") 解密電機(jī)“智慧大腦”:FOC控制如何讓機(jī)器運(yùn)轉(zhuǎn)更聰明
解密電機(jī)“智慧大腦”:FOC控制如何讓機(jī)器運(yùn)轉(zhuǎn)更聰明

在工業(yè)機(jī)器人精準(zhǔn)抓取零件的瞬間,在電動(dòng)汽車平穩(wěn)加速的時(shí)刻,在無(wú)人機(jī)懸停于空中的剎那,一套名為FOC的“智慧算法”正默默指揮著電機(jī)運(yùn)轉(zhuǎn)。這項(xiàng)誕生于20世紀(jì)70年代的電機(jī)控制技術(shù),如今已成為高端制造領(lǐng)域的核心驅(qū)動(dòng)力,讓電機(jī)從“機(jī)械苦力”進(jìn)化為“智能舞者”。
一、從機(jī)械換向到電子操控:FOC的誕生背景
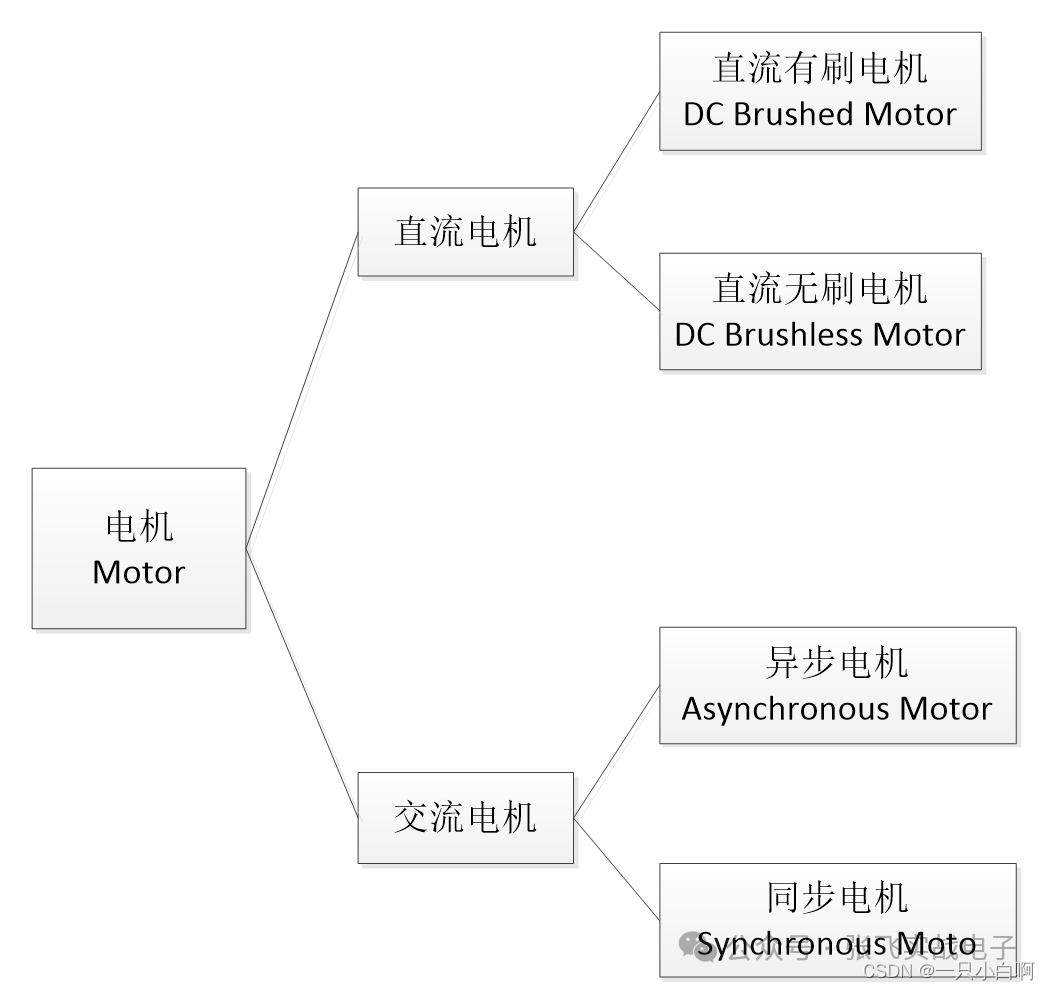
傳統(tǒng)有刷電機(jī)通過(guò)碳刷與換向器接觸實(shí)現(xiàn)電流換向,但摩擦產(chǎn)生的火花與噪音,如同老式打字機(jī)的敲擊聲,暴露出效率低下與壽命短暫的缺陷。而無(wú)刷電機(jī)的出現(xiàn),用電子換向器替代機(jī)械結(jié)構(gòu),卻帶來(lái)新的挑戰(zhàn):如何精準(zhǔn)控制三相電流的相位與幅值,讓定子磁場(chǎng)始終與轉(zhuǎn)子磁場(chǎng)保持最佳角度?
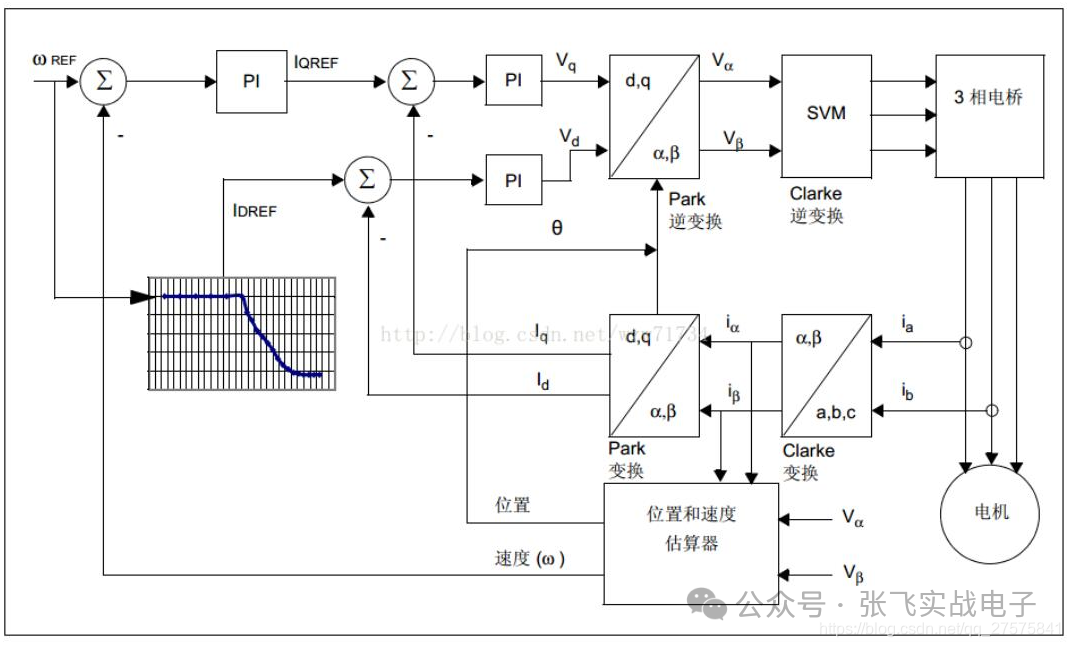
FOC(Field-Oriented Control,磁場(chǎng)定向控制)的誕生解決了這一難題。它通過(guò)坐標(biāo)變換將三相交流電分解為兩個(gè)正交分量——與磁場(chǎng)平行的d軸電流和與轉(zhuǎn)矩垂直的q軸電流,實(shí)現(xiàn)對(duì)磁場(chǎng)與轉(zhuǎn)矩的獨(dú)立控制。這一過(guò)程猶如將三維空間中的旋轉(zhuǎn)矢量投影到二維平面,再通過(guò)數(shù)學(xué)運(yùn)算還原出精確的控制指令。
二、FOC的“三重魔法”:解耦、閉環(huán)與調(diào)制
1. 坐標(biāo)變換:從混沌到有序
FOC的核心在于將三相靜止坐標(biāo)系下的電流,通過(guò)Clark變換轉(zhuǎn)換為兩相靜止坐標(biāo)系,再經(jīng)Park變換映射到與轉(zhuǎn)子同步旋轉(zhuǎn)的dq坐標(biāo)系。這一過(guò)程如同將旋轉(zhuǎn)的陀螺軌跡分解為水平與垂直分量:在dq坐標(biāo)系中,d軸電流控制磁場(chǎng)強(qiáng)度,q軸電流控制轉(zhuǎn)矩大小,兩者解耦后實(shí)現(xiàn)獨(dú)立調(diào)節(jié)。
以電動(dòng)汽車驅(qū)動(dòng)電機(jī)為例,當(dāng)車輛爬坡時(shí),F(xiàn)OC可同時(shí)增大d軸電流(增強(qiáng)磁場(chǎng))和q軸電流(增加轉(zhuǎn)矩),而傳統(tǒng)控制方式需在兩者間權(quán)衡妥協(xié)。
2. 三環(huán)控制:精密調(diào)節(jié)的“俄羅斯套娃”
FOC采用電流環(huán)、速度環(huán)、位置環(huán)的三層閉環(huán)結(jié)構(gòu):
電流環(huán):通過(guò)ADC采樣實(shí)時(shí)監(jiān)測(cè)三相電流,經(jīng)坐標(biāo)變換后與設(shè)定值比較,PID控制器輸出調(diào)節(jié)電壓信號(hào)。這一過(guò)程如同廚師用溫度計(jì)精準(zhǔn)控制火候,確保電流波動(dòng)小于1%。
速度環(huán):編碼器反饋電機(jī)轉(zhuǎn)速,與目標(biāo)值比較后調(diào)整q軸電流設(shè)定值。在工業(yè)機(jī)器人關(guān)節(jié)控制中,速度環(huán)可使電機(jī)在0.01秒內(nèi)響應(yīng)指令變化。
位置環(huán):通過(guò)絕對(duì)式編碼器獲取轉(zhuǎn)子角度,直接修正電流環(huán)設(shè)定值。在CNC機(jī)床中,位置環(huán)誤差可控制在0.001毫米以內(nèi)。
3. SVPWM調(diào)制:空間矢量的“舞蹈編排”
傳統(tǒng)PWM通過(guò)調(diào)節(jié)占空比控制電壓,而SVPWM(空間矢量脈寬調(diào)制)將八個(gè)基本電壓矢量(六個(gè)非零矢量+兩個(gè)零矢量)組合成任意方向的合成矢量。這一過(guò)程猶如指揮交響樂(lè)團(tuán):通過(guò)計(jì)算相鄰矢量的作用時(shí)間,在每個(gè)載波周期(通常20kHz)內(nèi)合成所需電壓波形,使電機(jī)電流諧波失真降低40%。
三、從實(shí)驗(yàn)室到生產(chǎn)線:FOC的實(shí)戰(zhàn)應(yīng)用
1. 電動(dòng)汽車:續(xù)航與動(dòng)力的平衡術(shù)
特斯拉Model 3的驅(qū)動(dòng)電機(jī)采用FOC控制,通過(guò)動(dòng)態(tài)調(diào)節(jié)d軸電流實(shí)現(xiàn)弱磁控制。當(dāng)車速超過(guò)120km/h時(shí),系統(tǒng)主動(dòng)削弱磁場(chǎng)強(qiáng)度,使電機(jī)在更高轉(zhuǎn)速下仍能輸出最大功率,續(xù)航里程提升8%。
2. 工業(yè)機(jī)器人:微米級(jí)精度的秘密
發(fā)那科協(xié)作機(jī)器人關(guān)節(jié)電機(jī)使用FOC控制,結(jié)合24位絕對(duì)式編碼器,實(shí)現(xiàn)0.001°的位置精度。在電子元件裝配場(chǎng)景中,F(xiàn)OC的快速電流環(huán)(帶寬達(dá)2kHz)可抑制機(jī)械臂啟動(dòng)時(shí)的抖動(dòng),將裝配誤差控制在頭發(fā)絲直徑的1/50。
3. 無(wú)人機(jī):抗風(fēng)擾動(dòng)的“隱形翅膀”
大疆Mavic 3的云臺(tái)電機(jī)采用無(wú)傳感器FOC控制,通過(guò)反電動(dòng)勢(shì)觀測(cè)器估算轉(zhuǎn)子位置。在6級(jí)風(fēng)環(huán)境下,F(xiàn)OC的強(qiáng)魯棒性使云臺(tái)保持水平,確保拍攝畫(huà)面穩(wěn)定如地面拍攝。
四、未來(lái)已來(lái):FOC的智能化進(jìn)化
隨著AI技術(shù)的滲透,F(xiàn)OC控制正經(jīng)歷新一輪變革:
模型預(yù)測(cè)控制(MPC):通過(guò)建立電機(jī)數(shù)學(xué)模型,提前預(yù)測(cè)未來(lái)狀態(tài)并優(yōu)化控制量,使動(dòng)態(tài)響應(yīng)速度提升3倍。
深度學(xué)習(xí)觀測(cè)器:用神經(jīng)網(wǎng)絡(luò)替代傳統(tǒng)PID控制器,在電機(jī)參數(shù)變化時(shí)自動(dòng)調(diào)整參數(shù),適應(yīng)性強(qiáng)。
集成化芯片:TI的C2000系列MCU將FOC算法硬化,配合DRV8323驅(qū)動(dòng)芯片,使控制板面積縮小60%,成本降低40%。
從工廠車間到家庭廚房,F(xiàn)OC控制正重塑人類與機(jī)器的交互方式。它不僅是電機(jī)控制的革命,更是工業(yè)智能化轉(zhuǎn)型的縮影——當(dāng)算法能夠理解物理世界的運(yùn)行法則,機(jī)器便真正擁有了“智慧”。下一次當(dāng)你看到機(jī)器人流暢地完成復(fù)雜動(dòng)作時(shí),不妨想起這個(gè)隱藏在電機(jī)背后的“智慧大腦”,它正在用數(shù)學(xué)的語(yǔ)言,書(shū)寫(xiě)著工業(yè)文明的詩(shī)篇。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29779瀏覽量
213219 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9313瀏覽量
149730 -
FOC
+關(guān)注
關(guān)注
21文章
350瀏覽量
44409
發(fā)布評(píng)論請(qǐng)先 登錄
處處可見(jiàn)的FOC驅(qū)動(dòng)電機(jī)技術(shù)


FOC控制算法詳解
從零開(kāi)始之電機(jī)FOC控制
智慧光伏運(yùn)維管理系統(tǒng)讓電站更聰明更省心
簡(jiǎn)體中文版 永磁同步電機(jī)磁場(chǎng)定向控制 (PMSM FOC)軟件庫(kù) V2.0
電機(jī)驅(qū)動(dòng) C 位技術(shù):有感 FOC 與無(wú)感 FOC 的本質(zhì)區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論