") 基于模糊控制算法的智能車轉(zhuǎn)向舵機控制
基于模糊控制算法的智能車轉(zhuǎn)向舵機控制
模糊控制算法概述
模糊控制算法是指用于控制變頻器的電壓和頻率的算法,使電動機的升速時間得到控制,以避免升速過快對電動機使用壽命的影響以及升速過慢影響工作效率。模糊控制的關(guān)鍵在于論域、隸屬度以及模糊級別的劃分,這種控制方式尤其適用于多輸入單輸出的控制系統(tǒng)。
模糊邏輯控制(Fuzzy Logic Control)簡稱模糊控制(Fuzzy Control),是以模糊集合論、模糊語言變量和模糊邏輯推理為基礎(chǔ)的一種計算機數(shù)字控制技術(shù)。1965年,美國的L.A.Zadeh創(chuàng)立了模糊集合論;1973年他給出了模糊邏輯控制的定義和相關(guān)的定理。1974年,英國的E.H.Mamdani首次根據(jù)模糊控制語句組成模糊控制器,并將它應用于鍋爐和蒸汽機的控制,獲得了實驗室的成功。這一開拓性的工作標志著模糊控制論的誕生。模糊控制實質(zhì)上是一種非線性控制,從屬于智能控制的范疇。模糊控制的一大特點是既有系統(tǒng)化的理論,又有大量的實際應用背景。模糊控制的發(fā)展最初在西方遇到了較大的阻力;然而在東方尤其是日本,得到了迅速而廣泛的推廣應用。
模糊控制工作原理
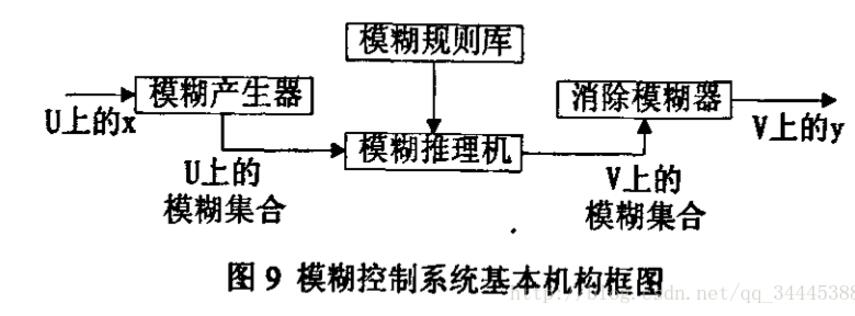
從模糊控制器的構(gòu)成我們知道,輸入模糊化,模糊推理,去模糊化是實施模糊控制的三個主要環(huán)節(jié)。有時根據(jù)這三個環(huán)節(jié)的作用分別稱為:模糊器,模糊推理機和解模糊器。所以要學會使用模糊控制,主要就是弄明白這三個部分的實現(xiàn)方法。
基于模糊控制算法的智能車轉(zhuǎn)向舵機控制
1、智能車尋跡誤差模型建立
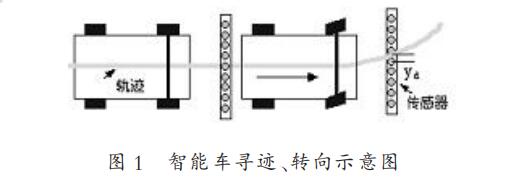
智能車的導向控制利用光電傳感器對路徑進行識別,然后根據(jù)車輛與路徑標線之間的相對位置偏差控制車輛的運行方向,保證車沿著路徑標線運行。我們選擇了光電傳感器尋跡方案作為控制的輸入途徑。如圖1所示小車前排為光電傳感器,r為兩兩相臨之間的傳感器距離,yn為正中光電傳感器與檢測到路徑傳感器之間的距離,位于軌跡上方的為正,下方的為負,則:yn=(m-5)×r(1)
其中:m為檢測到軌跡的傳感器的位置。
2、模糊控制的引入
分析系統(tǒng)后可知,由于小車機械部分以及電路部分的復雜性,使得系統(tǒng)很難建立精確的數(shù)學模型。因此,我們在這里考慮使用模糊控制的辦法,從理論上建立模糊控制過程,以完善整體控制體系。模糊控制過程如圖2所示。
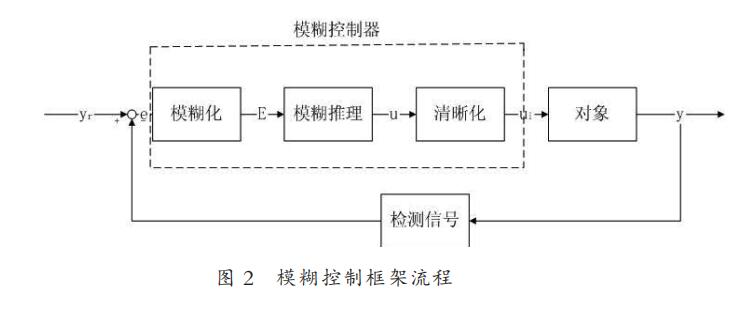
Yr:系統(tǒng)輸出,即小車舵機偏轉(zhuǎn)方向。
Y:系統(tǒng)設定輸入,即尋跡線上小車的正方向中央位置。
圖中模糊控制器由單片機編程模塊實現(xiàn),反饋信號由紅外對管傳感器模塊采集,控制對象為小車舵機偏轉(zhuǎn)方向與角度。
其中模糊控制器的設計如下:
1)模糊化小車偏離位置
設小車左偏方向為負方向,右偏方向為正方向,其偏離范圍e(論域,單位為cm)為[-7.5,7.5],在將論域離散化為整數(shù)集E=[-6,-5,…,5,6],則量化因子k=n/x=12/15=0.8。
接下來做如下設定:
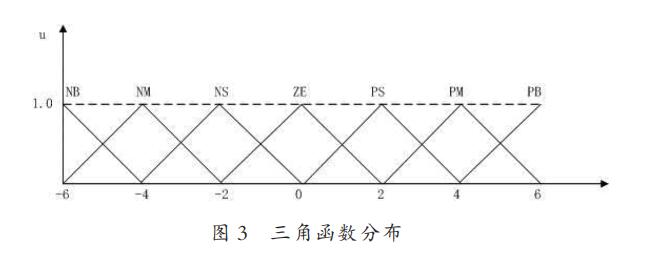
“負大”(NB):[-6,-4],左偏特大。
“負中”(NM):[-6,-2],左偏較大。
“負小”(NS):[-4,0],左偏較小。
“零”(ZE):[-2,2],正中。
“正小”(PS):[0,4],右偏較小。
“正中”(PM):[2,6],右偏較大。
“正大”(PB):[4,6],右偏特大。
設隸屬函數(shù)為三角函數(shù)分布,如圖3所示。
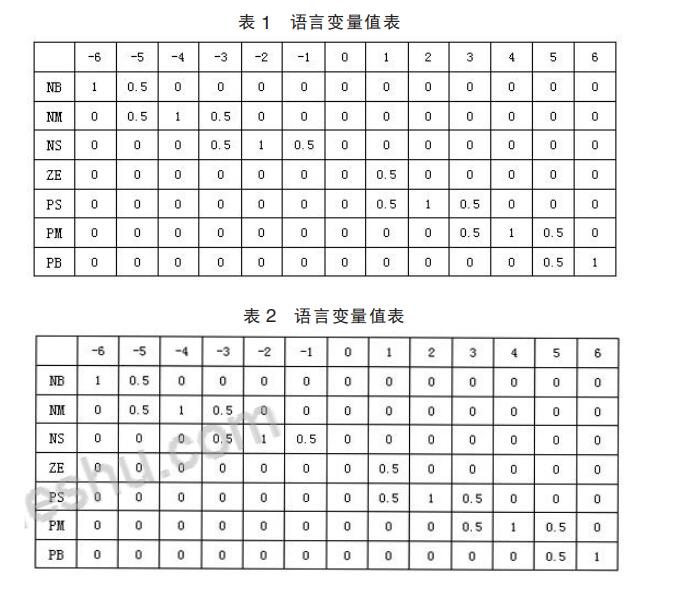
用表1表示偏離位置的語言變量值表。
2)模糊化控制量u(偏轉(zhuǎn)方向與角度)
u的論域為[-36,36],將其離散化為整數(shù)集N=[-6,-5,…,5,6]。取PB,PM,PS,ZE,NS,NM,NB七個語言變量值檔次,與偏離位置類似表1以下語言變量值表2。
3)控制規(guī)則
控制規(guī)則如表3所示。

4)模糊推理
采用CRI推理查表法,即直接通過輸入量(偏差E)與控制規(guī)則比較得出控制量(偏轉(zhuǎn)角U)。
5)模糊量的清晰化
采用重心法,即將模糊化的輸出量(模糊集)的各個元素與其對應的論域值相乘取平均值,用公式表示如下:
3、舵機轉(zhuǎn)向系統(tǒng)的控制策略及算法
基于前面的模糊控制模型,程序算法的設計包括:對傳感器檢測到的信號進行量化(便于模糊化處理),對應舵機偏轉(zhuǎn)角的計算。另外為了避免從直道入彎的過沖,和從彎道進入直道的振蕩問題,程序中還需要對速度進行控制。
1)量化的過程
為了方便處理,我們將所得到的傳感器的信號量化到[1,2,3,…,22,23,24],具體量化過程如下:
a.將傳感器(傳感器的布局見傳感器模塊)從右至左依次編號為1,2,…,11,12。
b.由于傳感器分布比較密,可能會出現(xiàn)幾個(一般為一到兩個)傳感器同時檢測到黑線的情況,取其中的最大和最小值之和作為檢測到的參數(shù)(如果只有一個傳感器檢測到黑線,那么最大值與最小值相同)。
2)舵機偏轉(zhuǎn)角的計算
對于這個模糊控制問題來說,整個推理過程較為簡單,沒必要通過設計專門的程序來計算,我們是通過計算來得到最后的舵機偏轉(zhuǎn)角,具體計算推理過程如下:
a.如前所述,將傳感器的設計位置投影到基準線上得到的對應偏差從左到右依次為-7.5,-6.7,…,6.7,7.5。其中-7.5,-5,-2.5,0,2.5,5,7.5與整數(shù)集E的-6,-4,-2,0,2,4,6對應,近似與上面的量化處理之后的24,20,16,13,10,6,2對應。這樣的話,上面的量化結(jié)果可用Zadeh表示法來表示其在論域E上的模糊集合,如:19的位置可以表示為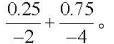
b.由控制規(guī)則知,N中的-6,-4,-2,0,2,4,6對應的輸出結(jié)果(偏轉(zhuǎn)角度模糊量E)依次為-6,-4,-2,0,2,4,6。通過模糊推理之后,可得到各量化結(jié)果的輸出量(模糊量),可用Zadeh表示法表示在論域U上,如19對應的輸出結(jié)果(模糊量)可以表示為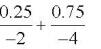
c.再通過重心法清晰化后得到各量化結(jié)果對應的輸出結(jié)果,如-2對應的輸出結(jié)果為7度,-4對應的結(jié)果大約為21度,則19對應的輸出結(jié)果(清晰量)為0.25×7+21×0.75=17.5。
d.另外為了使得傳感器在直道上跑的時候比較平穩(wěn),量化值10到16的輸出結(jié)果做適當調(diào)整,使得中間的12,13,14的對應的輸出量為0度,其它的相應調(diào)整使得角度變化較為平均。
3)速度的控制
由于釆用勻速時,當小車從直道入彎時,可能會產(chǎn)生過沖,和從彎道進入直道有時會有振蕩,所以必須要調(diào)節(jié)速度。具體做法是:在檢測到傳感器偏出時立即減速,當從偏出回到中心位置時再恢復原速。
4、試驗結(jié)果
實驗結(jié)果表明,把制作好的智能小車放到特定的軌道上進行試驗,如圖4、圖5、圖6,小車都能夠很好的、快速的在規(guī)定的軌道內(nèi)行駛。基于模糊控制的轉(zhuǎn)向控制器在直線、“S”形路徑和大轉(zhuǎn)彎路徑處行駛時都可以實現(xiàn)智能車輛的轉(zhuǎn)向控制,轉(zhuǎn)向穩(wěn)定性較好。
制臺調(diào)用學習模塊,配置和調(diào)整隸屬函數(shù)和權(quán)重值,從而適宜外界環(huán)境的變化;另一方面當工作方式為在線狀態(tài)下,IIDS系統(tǒng)主要是針對非法用戶行為進行檢測,首先搜索存儲系統(tǒng)Mysql數(shù)據(jù)庫中的三類行為記錄表,如果在某類表中存在且次數(shù)大于等于三次的用戶,則直接觸發(fā)響應機制;否則,則采用模糊綜合評判分析法對此非法行為進行檢測,最后再觸發(fā)響應機制。
智能響應模塊采用的是主動響應,而不是被動響應。它根據(jù)不同的入侵行為主動采取相應的措施,它通過與防火墻的聯(lián)動來阻止入侵,并對存儲系統(tǒng)進行動態(tài)修改。
網(wǎng)格管理控制平臺:它是基于網(wǎng)格的入侵檢測系統(tǒng)的集中控制管理單元,通過該系統(tǒng)的統(tǒng)一控制,使得新建的入侵檢測網(wǎng)格子系統(tǒng)與其他已經(jīng)存在的各個子系統(tǒng)通過統(tǒng)一的規(guī)范,實現(xiàn)各子系統(tǒng)的互通、互聯(lián)和互操作,在網(wǎng)格管理控制平臺的統(tǒng)一協(xié)調(diào)控制下發(fā)揮出入侵檢測網(wǎng)格系統(tǒng)的最大功用。
-
智能車
+關(guān)注
關(guān)注
21文章
409瀏覽量
77410 -
模糊控制算法
+關(guān)注
關(guān)注
0文章
6瀏覽量
3960 -
轉(zhuǎn)向控制
+關(guān)注
關(guān)注
0文章
2瀏覽量
2111
發(fā)布評論請先 登錄
labview智能車參考程序(fuzzy 控制)
基于光電管路徑識別的智能車系統(tǒng)設計
請問智能車怎么依靠舵機實現(xiàn)左右轉(zhuǎn)向?
一次暑假課程的智能車設計 精選資料分享
雙舵機模糊控制在智能車控制中的應用介紹
基于單目視覺的智能車速度模糊控制系統(tǒng)
基于路徑識別的智能車系統(tǒng)設計
基于單目視覺的智能車速度模糊控制系統(tǒng)
基于模糊控制的智能車調(diào)速系統(tǒng)的設計
智能車舵機控制算法詳解
飛思卡爾智能車舵機和測速的控制設計與實現(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論