 移動人形機器人:富唯智能開啟工業柔性自動化新時代
移動人形機器人:富唯智能開啟工業柔性自動化新時代

面對復雜多變的工業環境,傳統關節式人形機器人常因穩定性不足而受限。富唯智能創新性地采用輪式底盤+升降柱設計,在保障全向移動能力的同時,通過機械結構的科學配比解決了作業穩定性難題。
01 結構革新,工業級穩定性突破
富唯移動人形機器人的硬件架構解決了行業長期痛點。傳統雙足機器人在搬運重物時容易晃動,而富智2號的升降柱結構可靈活調節作業高度,在不同高度狀態下均能保持姿態平穩,有效避免了傳統機器人常見的抖動或偏移問題。
這種設計賦予機器人卓越的抗干擾能力。即使在負載變化或地面微傾的工況下,設備仍能穩定運行,為精密作業提供堅實基礎。在新能源車間測試中,當處理8kg重型電池模組時,其升降柱結構保障了舉升過程無晃動,展現了工業級穩定性。
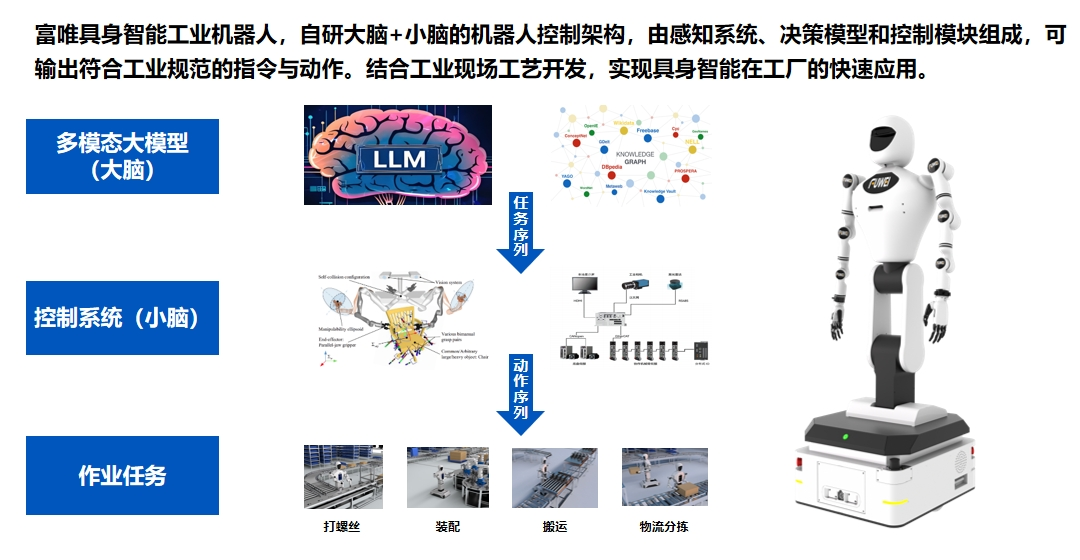
02 智能核心,GRID大模型驅動全局決策
富唯移動人形機器人的“大腦”——具身智能工業機器人任務規劃大模型(GRID),基于語義地圖和知識圖譜進行任務推理與規劃。這個智能中樞讓機器人突破單點作業局限,實現大范圍工廠場景的自主任務規劃。
當面對設備移位、臨時障礙等環境變化時,系統可實時生成魯棒性強的操作指令。其一體化控制系統深度融合環境感知與動作執行,實現任務鏈的動態穩定性。即使執行長序列復合型任務,也能避免傳統機器人因程序割裂導致的動作中斷或路徑沖突,使機器人具備了泛化操作能力。
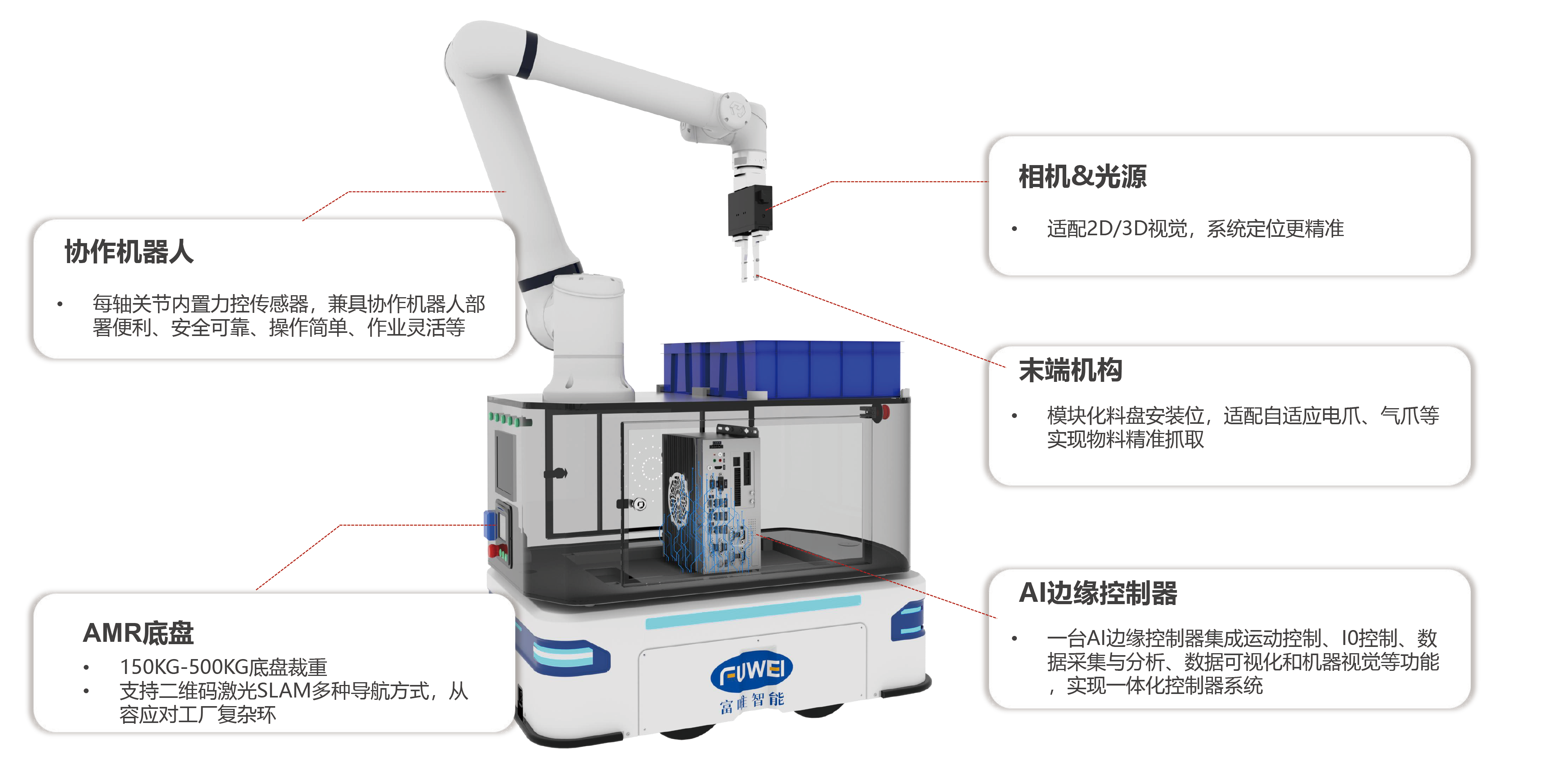
通過與激光SLAM導航、3D避障相機及多傳感器融合,機器人可實時感知動態環境,自主規劃路徑并繞障,確保在復雜車間中安全穿梭。
03 雙臂協同,重新定義制造精度
富唯移動人形機器人搭載雙機械臂協同系統,實現重復定位精度達±0.02mm-±0.05mm,結合3D視覺定位抓取精度±0.2mm。這種精密能力在多個行業創造價值突破:
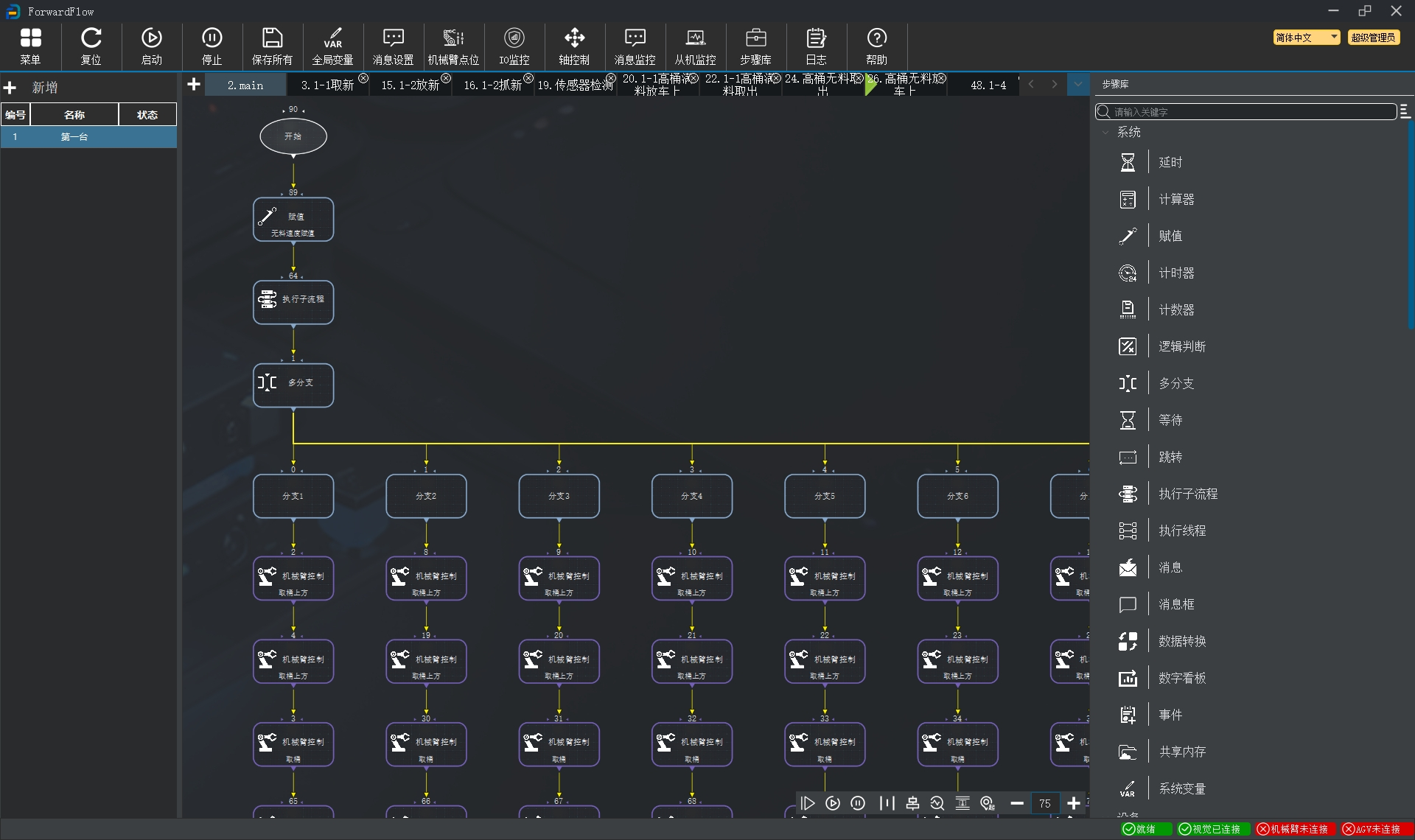
面對毫米級芯片抓取挑戰,機器人實現了99.9%的良品率,顛覆了傳統電子行業的分揀模式。系統搭載AI-ICDP智能調度平臺,支持多機協同作業,結合ForwardControl系統實現零代碼編程,使新任務調試效率提升200%。
04 場景進化,移動能力釋放生產力
移動人形機器人的真正革命性在于打破固定工位的限制。在物流倉儲場景中,這些移動平臺可穩定執行7×24小時物料轉運任務,SLAM導航精度達±5mm,展現出全天候作業能力。
模塊化架構賦予其驚人的場景適應力。基于可重構柔性裝配系統,通過拖拽式編程15分鐘即可完成產線重構,無縫切換跨品類生產。這種靈活性使企業能在接到緊急訂單后,1小時內新增機器人投入生產,產能彈性提升300%。
當傳統機械臂還固定在工位上時,富唯的移動人形機器人已實現跨區域連續作業——從物料倉儲區自主導航至裝配線,再轉運至檢測工位,全流程無人化銜接。
-
人形機器人
+關注
關注
7文章
714瀏覽量
17561 -
大模型
+關注
關注
2文章
3086瀏覽量
3972 -
具身智能
+關注
關注
0文章
131瀏覽量
431
發布評論請先 登錄
裝配領域的智能工匠:富唯智能人形機器人引領精密制造新紀元
GRID大模型:富唯智能人形機器人的“工業大腦”革命



工業機器人的未來發展方向:富唯智能以具身智能重構人機協作新范式

工業機器人高精度控制方法:富唯智能開啟工業制造的“毫米級革命”
智造升級新引擎:具身智能工業機器人仿真軟件推薦與富唯智能的突圍之道
富唯智能 AMR 機器人:開啟智能物流新時代

富唯智能上下料機器人:自動化生產的得力助手

富唯智能復合機器人:CNC 自動上下料的變革利器





 工商網監
工商網監
評論