 【應用】PS-CZ00001 Force Sensor “硬幣”式觸力傳感器在手術機器人中的應用
【應用】PS-CZ00001 Force Sensor “硬幣”式觸力傳感器在手術機器人中的應用

由于機器人手術的高度精準性,在外科微創手術中,醫生已經廣泛認可了這種手術方式。筆者主要通過本文與大家分享應用在脊柱微創手術中使用的手術機器人的骨鉆部分的傳感器推薦。但其也存在一定的局限性,以脊柱微創手術為例,使用手術機器人進行手術時,盡管目前的手術機器人都采用了視覺反饋系統,但醫生無法對病人進行觸診,即缺少力觸反饋信息,從而增加了手術的不確定性風險,此外,視覺信息是可以提供部分觸覺信息的,但是醫生需要對視覺信息進行分析,這無疑會延長手術時間,也會給醫生帶來不必要的干擾。
力觸覺反饋系統包括力反饋系統和觸覺反饋系統。力觸覺反饋在提供給機器人合適的力的同時還能給醫生提供實操的感覺,就像自己用手做手術一樣。這里,我們主要介紹脊柱微創手術,在進行微創手術時,需要進行骨磨鉆等操作,以便后續醫生進行植釘等一系列后續工作。由于脊柱中含有眾多神經,如果不加力傳感器,極有可能傷到脊柱錐孔的神經,從而導致嚴重的后果。因此,我們需要對骨鉆操作時加入力傳感器,采集力信號,以便醫生操作機械手臂時合理控制磨削的力度。這里我們需要一款高精度,小巧輕便的力傳感器。并且在設計力傳感器時還必須考慮到其設計成本,組織相容性以及可消毒性等特點.
安費諾推出的PS-CZ00001 Series Force Sensor 力傳感器采用了“硬幣”式設計,體型小巧且不容易形變,這一點對于脊柱微創手術十分重要,因為手術用到的鉆頭并不大,體型過大的力傳感器并不適合于此類手術,PS-CZ00001 Force Sensor 采用了安費諾傳感器獨特的“高度可靠的玻璃微聚變”(HRGM)工藝,這是最初是為航空工業開發的。基于微機械壓阻應變原理,將一種特殊的玻璃基硅應變計在高溫下融合到不銹鋼隔膜片上。與傳統的環氧樹脂相比,HRGM工藝可以減少材料的滯后和蠕變,提高力傳感器的使用壽命,提高延長期限的穩定性。PS-CZ00001是一種高靈敏度的力傳感器,具有優異的高過載能力,在出現任何意外的力峰值時非常有用。
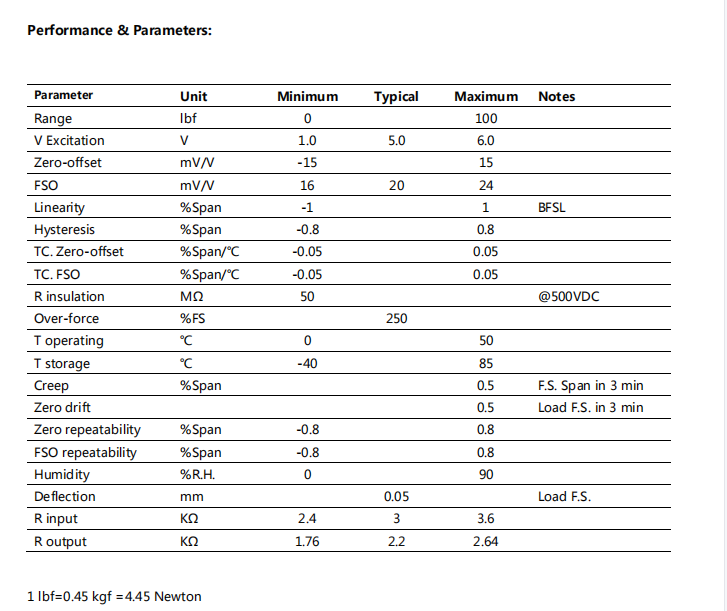
脊柱微創手術中所要測量的力大約在60-90N之間,PS-CZ00001 Force Sensor的量程范圍是0到445N,能夠充分滿足我們的需求,其激勵電源為5V,非線性的范圍為-1~1%FSO,最大過載可以達到250%FS。其磁滯現象在-0.8~+0.8%Span性能表現優異,而且其操作溫度范圍在0到50°C,儲存溫度在-40°C到+85°C之間,便于保存。各種參數都比較適合用于手術操作。
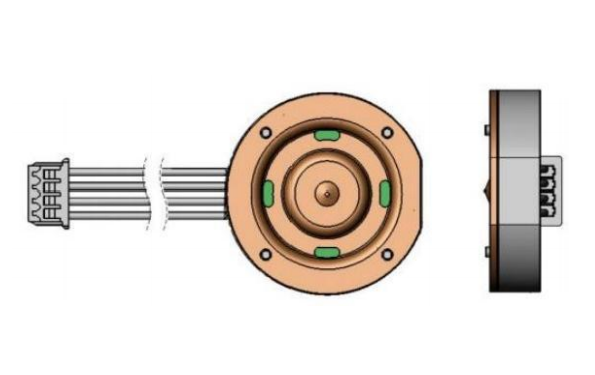
圖2
圖2為PS-CZ00001 Force Sensor的設計圖,其設計的形狀與幾何大小適合放在機械臂安裝鉆頭的位置上,并且不會占用醫生的使用空間,這一點十分重要。而且PS-CZ00001 Force Sensor成本低,很適合用于批量生產,用于手術機器人中也能減少制作成本,所以不管是市場還是技術發展,對比同類型產品,PS-CZ00001 Force Sensor都是一個不錯的選擇。
PS-CZ00001 Force Sensor的其他應用:
?裝配的力測量
?物理治療設備
?病人稱重
?手動工具的力測量
?按摩和運動器械
?消費品監測(復印設備/自動售貨系統)
?家電有效載荷監測(洗衣機、烘干機)
?電器不平衡監測
-
視覺
+關注
關注
1文章
163瀏覽量
24358 -
觸力傳感器
+關注
關注
0文章
7瀏覽量
7603 -
手術機器人
+關注
關注
2文章
138瀏覽量
16142
發布評論請先 登錄
國外手術機器人新技術開發情況
機器人傳感器的類別和應用原理
基于ARM9的DF-1機器人傳感器系統設計
現代機器人中有什么傳感器?
磁性位置傳感器在自動化機器人中的作用
觸力傳感器的原理_觸力傳感器的特點
微型導軌:手術機器人的高精度“骨骼”








 工商網監
工商網監
評論