 全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux-RT應用開發案例
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux-RT應用開發案例

前言
本文主要通過Cyclictest延遲檢測工具,以及基于Linux-RT的應用程序評估Linux-RT系統的實時性,適用開發環境如下:
Windows開發環境:Windows 7 64bit、Windows 10 64bit
Linux開發環境:VMware16.2.5、Ubuntu22.04.5 64bit
U-Boot:U-Boot-2017.09
Kernel:Linux-6.1.115、Linux-RT-6.1.115
LinuxSDK:LinuxSDK-[版本號](基于rk3576_linux6.1_release_v1.1.0)
Linux-RT性能測試結果如下表所示。
表 1
我司默認使用的是Linux內核,同時提供了Linux-RT內核位于產品資料“4-軟件資料LinuxKernelimagelinux-6.1.115-[版本號]-[Git系列號]”目錄下。請按照如下方法替換為Linux-RT內核。
將Linux-RT內核鏡像boot-rt.img拷貝至評估板文件系統任意目錄下。執行如下命令,替換內核鏡像至Linux系統啟動卡,評估板重啟生效。
備注:mmcblk1p3為Linux系統啟動卡對應的設備節點,如需固化至eMMC,請將設備節點修改為mmcblk0p3。
Target# dd if=boot-rt.img of=/dev/mmcblk1p3
Target# sync
Target# reboot
 圖 1
圖 1
 圖 2?Linux-RT內核
圖 2?Linux-RT內核
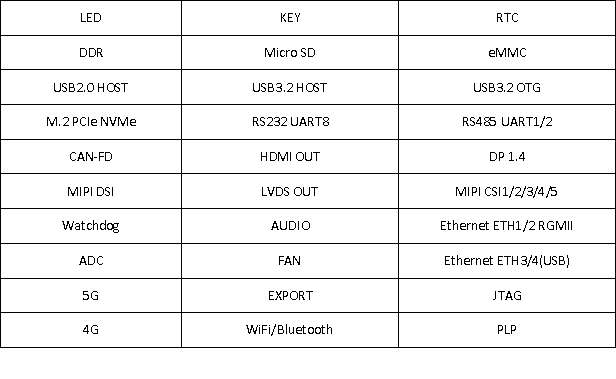
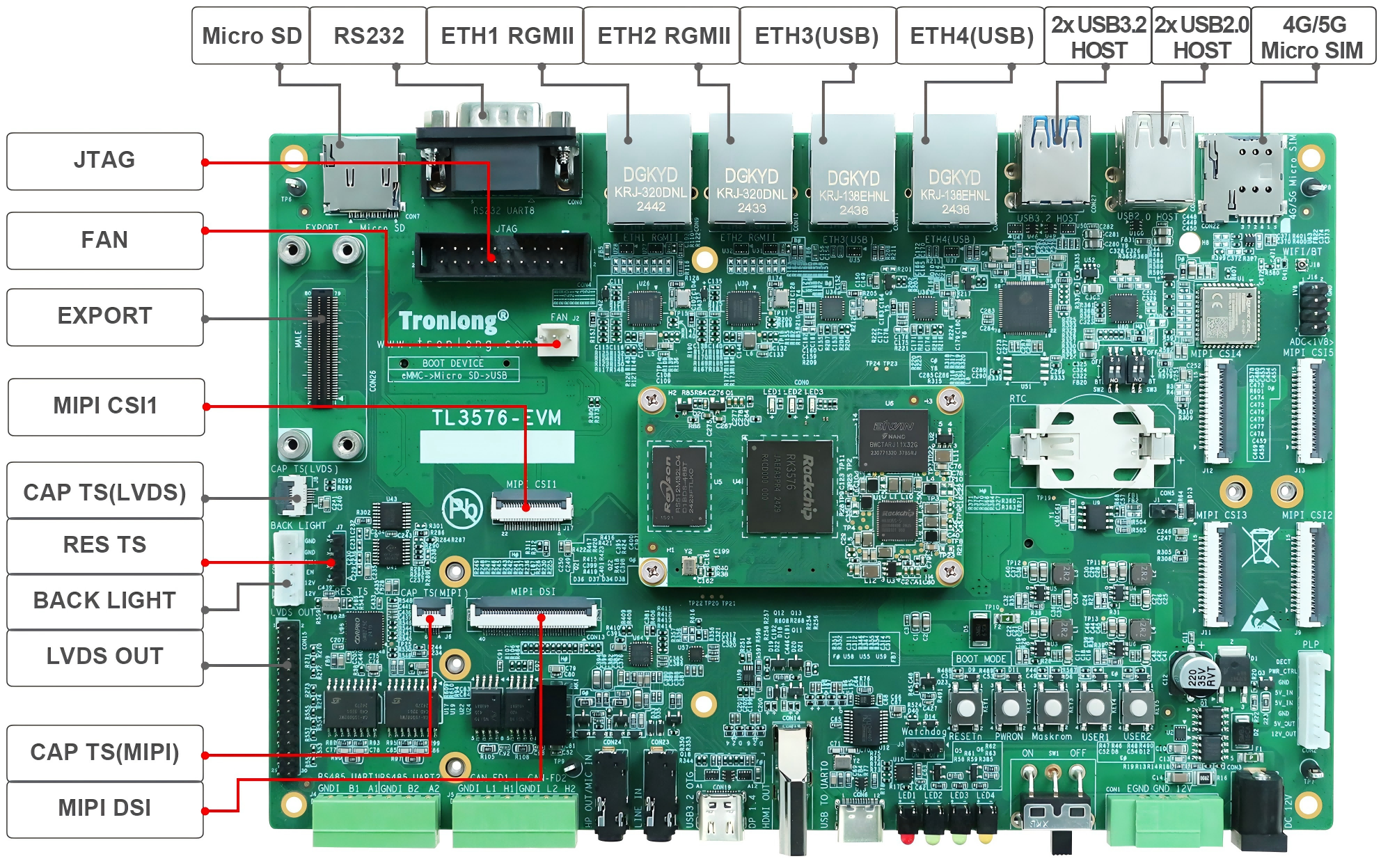
我司提供的Linux-RT內核與Linux內核測試方法一致,請參考《評估板測試手冊》進行測試即可,Linux-RT內核支持的外設接口如下表所示。
表 2
我司提供的Linux-RT內核應用了開源的RT PREEMPT機制進行補丁。PREEMPT_RT補丁的關鍵是最小化不可搶占的內核代碼量,同時最小化必須更改的代碼量,以便提供這種附加的可搶占性。Linux-RT內核增加PREEMPT_RT補丁后,增加了系統響應的確定性和實時性,但是代價是CPU性能降低。
Linux-RT內核與普通Linux內核相比,幾個主要的相同之處是:
具有相同的開發生態系統,包括相同工具鏈、文件系統和安裝方法,以及相同的POSIX API等。
仍然存在內核空間和用戶空間的劃分。
Linux應用程序在用戶空間中運行。
Linux-RT內核與普通Linux內核在常規編程方式上的幾個主要不同之處是:
調度策略。
優先級和內存控制。
基于Linux-RT內核的應用程序使用了調度策略后,系統將根據調度策略對其進行調優。
Linux系統實時性測試
本章節主要介紹使用Cyclictest延遲檢測工具測試Linux系統實時性的方法。Cyclictest是rt-tests測試套件下的一個測試工具,也是rt-tests下使用最廣泛的測試工具,一般主要用來測試內核的延遲,從而判斷內核的實時性。
Cyclictest常用于實時系統的基準測試,是評估實時系統相對性能的最常用工具之一。Cyclictest反復測量并精確統計線程的實際喚醒時間,以提供有關系統的延遲信息。它可測量由硬件、固件和操作系統引起的實時系統的延遲。
為了測量延遲,Cyclictest運行一個非實時主線程(調度類SCHED_OTHER),該線程以定義的實時優先級(調度類SCHED_FIFO)啟動定義數量的測量線程。測量線程周期性地被一個到期的計時器(循環報警)所定義的間隔喚醒,隨后計算有效喚醒時間,并通過共享內存將其傳遞給主線程。主線程統計延遲值并打印最小、最大和平均延遲時間。
參考鏈接:https://wiki.linuxfoundation.org/realtime/documentation/howto/tools/cyclictest/start?s[]=cyclictest。
Linux、Linux-RT實時性對比
本次測試結合Iperf和Cyclictest工具,對比測試基于Linux-RT-6.1.115內核和Linux-6.1.115內核的系統實時性能。此處使用Iperf工具不斷觸發系統中斷,提高中斷處理負載,以便更好測試系統實時特性。
在Ubuntu執行如下命令查看IP地址,并以服務器模式啟動Iperf測試。
Host# ifconfig
Host# iperf3 -s
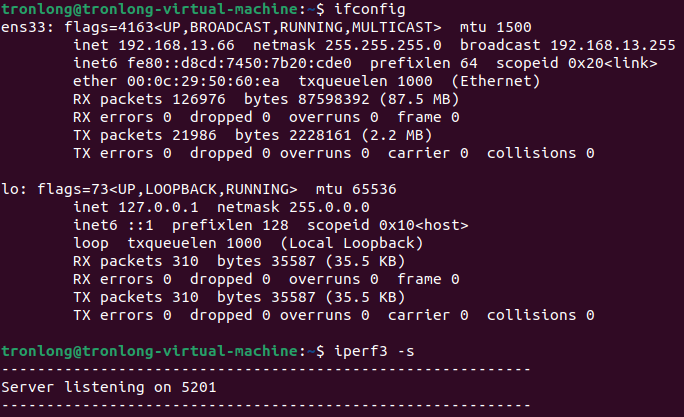 圖 3
圖 3
分別使用Linux-RT-6.1.115內核和Linux-6.1.115內核啟動評估板,執行如下命令以客戶端模式啟動Iperf,并連接至服務器端(Ubuntu系統)。"192.168.13.66"為Ubuntu的IP地址,"-t3600"設置測試時間為3600秒,"&"表示讓程序在后臺運行。
Target# iperf3 -c 192.168.13.66 -d -t3600 > /dev/null 2>&1 &
 圖 4
圖 4
評估板文件系統默認已提供Cyclictest工具,進入評估板文件系統,執行如下命令使用Cyclictest工具測試系統實時性。
Target# cyclictest -t5 -p98 -m -D10m
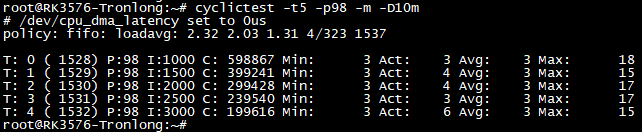 圖 5?Linux-RT-6.1.115內核測試結果
圖 5?Linux-RT-6.1.115內核測試結果
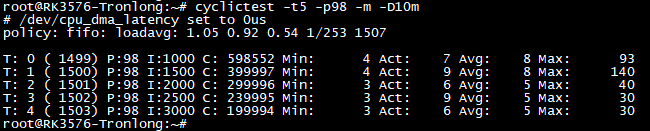 圖 6?Linux-6.1.115內核測試結果
圖 6?Linux-6.1.115內核測試結果
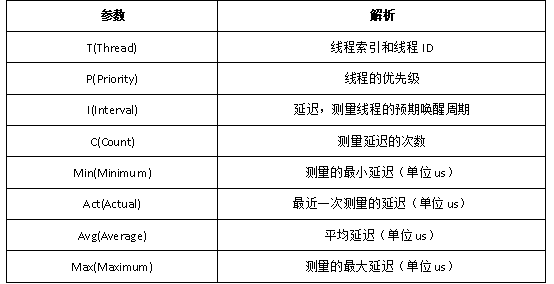
表 3Cyclictest測試結果解析
對比測試數據,可看到基于Linux-RT-6.1.115內核的系統的延遲更加穩定,平均延遲、最大延遲更低,系統實時性更佳。
Cyclictest命令參數解析可執行"cyclictest --help"查看,如下圖所示。
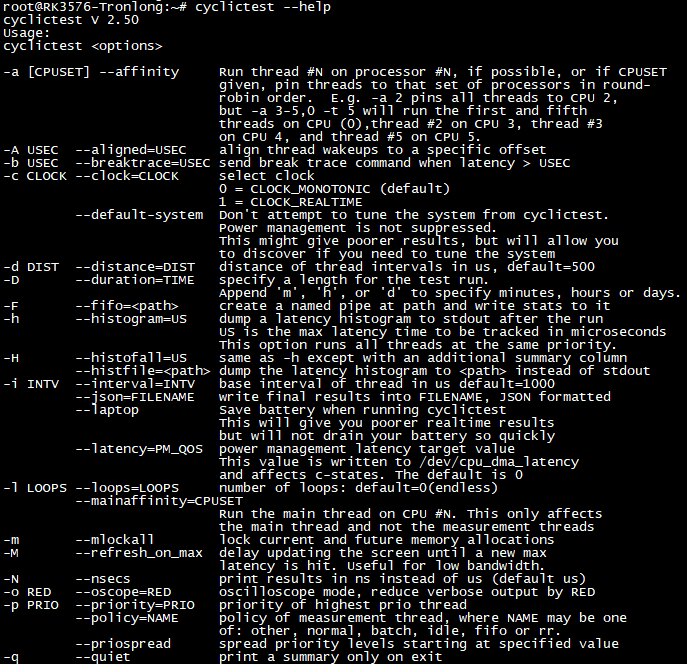 圖 7
圖 7
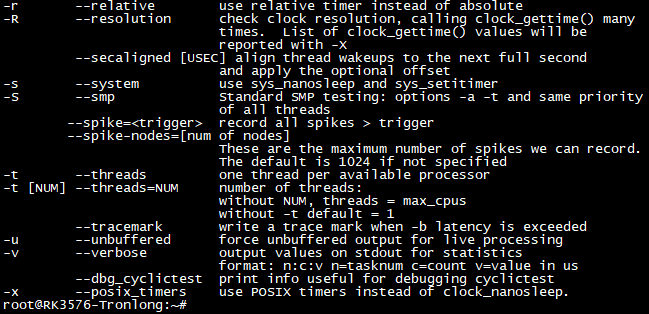 圖 8
圖 8
Linux-RT性能測試
本次測試分別在CPU空載、滿負荷(運行stress壓力測試工具)、隔離CPU核心的情況下,對比評估Linux-RT內核的系統實時性。
CPU空載狀態
評估板上電啟動,進入評估板文件系統執行如下命令,修改內核printk日志等級,避免內核打印信息影響實時測試。
Target# echo 1 > /proc/sys/kernel/printk
調整內存分配策略為“1”,禁用內存過度使用。避免出現OOM(Out-of-Memory) Killer攻擊某些進程而產生延遲,影響測試結果。
Target# echo 1> /proc/sys/vm/overcommit_memory
 圖 9
圖 9
執行如下命令,基于CPU空載狀況下測試系統的實時性。測試指令需運行12小時,請保持評估板長時間穩定工作,測試完成后將生成統計結果no_load_output文件。
Target# cyclictest -m -Sp99 -i1000 -h800 -D12h -q>no_load_output
 圖 10
圖 10
參數解析:
-m:鎖定當前和將來的內存分配;
-S:采用標準SMP測試;
-p:設置線程優先級;
-i:設置線程的基本間隔;
-h:運行后將延遲直方圖轉儲至標準輸出,亦可指定要跟蹤的最大延時時間(以微秒為單位);
-D:指定測試運行時長,附加m(分鐘)、h(小時)、d(天)指定;
-q:運行時不打印相關信息;
CPU滿負荷狀態
評估板上電啟動,進入評估板文件系統執行如下命令,修改內核printk日志等級,避免內核打印信息影響實時測試。
Target# echo 1 > /proc/sys/kernel/printk
調整內存分配策略為“1”,禁用內存過度使用。避免出現OOM(Out-of-Memory) Killer攻擊某些進程而產生延遲,影響測試結果。
Target# echo 1> /proc/sys/vm/overcommit_memory
 圖 11
圖 11
執行如下命令,運行stress壓力測試工具,使得CPU處于滿負荷狀態。再使用Cyclictest工具測試CPU滿負荷狀態下的系統實時性能。測試指令需運行12小時,請保持評估板長時間穩定工作,測試完成后將生成統計結果overload_output文件。
Target# stress --cpu 8--io 8--vm 8--vm-bytes 64M --timeout 43200s &
Target# cyclictest -m -Sp99 -i1000 -h800 -D12h -q > overload_output
 圖 12
圖 12
參數解析:
--cpu:指定壓力測試的進程個數;
--io:指定I/O測試的進程個數;
--vm:指定內存測試的進程個數;
--vm-bytes:指定每個內存測試進程中分配內存的大小;
--timeout:指定測試時長;
隔離CPU核心狀態
本次測試以隔離CPU3核心為例,通過降低系統上所運行的其他進程對隔離CPU3產生的延遲影響,確保CPU3進程的正常運行,進而評估Linux-RT內核的系統實時性。
評估板上電啟動后,在U-Boot倒計時結束之前長按"Ctrl + C"鍵進入U-Boot命令行模式,執行如下命令,修改環境變量,隔離CPU3核心。
備注:如從eMMC啟動,請將命令中的"sd"修改為"emmc"。
U-Boot# setenvbootargs"storagemedia=sdandroidboot.storagemedia=sdandroidboot.mode=normalisolcpus=3"
U-Boot# saveenv
U-Boot# reset
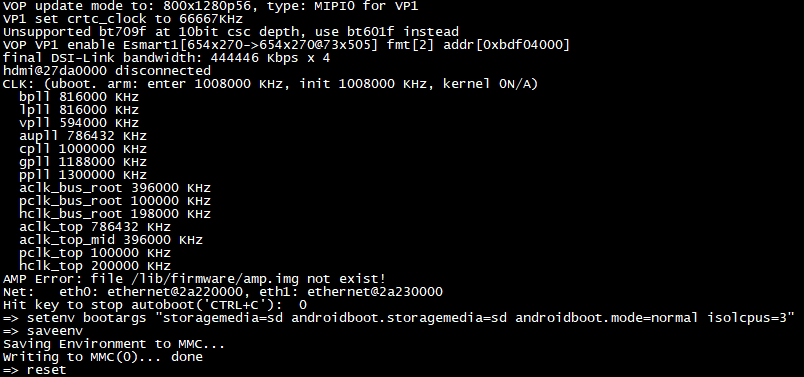 圖 13
圖 13
進入評估板文件系統,執行如下命令,查看環境變量是否設置成功。
Target# cat /proc/cmdline
 圖 14
圖 14
執行如下命令,修改內核printk日志等級,避免內核打印信息影響實時測試。
Target# echo 1 > /proc/sys/kernel/printk
調整內存分配策略為“1”,禁用內存過度使用。避免出現OOM(Out-of-Memory) Killer攻擊某些進程而產生延遲,影響測試結果。
Target# echo 1> /proc/sys/vm/overcommit_memory
 圖 15
圖 15
執行如下命令,運行stress壓力測試工具,使得CPU處于滿負荷狀態。再使用taskset工具將cyclictest測試程序運行在CPU3核心,測試CPU3核心滿負荷狀態下的系統實時性能。測試指令需運行12小時,請保持評估板長時間穩定工作,測試完成后將生成統計結果iso_overload_output文件。
Target# stress --cpu 8--io 8--vm 8--vm-bytes 64M--timeout 43200s &
Target# taskset -c 0-7cyclictest -m -Sp99 -i1000 -h800 -D12h -q > iso_overload_output
 圖 16
圖 16
統計結果分析
我司已提供腳本文件get_histogram.sh用于繪制統計結果直方圖,位于產品資料“4-軟件資料Demolinux-rt-demosCyclictestbin”目錄下,請將該腳本文件拷貝至Ubuntu工作目錄下。
執行如下命令,賦予get_histogram.sh腳本可執行權限。
Host# chmod a+x get_histogram.sh
 圖 17
圖 17
在Ubuntu系統執行如下命令,安裝gnuplot工具。
Host# sudo apt-get install gnuplot -y
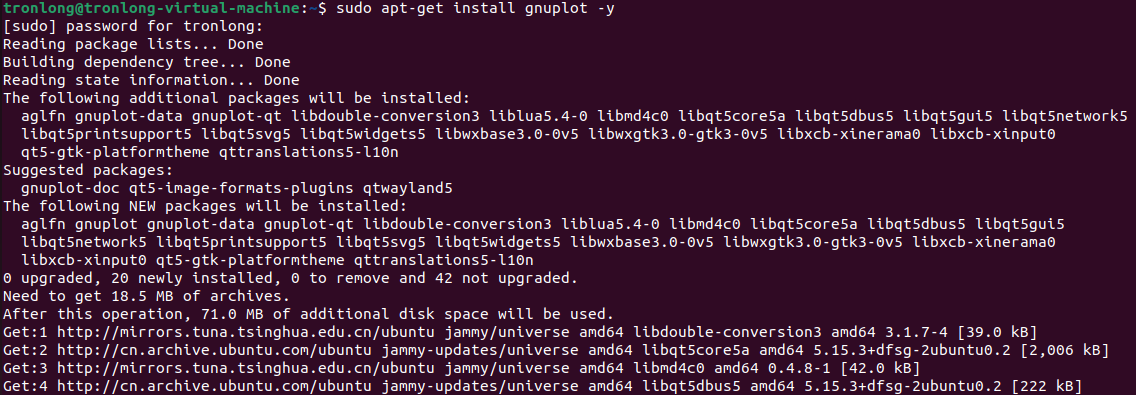 圖 18
圖 18
CPU空載狀態
請將CPU空載狀態下的統計結果no_load_output文件拷貝至Windows工作目錄,使用Windows文本工具打開該文件并拖動至文件末尾,可查看Linux系統每個核心(CPU0~CPU7)的最小延遲(MinLatencies)、平均延遲(AvgLatencies)、最大延遲(MaxLatencies)統計結果。
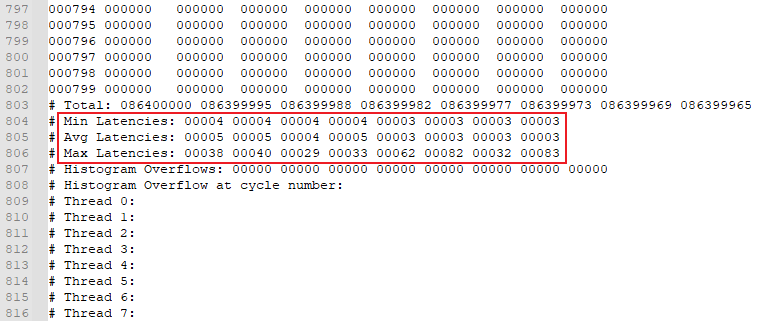 圖 19
圖 19
請將CPU空載狀態下的統計結果no_load_output文件拷貝至Ubuntu,存放在get_histogram.sh同一目錄下。
執行如下命令,拷貝并修改CPU空載狀態下的統計結果文件名為output,并生成直方圖文件plot.png,請將其拷貝至Windows下打開。
備注:滿負荷狀態統計結果文件overload_output與隔離CPU核心狀態統計結果文件iso_overload_output亦需將文件名修改為output方可生成直方圖文件plot.png。
Host# cp no_load_output output
Host# ./get_histogram.sh
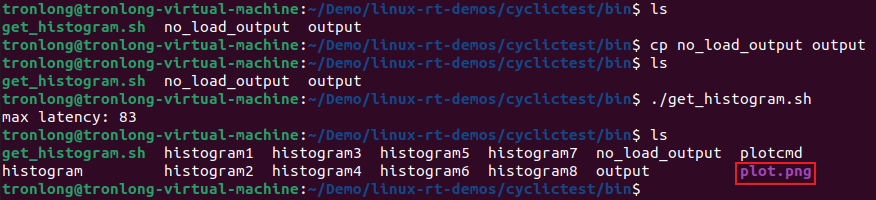 圖 20
圖 20
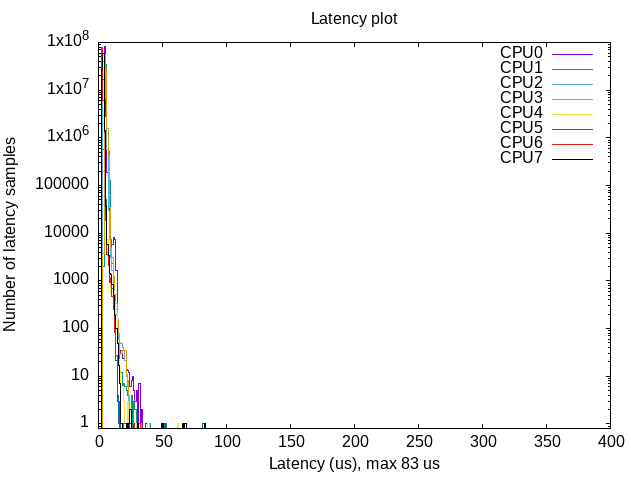 圖 21
圖 21
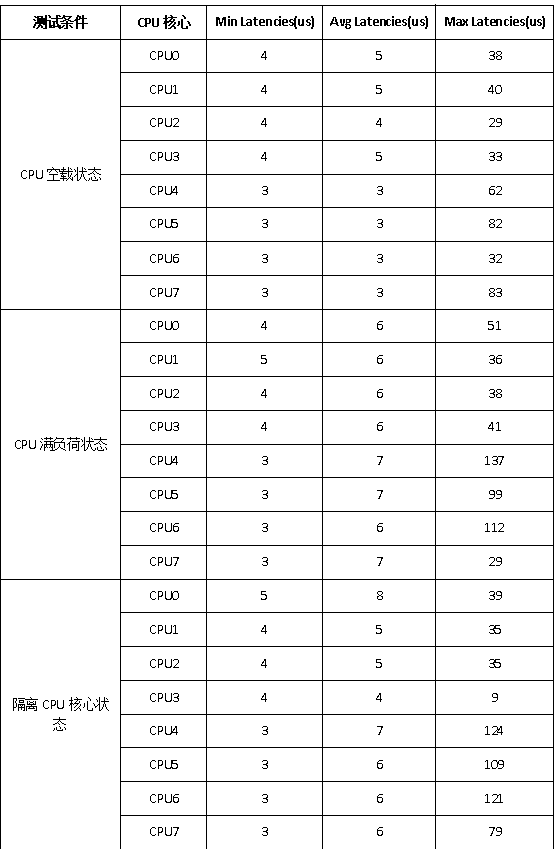
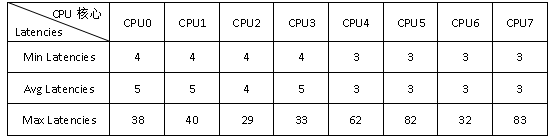
根據統計結果no_load_output文件數據以及結合直方圖,可得主要數據如下表。本次測試中,CPU7核心Max Latencies值最大,為83us,CPU2核心的Max Latencies值最小,為29us。
備注:CPU0~CPU3為Cortex-A53核心,CPU4~CPU7為Cortex-A72核心。由于CPU4~CPU7核心的重調度中斷數量遠大于CPU0~CPU3核心,因此CPU0~CPU3的測試結果會比CPU4~CPU7實時性更好。測試數據與實際測試環境有關,僅供參考。
表 4
CPU滿負荷狀態
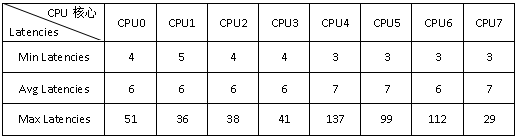
參考如上方法,分析CPU滿負荷狀態下的統計結果如下所示。本次測試中,CPU4核心Max Latencies值最大,為137us,CPU7核心的Max Latencies值最小,為29us。
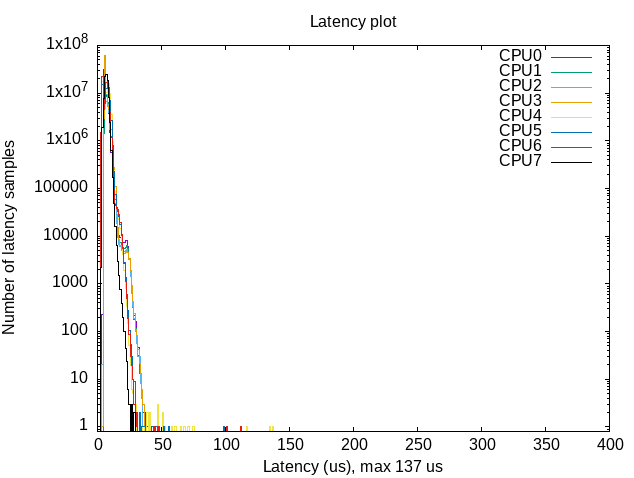 圖 22
圖 22
表 5
隔離CPU核心狀態
參考如上方法,分析隔離CPU核心狀態下的統計結果如下所示。本次測試中,CPU4核心核心Max Latencies值最大,為124us,隔離CPU3核心的Max Latencies值相比CPU空載狀態、CPU滿負荷狀態時CPU3核心的Max Latencies值最小,為9us。
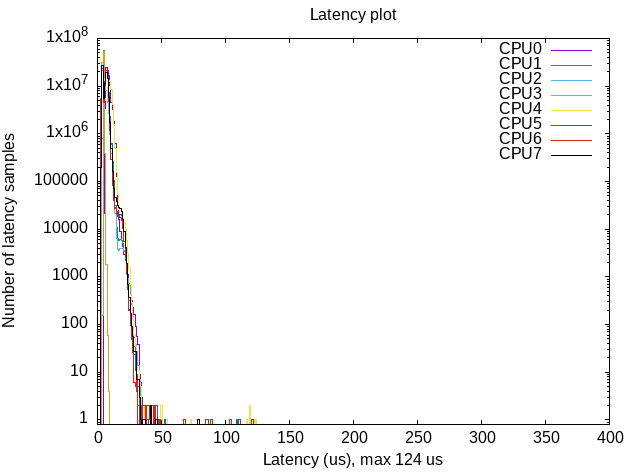 圖 23
圖 23
表 6
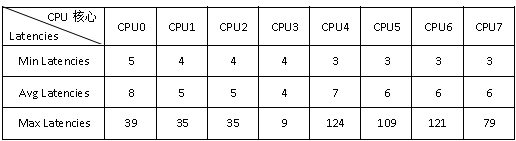
根據CPU空載、CPU滿負荷、隔離CPU核心三種狀態的測試結果可知:當程序指定至隔離的CPU3核心上運行時,Linux系統延遲降低,可有效提高系統實時性。故推薦對實時性要求較高的程序(功能)指定至隔離的CPU核心運行。
由于篇幅過長等原因,部分內容均不逐一展示,如需獲取完整版詳細資料,請關注創龍科技微信公眾號或官網,或者評論區留言,感謝您的支持!
審核編輯 黃宇
-
Linux
+關注
關注
87文章
11496瀏覽量
213244 -
開發板
+關注
關注
25文章
5622瀏覽量
103575 -
瑞芯微
+關注
關注
25文章
561瀏覽量
52310
發布評論請先 登錄
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux應用開發手冊
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux開發環境搭建
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—Linux系統使用手冊
全國產!瑞芯微 RK3576 ARM 八核 2.2GHz 工業開發板—LVGL應用開發案例
基于瑞芯微RK3576國產ARM八核2.2GHz A72 工業評估板——Docker容器部署方法說明

國產!瑞芯微3576-Mini(8核2.2GHz)工業評估板規格書
瑞芯微RK3576,8核2.2GHz+6T算力NPU工業核心板說明書






 工商網監
工商網監
評論