型,同時會生成best.anchors.txt:
python export.py --include onnx --rknpu RV1126 --weights ./runs/train/exp/weights/best.pt
生成如下圖所示:
7. 轉換為rknn模型環境搭建
onnx模型需要轉換為rknn模型才能在EASY-EAI-Nano運行,所以需要先搭建rknn-toolkit模型轉換工具的環境。當然tensorflow、tensroflow lite、caffe、darknet等也是通過類似的方法進行模型轉換,只是本教程onnx為例。
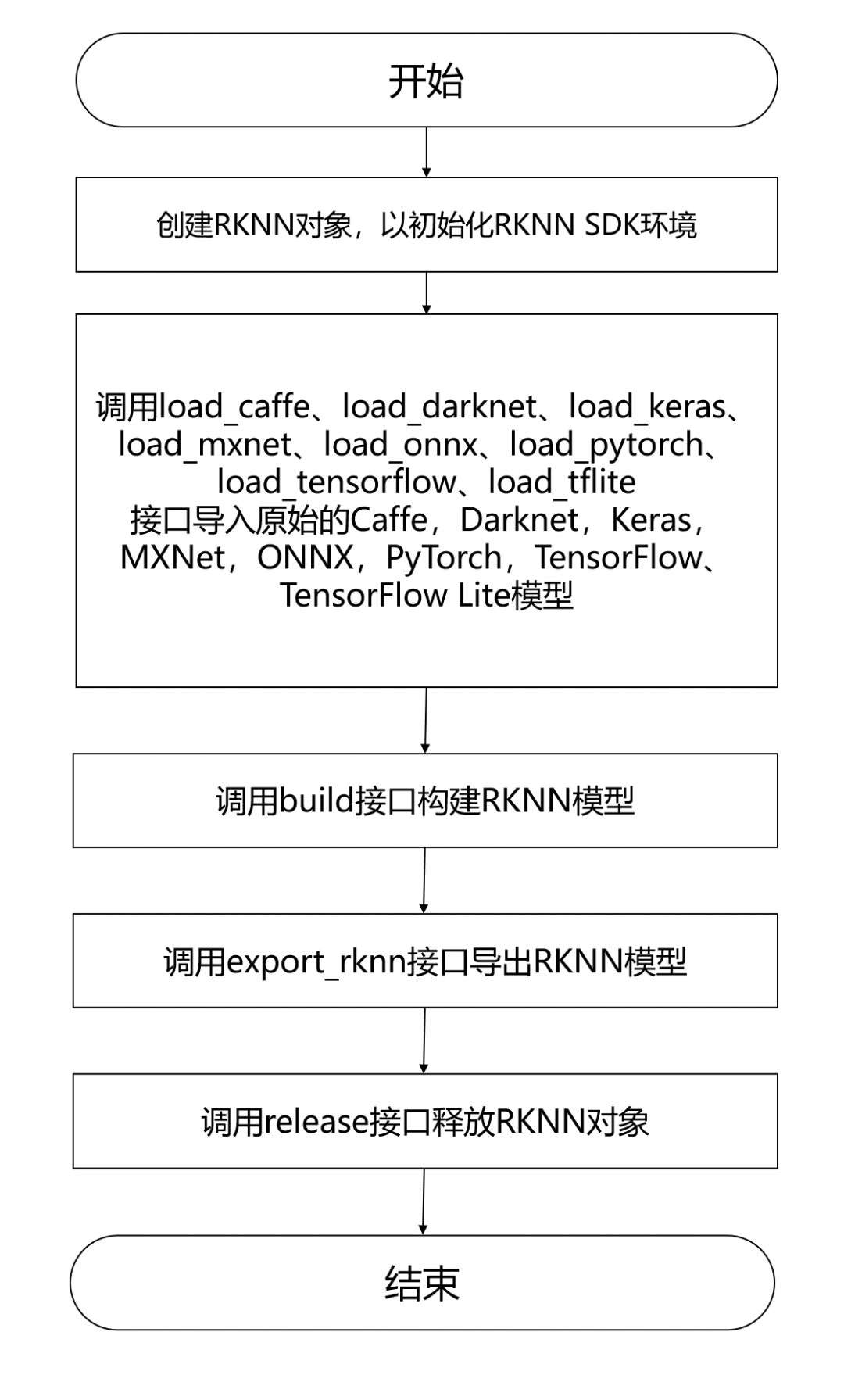
7.1 概述模型轉換環境搭建流程如下所示:

7.2 下載模型轉換工具
為了保證模型轉換工具順利運行,請下載網盤里”AI算法開發/RKNN-Toolkit模型轉換工具/rknn-toolkit-v1.7.1/docker/rknn-toolkit-1.7.1-docker.tar.gz”。網盤下載鏈接:https://pan.baidu.com/s/1LUtU_-on7UB3kvloJlAMkA 提取碼:teuc7.3 把工具移到ubuntu18.04把下載完成的docker鏡像移到我司的虛擬機ubuntu18.04的rknn-toolkit目錄,如下圖所示:
7.4 運行模型轉換工具環境7.4.1 打開終端在該目錄打開終端:

7.4.2 加載docker鏡像執行以下指令加載模型轉換工具docker鏡像:
docker load --input /home/developer/rknn-toolkit/rknn-toolkit-1.7.1-docker.tar.gz
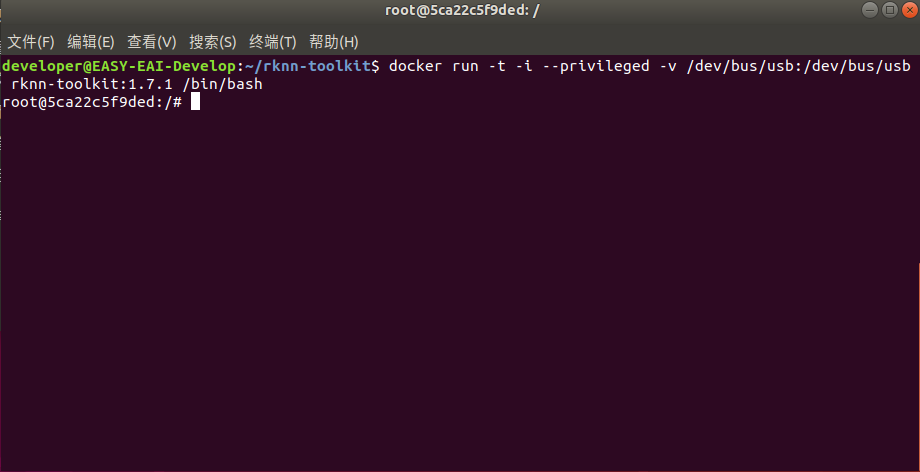
7.4.3 進入鏡像bash環境執行以下指令進入鏡像bash環境:
docker run -t -i --privileged -v /dev/bus/usb:/dev/bus/usb rknn-toolkit:1.7.1 /bin/bash
現象如下圖所示:
7.4.4 測試環境
輸入“python”加載python相關庫,嘗試加載rknn庫,如下圖環境測試成功:
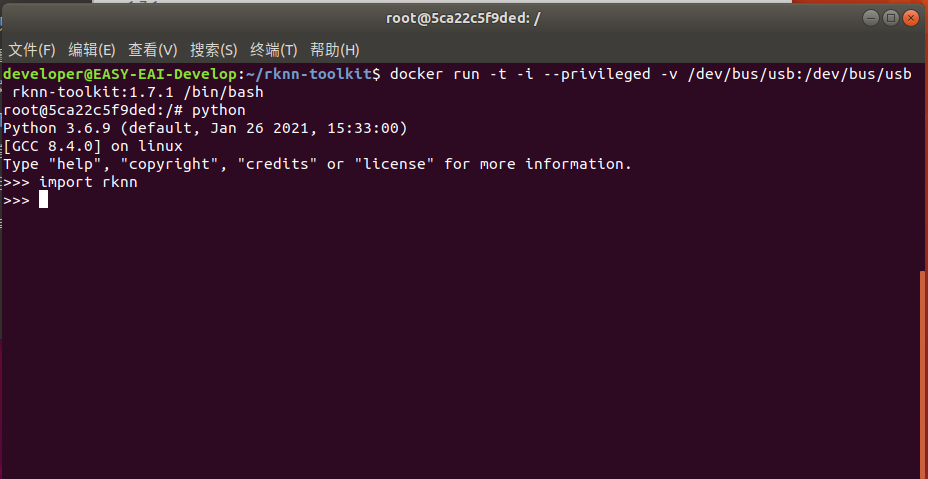
至此,模型轉換工具環境搭建完成。
8. rknn模型轉換流程介紹
EASY EAI Nano支持.rknn后綴的模型的評估及運行,對于常見的tensorflow、tensroflow lite、caffe、darknet、onnx和Pytorch模型都可以通過我們提供的 toolkit 工具將其轉換至 rknn 模型,而對于其他框架訓練出來的模型,也可以先將其轉至 onnx 模型再轉換為 rknn 模型。模型轉換操作流程如下圖所示:
8.1 模型轉換Demo下載
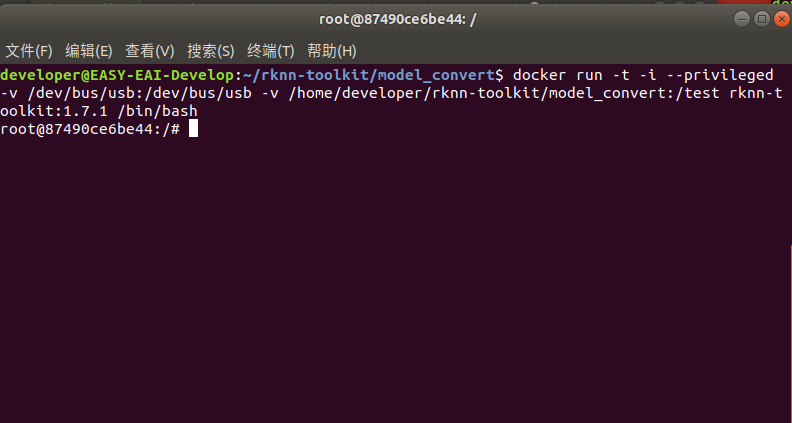
8.2 進入模型轉換工具docker環境執行以下指令把工作區域映射進docker鏡像,其中/home/developer/rknn-toolkit/model_convert為工作區域,/test為映射到docker鏡像,/dev/bus/usb:/dev/bus/usb為映射usb到docker鏡像:
docker run -t -i --privileged -v /dev/bus/usb:/dev/bus/usb -v /home/developer/rknn-toolkit/model_convert:/test rknn-toolkit:1.7.1 /bin/bash
執行成功如下圖所示:
8.3 模型轉換操作說明
8.3.1 模型轉換Demo目錄結構
模型轉換測試Demo由mask_object_detect和quant_dataset組成。coco_object_detect存放軟件腳本,quant_dataset存放量化模型所需的數據。如下圖所示:
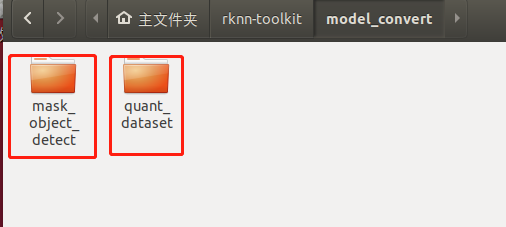
mask_object_detect文件夾存放以下內容
8.3.2 生成量化圖片列表在docker環境切換到模型轉換工作目錄:
cd /test/mask_object_detect/
如下圖所示:
執行gen_list.py生成量化圖片列表:
python gen_list.py
命令行現象如下圖所示:
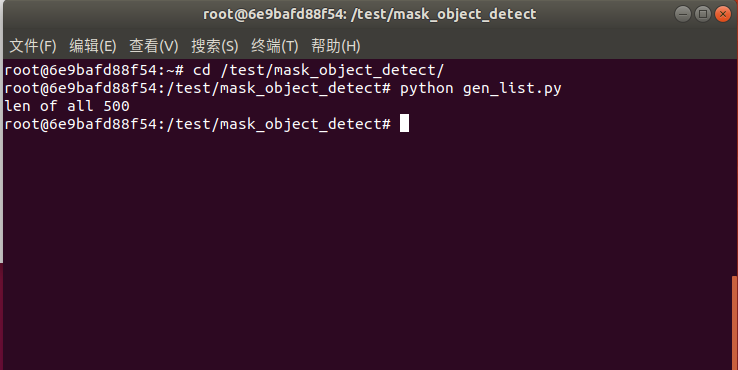
生成“量化圖片列表”
8.3.3 onnx模型轉換為rknn模型rknn_convert.py腳本默認進行int8量化操作,腳本代碼清單如下所示:
import osimport urllibimport tracebackimport timeimport sysimport numpy as npimport cv2from rknn.api import RKNNONNX_MODEL = 'best.onnx'RKNN_MODEL = './yolov5_mask_rv1126.rknn'DATASET = './pic_path.txt'QUANTIZE_ON = Trueif __name__ == '__main__': # Create RKNN object rknn = RKNN(verbose=True) if not os.path.exists(ONNX_MODEL): print('model not exist') exit(-1) # pre-process config print('--> Config model') rknn.config(reorder_channel='0 1 2', mean_values=[[0, 0, 0]], std_values=[[255, 255, 255]], optimization_level=3, target_platform = 'rv1126', output_optimize=1, quantize_input_node=QUANTIZE_ON) print('done') # Load ONNX model print('--> Loading model') ret = rknn.load_onnx(model=ONNX_MODEL) if ret != 0: print('Load yolov5 failed!') exit(ret) print('done') # Build model print('--> Building model') ret = rknn.build(do_quantization=QUANTIZE_ON, dataset=DATASET) if ret != 0: print('Build yolov5 failed!') exit(ret) print('done') # Export RKNN model print('--> Export RKNN model') ret = rknn.export_rknn(RKNN_MODEL) if ret != 0: print('Export yolov5rknn failed!') exit(ret) print('done')
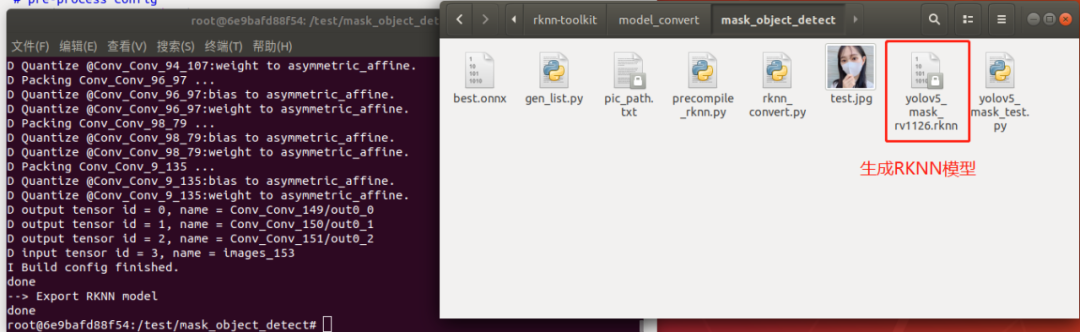
把onnx模型best.onnx放到mask_object_detect目錄,并執行rknn_convert.py腳本進行模型轉換:
python rknn_convert.py
生成模型如下圖所示,此模型可以在rknn環境和EASY EAI Nano環境運行:
8.3.4 運行rknn模型用yolov5_mask_test.py腳本在PC端的環境下可以運行rknn的模型,如下圖所示:
yolov5_mask_test.py腳本程序清單如下所示:
import osimport urllibimport tracebackimport timeimport sysimport numpy as npimport cv2import randomfrom rknn.api import RKNNRKNN_MODEL = 'yolov5_mask_rv1126.rknn'IMG_PATH = './test.jpg'DATASET = './dataset.txt'BOX_THRESH = 0.25NMS_THRESH = 0.6IMG_SIZE = 640CLASSES = ("head", "mask")def sigmoid(x): return 1 / (1 + np.exp(-x))def xywh2xyxy(x): # Convert [x, y, w, h] to [x1, y1, x2, y2] y = np.copy(x) y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y return ydef process(input, mask, anchors): anchors = [anchors[i] for i in mask] grid_h, grid_w = map(int, input.shape[0:2]) box_confidence = sigmoid(input[..., 4]) box_confidence = np.expand_dims(box_confidence, axis=-1) box_class_probs = sigmoid(input[..., 5:]) box_xy = sigmoid(input[..., :2])*2 - 0.5 col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w) row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h) col = col.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2) row = row.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2) grid = np.concatenate((col, row), axis=-1) box_xy += grid box_xy *= int(IMG_SIZE/grid_h) box_wh = pow(sigmoid(input[..., 2:4])*2, 2) box_wh = box_wh * anchors box = np.concatenate((box_xy, box_wh), axis=-1) return box, box_confidence, box_class_probsdef filter_boxes(boxes, box_confidences, box_class_probs): """Filter boxes with box threshold. It's a bit different with origin yolov5 post process! # Arguments boxes: ndarray, boxes of objects. box_confidences: ndarray, confidences of objects. box_class_probs: ndarray, class_probs of objects. # Returns boxes: ndarray, filtered boxes. classes: ndarray, classes for boxes. scores: ndarray, scores for boxes. """ box_scores = box_confidences * box_class_probs box_classes = np.argmax(box_class_probs, axis=-1) box_class_scores = np.max(box_scores, axis=-1) pos = np.where(box_confidences[...,0] >= BOX_THRESH) boxes = boxes[pos] classes = box_classes[pos] scores = box_class_scores[pos] return boxes, classes, scoresdef nms_boxes(boxes, scores): """Suppress non-maximal boxes. # Arguments boxes: ndarray, boxes of objects. scores: ndarray, scores of objects. # Returns keep: ndarray, index of effective boxes. """ x = boxes[:, 0] y = boxes[:, 1] w = boxes[:, 2] - boxes[:, 0] h = boxes[:, 3] - boxes[:, 1] areas = w * h order = scores.argsort()[::-1] keep = [] while order.size > 0: i = order[0] keep.append(i) xx1 = np.maximum(x[i], x[order[1:]]) yy1 = np.maximum(y[i], y[order[1:]]) xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]]) yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]]) w1 = np.maximum(0.0, xx2 - xx1 + 0.00001) h1 = np.maximum(0.0, yy2 - yy1 + 0.00001) inter = w1 * h1 ovr = inter / (areas[i] + areas[order[1:]] - inter) inds = np.where(ovr <= NMS_THRESH)[0] order = order[inds + 1] keep = np.array(keep) return keepdef yolov5_post_process(input_data): masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]] anchors = [[10, 13], [16, 30], [33, 23], [30, 61], [62, 45], [59, 119], [116, 90], [156, 198], [373, 326]] boxes, classes, scores = [], [], [] for input,mask in zip(input_data, masks): b, c, s = process(input, mask, anchors) b, c, s = filter_boxes(b, c, s) boxes.append(b) classes.append(c) scores.append(s) boxes = np.concatenate(boxes) boxes = xywh2xyxy(boxes) classes = np.concatenate(classes) scores = np.concatenate(scores) nboxes, nclasses, nscores = [], [], [] for c in set(classes): inds = np.where(classes == c) b = boxes[inds] c = classes[inds] s = scores[inds] keep = nms_boxes(b, s) nboxes.append(b[keep]) nclasses.append(c[keep]) nscores.append(s[keep]) if not nclasses and not nscores: return None, None, None boxes = np.concatenate(nboxes) classes = np.concatenate(nclasses) scores = np.concatenate(nscores) return boxes, classes, scoresdef scale_coords(x1, y1, x2, y2, dst_width, dst_height): dst_top, dst_left, dst_right, dst_bottom = 0, 0, 0, 0 gain = 0 if dst_width > dst_height: image_max_len = dst_width gain = IMG_SIZE / image_max_len resized_height = dst_height * gain height_pading = (IMG_SIZE - resized_height)/2 print("height_pading:", height_pading) y1 = (y1 - height_pading) y2 = (y2 - height_pading) print("gain:", gain) dst_x1 = int(x1 / gain) dst_y1 = int(y1 / gain) dst_x2 = int(x2 / gain) dst_y2 = int(y2 / gain) return dst_x1, dst_y1, dst_x2, dst_y2def plot_one_box(x, img, color=None, label=None, line_thickness=None): tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness color = color or [random.randint(0, 255) for _ in range(3)] c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3])) cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA) if label: tf = max(tl - 1, 1) # font thickness t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0] c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3 cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)def draw(image, boxes, scores, classes): """Draw the boxes on the image. # Argument: image: original image. boxes: ndarray, boxes of objects. classes: ndarray, classes of objects. scores: ndarray, scores of objects. all_classes: all classes name. """ for box, score, cl in zip(boxes, scores, classes): x1, y1, x2, y2 = box print('class: {}, score: {}'.format(CLASSES[cl], score)) print('box coordinate x1,y1,x2,y2: [{}, {}, {}, {}]'.format(x1, y1, x2, y2)) x1 = int(x1) y1 = int(y1) x2 = int(x2) y2 = int(y2) dst_x1, dst_y1, dst_x2, dst_y2 = scale_coords(x1, y1, x2, y2, image.shape[1], image.shape[0]) #print("img.cols:", image.cols) plot_one_box((dst_x1, dst_y1, dst_x2, dst_y2), image, label='{0} {1:.2f}'.format(CLASSES[cl], score)) ''' cv2.rectangle(image, (dst_x1, dst_y1), (dst_x2, dst_y2), (255, 0, 0), 2) cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score), (dst_x1, dst_y1 - 6), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 2) '''def letterbox(im, new_shape=(640, 640), color=(0, 0, 0)): # Resize and pad image while meeting stride-multiple constraints shape = im.shape[:2] # current shape [height, width] if isinstance(new_shape, int): new_shape = (new_shape, new_shape) # Scale ratio (new / old) r = min(new_shape[0] / shape[0], new_shape[1] / shape[1]) # Compute padding ratio = r, r # width, height ratios new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r)) dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding dw /= 2 # divide padding into 2 sides dh /= 2 if shape[::-1] != new_unpad: # resize im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR) top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1)) left, right = int(round(dw - 0.1)), int(round(dw + 0.1)) im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border return im, ratio, (dw, dh)if __name__ == '__main__': # Create RKNN object rknn = RKNN(verbose=True) print('--> Loading model') ret = rknn.load_rknn(RKNN_MODEL) if ret != 0: print('load rknn model failed') exit(ret) print('done') # init runtime environment print('--> Init runtime environment') ret = rknn.init_runtime() # ret = rknn.init_runtime('rv1126', device_id='1126') if ret != 0: print('Init runtime environment failed') exit(ret) print('done') # Set inputs img = cv2.imread(IMG_PATH) letter_img, ratio, (dw, dh) = letterbox(img, new_shape=(IMG_SIZE, IMG_SIZE)) letter_img = cv2.cvtColor(letter_img, cv2.COLOR_BGR2RGB) # Inference print('--> Running model') outputs = rknn.inference(inputs=[letter_img]) print('--> inference done') # post process input0_data = outputs[0] input1_data = outputs[1] input2_data = outputs[2] input0_data = input0_data.reshape([3,-1]+list(input0_data.shape[-2:])) input1_data = input1_data.reshape([3,-1]+list(input1_data.shape[-2:])) input2_data = input2_data.reshape([3,-1]+list(input2_data.shape[-2:])) input_data = list() input_data.append(np.transpose(input0_data, (2, 3, 0, 1))) input_data.append(np.transpose(input1_data, (2, 3, 0, 1))) input_data.append(np.transpose(input2_data, (2, 3, 0, 1))) print('--> transpose done') boxes, classes, scores = yolov5_post_process(input_data) print('--> get result done') #img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR) if boxes is not None: draw(img, boxes, scores, classes) cv2.imwrite('./result.jpg', img) #cv2.imshow("post process result", img_1) #cv2.waitKeyEx(0) rknn.release()
8.3.5 模型預編譯
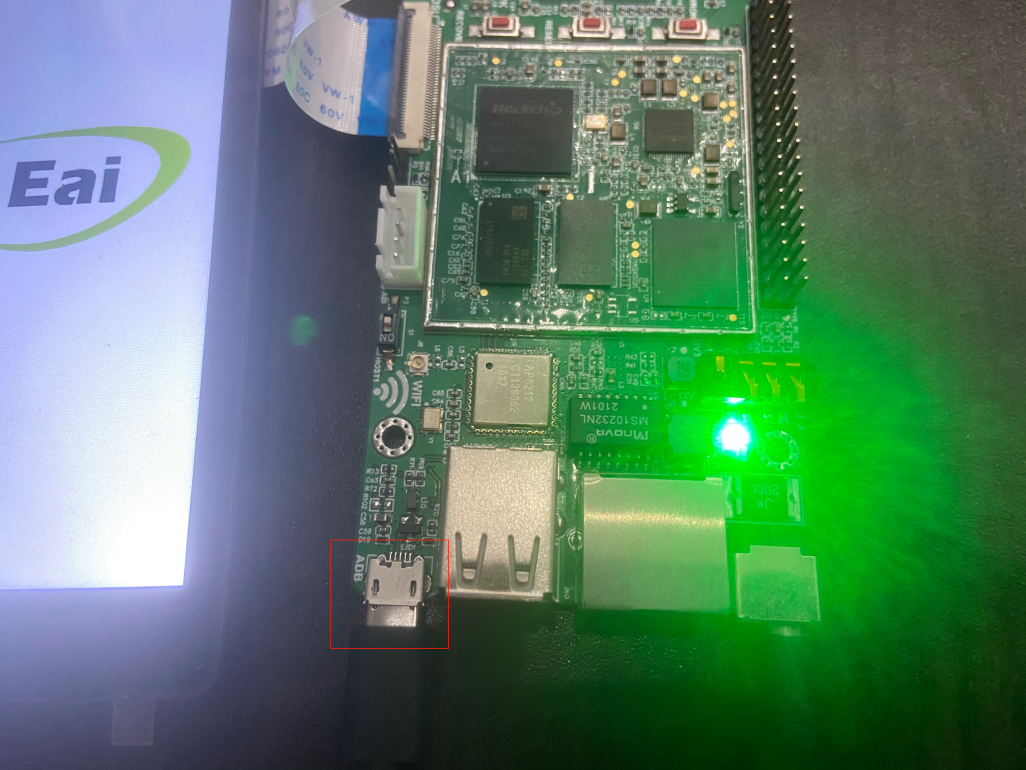
由于rknn模型用NPU API在EASY EAI Nano加載的時候啟動速度會好慢,在評估完模型精度沒問題的情況下,建議進行模型預編譯。預編譯的時候需要通過EASY EAI Nano主板的環境,所以請務必接上adb口與ubuntu保證穩定連接。板子端接線如下圖所示,撥碼開關需要是adb:
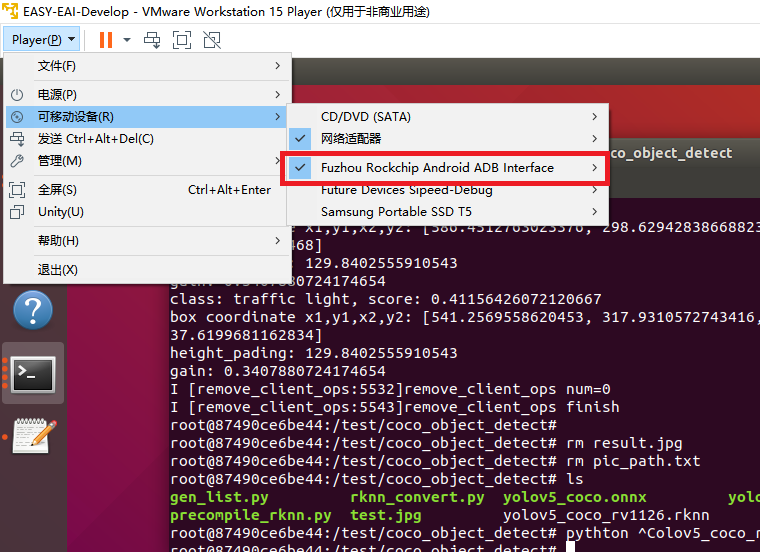
虛擬機要保證接上adb設備:
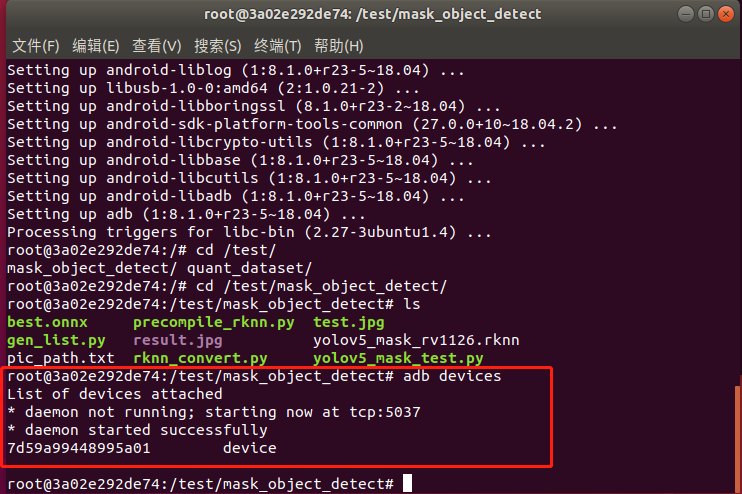
由于在虛擬機里ubuntu環境與docker環境對adb設備資源是競爭關系,所以需要關掉ubuntu環境下的adb服務,且在docker里面通過apt-get安裝adb軟件包。以下指令在ubuntu環境與docker環境里各自執行:

在docker環境里執行adb devices,現象如下圖所示則設備連接成功:
運行precompile_rknn.py腳本把模型執行預編譯:
python precompile_rknn.py
執行效果如下圖所示,生成預編譯模型yolov5_mask_rv1126_pre.rknn:
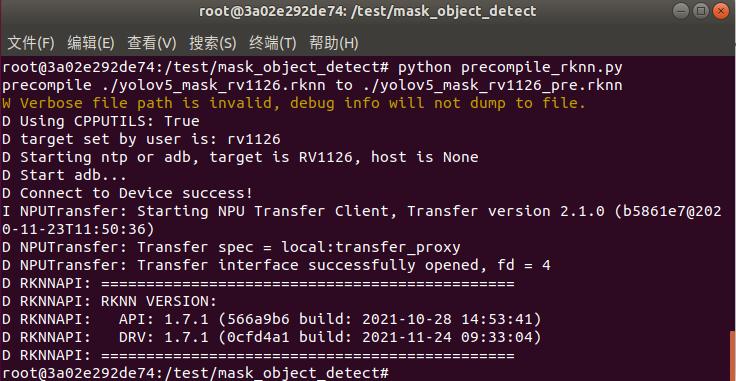
至此預編譯部署完成,模型轉換步驟已全部完成。
9. 模型部署示例
9.1 模型部署示例介紹
本小節展示yolov5模型的在EASY EAI Nano的部署過程,該模型僅經過簡單訓練供示例使用,不保證模型精度。
9.2 準備工作
9.2.1 硬件準備
EASY EAI Nano開發板,microUSB數據線,帶linux操作系統的電腦。需保證EASY EAI Nano與linux系統保持adb連接。9.2.2 交叉編譯環境準備
本示例需要交叉編譯環境的支持,可以參考在線文檔“入門指南/開發環境準備/安裝交叉編譯工具鏈”。鏈接為//www.easy-eai.com/document_details/3/135。
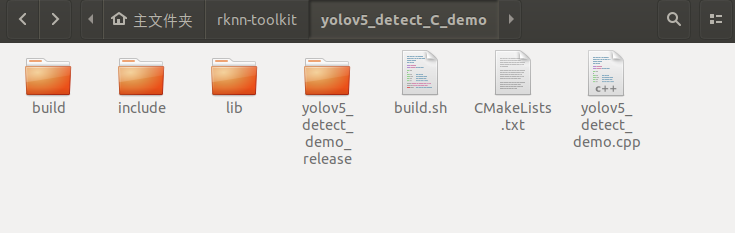
9.2.3 文件下載
下載yolov5 C Demo示例文件。百度網盤鏈接:https://pan.baidu.com/s/1XmxU9Putp_qSYTSQPqxMDQ提取碼:6666下載解壓后如下圖所示:
9.3 在EASY EAI Nano運行yolov5 demo9.3.1 解壓yolov5 demo下載程序包移至ubuntu環境后,執行以下指令解壓:
tar -xvf yolov5_detect_C_demo.tar.bz2
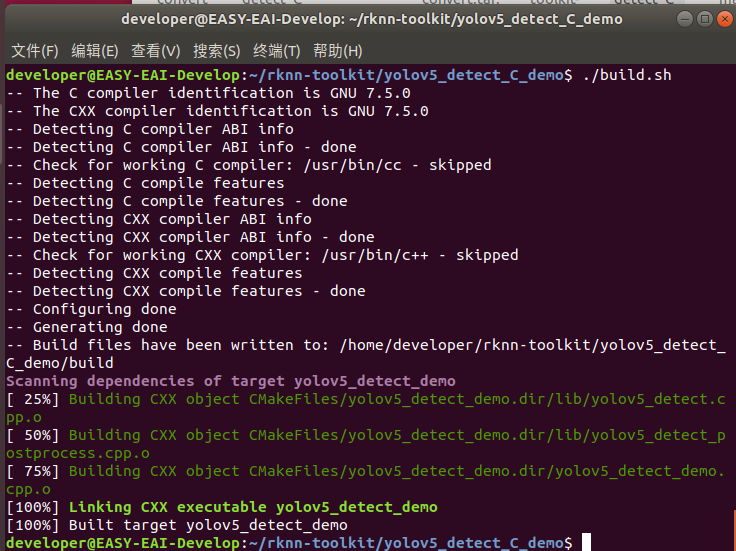
9.3.2 編譯yolov5 demo執行以下腳本編譯demo:
./build.sh
編譯成功后如下圖所示:
9.3.3 執行yolov5 demo執行以下指令把可執行程序推送到開發板端:
adb push yolov5_detect_demo_release/ /userdata
登錄到開發板執行程序:
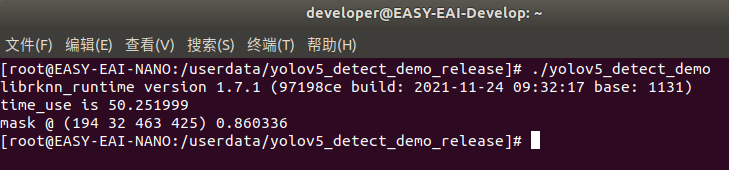
adb shell cd /userdata/yolov5_detect_demo_release/./yolov5_detect_demo
執行結果如下圖所示,算法執行時間為50ms:
取回測試圖片:
adb pull /userdata/yolov5_detect_demo_release/result.jpg .
10. 基于攝像頭的AI Demo
10.1 攝像頭Demo介紹
本小節展示yolov5模型的在EASY EAI Nano執行攝像頭Demo的過程,該模型僅經過簡單訓練供示例使用,不保證模型精度。
10.2 準備工作10.2.1 硬件準備
EASY-EAI-Nano人工智能開發套件(包括:EASY EAI Nano開發板,雙目攝像頭,5寸高清屏幕,microUSB數據線),帶linux操作系統的電腦,。需保證EASY EAI Nano與linux系統保持adb連接。
10.2.2 交叉編譯環境準備
本示例需要交叉編譯環境的支持,可以參考在線文檔“入門指南/開發環境準備/安裝交叉編譯工具鏈”。
10.2.3 文件下載
攝像頭識別Demo的程序源碼可以通過百度網盤下載:
https://pan.baidu.com/s/18cAp4yT_LhDZ5XAHG-L1lw(提取碼:6666 )。下載解壓后如下圖所示:
10.3 在EASY EAI Nano運行yolov5 demo10.3.1 解壓yolov5 camera demo下載程序包移至ubuntu環境后,執行以下指令解壓:
tar -xvf yolov5_detect_camera_demo.tar.tar.bz2
10.3.2 編譯yolov5 camera demo執行以下腳本編譯demo:
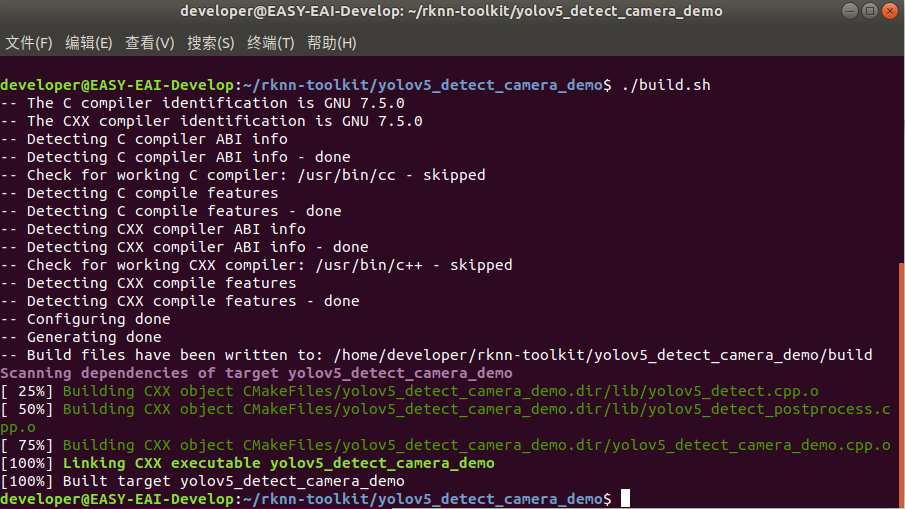
./build.sh
編譯成功后如下圖所示:
10.3.3 執行yolov5 camera demo執行以下指令把可執行程序推送到開發板端:
adb push yolov5_detect_camera_demo_release/ /userdata
登錄到開發板執行程序:
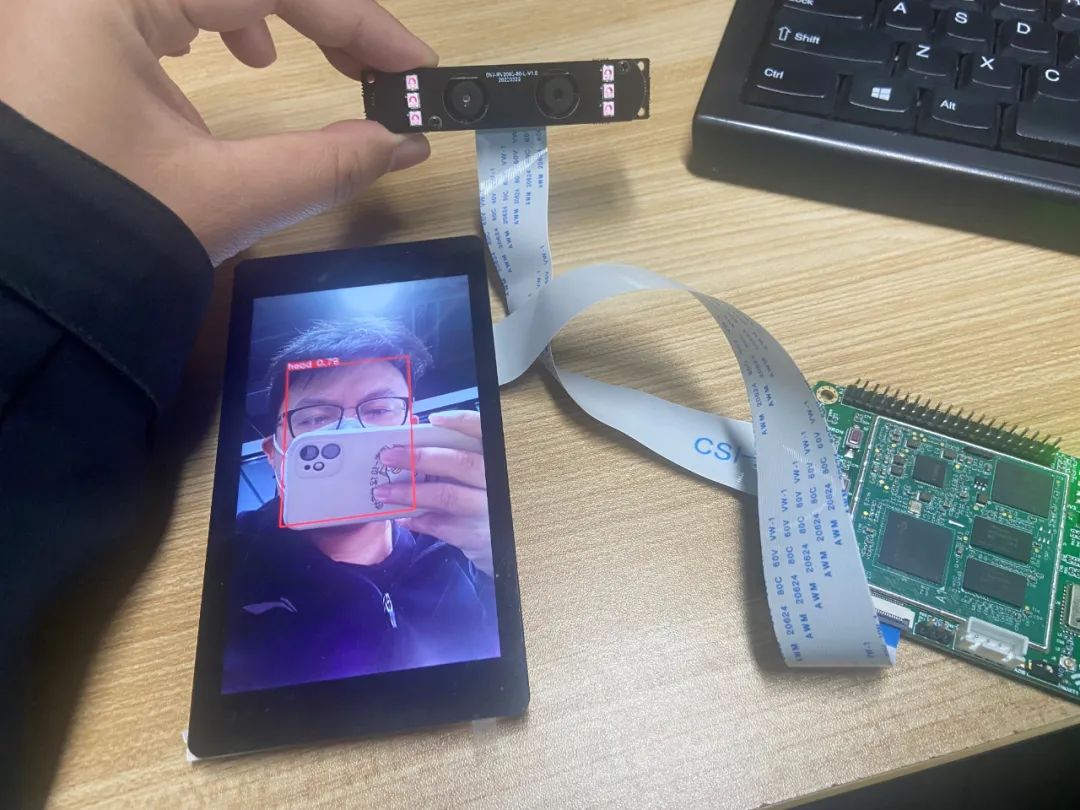
adb shellcd /userdata/yolov5_detect_camera_demo_release/./yolov5_detect_camera_demo
測試結果如下圖所示:
11. 資料下載
| 資料名稱 | 鏈接 |
| 訓練代碼github | https://github.com/EASY-EAI/yolov5 |
| 算法教程完整源碼包 | https://pan.baidu.com/s/1-78z8joPYOaGEVFg0I_WZA 提取碼:6666 |
| 硬件外設庫源碼github | https://github.com/EASY-EAI/EASY-EAI-Toolkit-C-SDK |
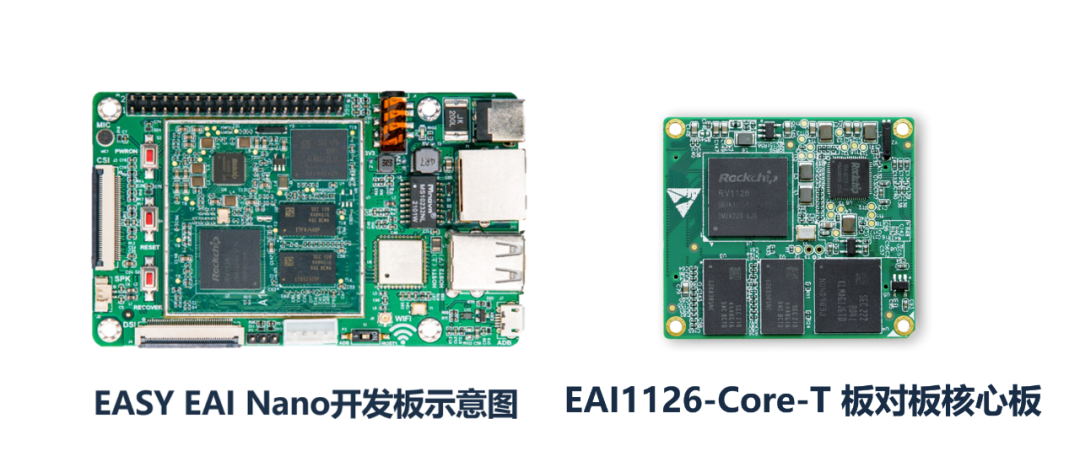
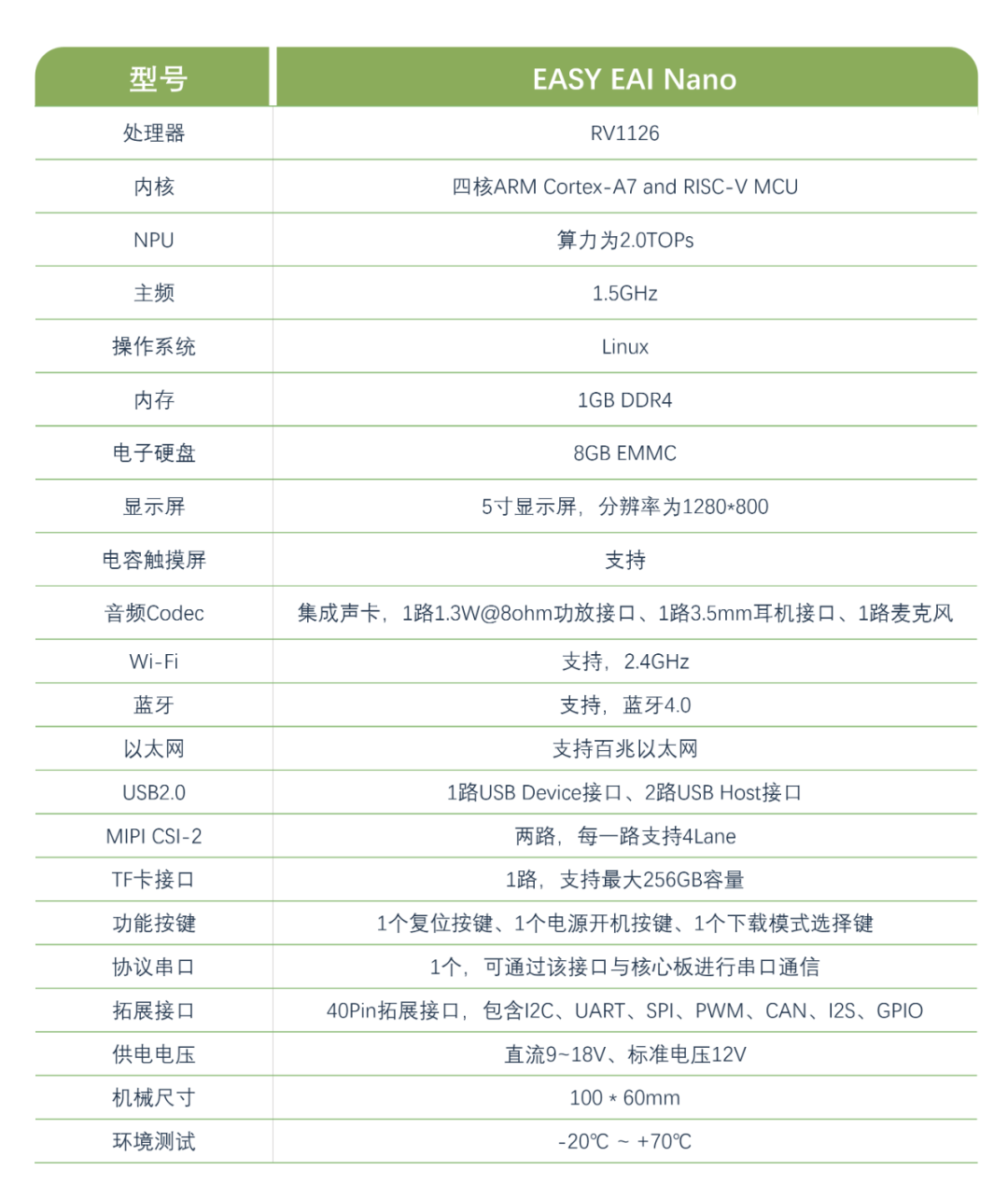
12. 硬件使用
本教程使用的是EASY EAI nano(RV1126)開發板EASY EAI Nano是基于瑞芯微RV1126 處理器設計,具有四核CPU@1.5GHz與NPU@2Tops AI邊緣計算能力。實現AI運算的功耗不及所需GPU的10%。配套AI算法工具完善,支持Tensorflow、Pytorch、Caffe、MxNet、DarkNet、ONNX等主流AI框架直接轉換和部署。有豐富的軟硬件開發資料,而且外設資源豐富,接口齊全,還有豐富的功能配件可供選擇。集成有以太網、Wi-Fi 等通信外設。攝像頭、顯示屏(帶電容觸摸)、喇叭、麥克風等交互外設。2 路 USB Host 接口、1 路 USB Device 調試接口。集成協議串口、TF 卡、IO 拓展接口(兼容樹莓派/Jetson nano拓展接口)等通用外設。內置人臉識別、安全帽監測、人體骨骼點識別、火焰檢測、車輛檢測等各類 AI 算法,并提供完整的 Linux 開發包供客戶二次開發。
-
AI
+關注
關注
88文章
35319瀏覽量
280721 -
目標檢測
+關注
關注
0文章
228瀏覽量
16040
發布評論請先 登錄
Yolov5算法解讀
【YOLOv5】LabVIEW+TensorRT的yolov5部署實戰(含源碼)
yolov5轉onnx在cubeAI進行部署,部署失敗的原因?
請問如何在imx8mplus上部署和運行YOLOv5訓練的模型?
龍哥手把手教你學視覺-深度學習YOLOV5篇
怎樣使用PyTorch Hub去加載YOLOv5模型
如何YOLOv5測試代碼?
yolov5轉onnx在cubeAI進行部署的時候失敗了是什么原因造成的?

在C++中使用OpenVINO工具包部署YOLOv5模型
使用旭日X3派的BPU部署Yolov5

【教程】yolov5訓練部署全鏈路教程

YOLOv5網絡結構訓練策略詳解
在樹莓派上部署YOLOv5進行動物目標檢測的完整流程






 工商網監
工商網監
評論