") 無功補償四象限含義
無功補償四象限含義
無功補償控制器中的“四象限”是基于有功功率(P)和無功功率(Q)的流動方向劃分的工作狀態(tài)。其核心目的是幫助判斷電網(wǎng)中能量的流向及負(fù)載性質(zhì),從而采取相應(yīng)的補償措施。
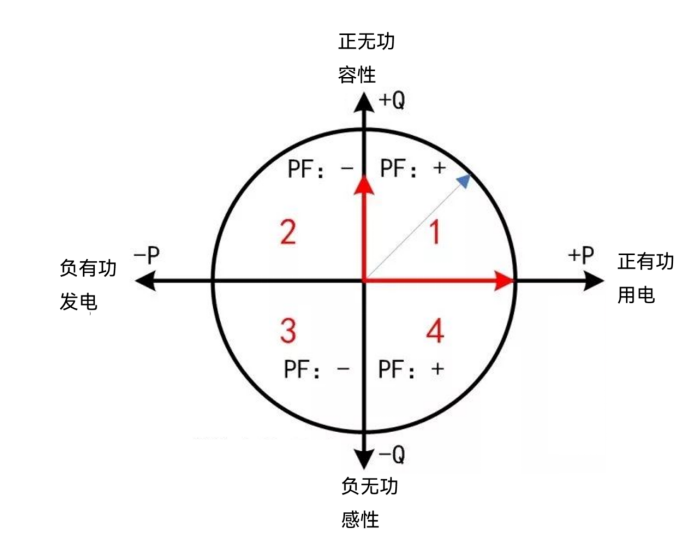
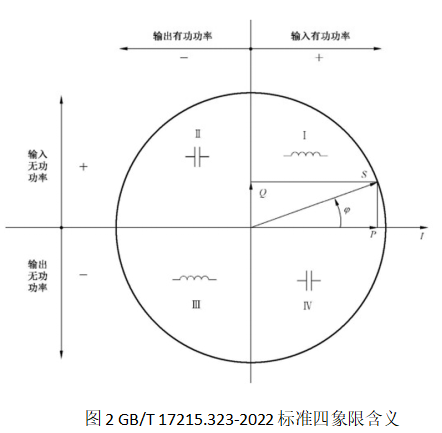
在 GB/T 17215.323-2022 標(biāo)準(zhǔn)中(上圖),功率因數(shù)的正負(fù)是由有功功率的方向決定的,當(dāng)處于用電狀態(tài)時,有功功率為正,功率因數(shù)即為正;在發(fā)電狀態(tài)有功功率為負(fù),則功率因數(shù)也為負(fù)。有些功率因數(shù)控制器為了能更好的體現(xiàn)以及方便客戶直觀的感受,會根據(jù)無功功率的正負(fù)顯示功率因數(shù),即感性為正,容性為負(fù),方便客戶直觀了解當(dāng)前狀態(tài)無功補償是不足還是超補了。
|
正無功(+Q) 滯后(感性負(fù)載) |
負(fù)無功(-Q) 超前(容性負(fù)載) 過補 |
|
|
正有功(+P) 用電 |
I象限 | IV象限 |
|
負(fù)有功(-P) 發(fā)電 |
II象限 | III象限 |
GB/T 17215.323-2022 標(biāo)準(zhǔn)文本中定義的四象限圖如下所示,與我們前面的描述有些出入:其 II 和 III 象限的感性、容性描述正好與我們上面的描述相反,其原因是標(biāo)準(zhǔn)的 II 和 III象限是站在發(fā)電廠的角度談感性和容性,我們的描述是站在用戶的角度談感性和容性,更方便用戶對自己實際負(fù)載情況理解。
以下是四象限控制器的具體含義及典型應(yīng)用場景:
1.象限Ⅰ(+P,+Q):此象限常見于負(fù)載還需從電網(wǎng)側(cè)吸收有功功率(即用電狀態(tài)),且功率因數(shù)處于滯后,需要投入電容器進行無功補償或者已經(jīng)補償?shù)轿唬üβ室驍?shù)>0.9)的情況。
2.象限Ⅱ(-P,+Q):此象限常見于光伏并網(wǎng),當(dāng)光伏發(fā)電量大于自身負(fù)載用電量(即發(fā)電狀態(tài)),出現(xiàn)向電網(wǎng)進行倒送電,負(fù)載不從電網(wǎng)側(cè)吸收有功功率,導(dǎo)致無功功率占比增大,此時功率因數(shù)大概率變差,也需要投入更多的電容進行補償(比沒有光伏發(fā)電時要補更多的電容)。
3.象限Ⅲ(-P,-Q):此象限常見于光伏并網(wǎng),當(dāng)光伏發(fā)電量大于自身負(fù)載用電量,出現(xiàn)向電網(wǎng)進行倒送電,即負(fù)載不從電網(wǎng)側(cè)吸收有功功率,且功率因數(shù)處于超前狀態(tài)(即控制器功率因數(shù)前出現(xiàn)“-”的情況),即電容過補了。4.象限Ⅳ(+P,-Q):此象限常見于負(fù)載還需從電網(wǎng)側(cè)吸收有功功率,且功率因數(shù)處于超前狀態(tài)(即控制器功率因數(shù)前出現(xiàn)“-”的情況),電容也過補了。
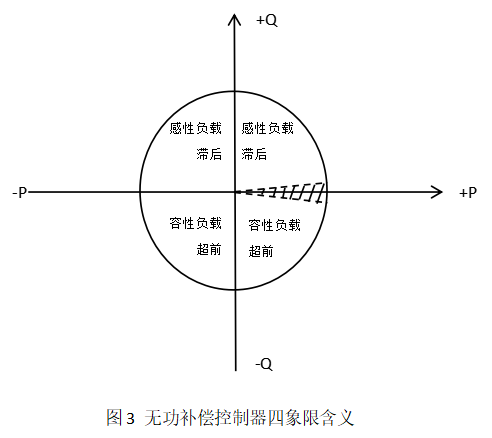
注意:在沒有光伏的前提下,不可能出現(xiàn)第二象限和第三象限的情況,如果有這種情況出現(xiàn)需要考慮接線是否正確(電壓線與電流線不能同相);如果有光伏并網(wǎng),原先處于第一象限可能會變換到第二象限;原先在第四象限可能變換到第三象限,但是只要功率因數(shù)達(dá)標(biāo)就不會有問題。如果出現(xiàn)在第三或第四象限,若功率因數(shù)絕對值大于 0.9,不管正負(fù)都不會出現(xiàn)力調(diào)電費罰款。若從電容的使用壽命考慮,可以切除部分電容,讓其回到第一象限或者第二象限。此前提必須得保障回到第一或第二象限時功率因數(shù)仍能大于 0.9。同時,當(dāng)出現(xiàn)在 I 和 IV 兩個象限之間來回擺動時(詳見圖 3 陰影部分),此時說明負(fù)載在波動,導(dǎo)致功率因數(shù)在 1 附近波動:
A、若波動不大,比如在±0.9 之內(nèi),可以不處理,說明功率因數(shù)已經(jīng)很理想了。
B、若波動幅度超過±0.9,則需要處理,否則可能會導(dǎo)致力調(diào)電費罰款此時有以下幾種可能功率因數(shù)波動很大
(1) 負(fù)載很小,電容太大,不補是滯后小于 0.9;補的話,就變成超前0.9,過補了==》理想解決方案:更換電容,把電容容量變小。(大多數(shù)情況下可以不處理,因為負(fù)載很小,雖然功率因數(shù)很差,但實際負(fù)載小,無功也不大,這種情況大多數(shù)發(fā)生在工廠下班時段,上班后負(fù)載還是能大起來,就基本不用處理,因為電力公司的力調(diào)電費罰款是依據(jù)一個月的平均功率因數(shù),只要上班時段功率因數(shù)達(dá)標(biāo),基本可以忽略下班時段的功率因數(shù))
(2) 負(fù)載已經(jīng)比較大,電容也不大,還是導(dǎo)致功率因數(shù)劇烈波動:此時大概率是諧波導(dǎo)致,諧波無功電容是無法補償?shù)模C波比較大時(比如 THD 超過 40%),若控制器能測量諧波無功,就會功率因數(shù)波動很大。因為此時很可能基波無功已經(jīng)補償?shù)轿涣耍β室驍?shù)低是因為諧波無功導(dǎo)致,負(fù)載變化導(dǎo)致基波功率在 1 附近正負(fù)微小波動(滿足電力公司要求),會帶著諧波無功大幅度波動,導(dǎo)致看到功率因數(shù)劇烈波動,這種情況下只能通過諧波治理,降低諧波比例,才能解決問題,否則功率因數(shù)大概率無法達(dá)標(biāo),會產(chǎn)生力調(diào)電費罰款。
C、同理,在 II 和 III 象限來回波動,與 I 和 IV 象限的波動是一樣的,唯一的差別是 II 和 III 象限波動是發(fā)生在光伏倒送電的情況下。
審核編輯 黃宇
-
電網(wǎng)
+關(guān)注
關(guān)注
13文章
2231瀏覽量
60179 -
無功補償
+關(guān)注
關(guān)注
12文章
556瀏覽量
23237 -
四象限
+關(guān)注
關(guān)注
0文章
7瀏覽量
7502
發(fā)布評論請先 登錄
±10V 四象限乘法 DAC
四象限運行羅氏變換器
四象限變頻器技術(shù)介紹
四象限光電探測器的設(shè)計方案
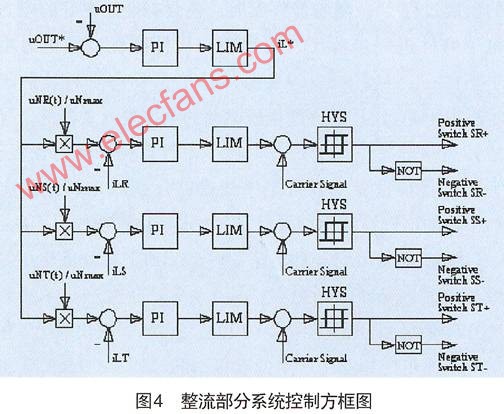
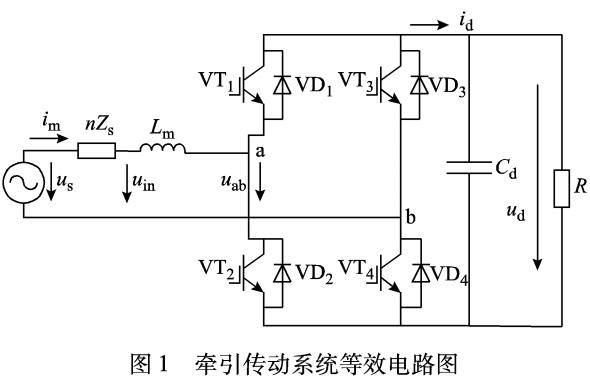
基于DSP的四象限變流器瞬態(tài)直接電流控制

四象限變流器控制方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論