") 陀螺儀航向的漂移誤差可能會隨時間推移而累積嗎?
陀螺儀航向的漂移誤差可能會隨時間推移而累積嗎?

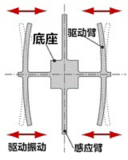
測量角速率的MEMS陀螺儀有多個誤差貢獻因素,偏置不穩(wěn)定性是其中之一。然而,與提供增強性能的分立器件相比,慣性測量單元(IMU)具有多方面優(yōu)勢。六自由度IMU由多個慣性MEMS傳感器組成,這些傳感器經(jīng)過溫度補償和校準,對齊在正交軸上。內(nèi)置三軸陀螺儀測量繞一個已知點的旋轉(zhuǎn),而三軸加速度計測量位移。后處理步驟利用數(shù)字信號處理器或微控制器執(zhí)行,從而在內(nèi)部實現(xiàn)傳感器融合。
陀螺儀會受偏置不穩(wěn)定性影響,由于器件固有的不足和噪聲,陀螺儀的初始零點讀數(shù)會隨時間漂移。偏置可重復性可以在IMU的已知溫度范圍內(nèi)進行校準。然而,恒定偏置不穩(wěn)定性的積分會引起角度誤差。此類誤差會隨著陀螺儀旋轉(zhuǎn)或角度估計的長期漂移而累積。漂移的不良后果是航向計算的誤差會持續(xù)增加而不減退。加速度計則相反,其對振動和其他非重力加速度敏感。
引起陀螺儀漂移的主要原因是兩個因素的結(jié)合:一個是慢速變化的接近DC的變量,稱為偏置不穩(wěn)定性;另一個是較高頻率的噪聲變量,稱為角度隨機游走(ARW)。這些參數(shù)的大小用每單位時間的旋轉(zhuǎn)角度來衡量。偏航軸對此漂移最為敏感。俯仰(姿態(tài))和滾動軸的相當一部分陀螺儀漂移可以在IMU內(nèi)部予以消除,即利用加速度計的反饋結(jié)果監(jiān)控相對于重力的位置。在IMU內(nèi)部利用低通或卡爾曼濾波器對陀螺儀輸出進行濾波,也是廣泛采用的消除部分漂移誤差的方法。
理想情況下,校正所有軸的陀螺儀漂移需要兩個基準。九自由度IMU通常會提供額外的磁力計傳感器——大約三軸。磁力計檢測磁場相對于地磁北極的強度。此類傳感器可以與加速度計數(shù)據(jù)一同使用,作為另一個外部基準,用來降低陀螺儀漂移誤差對偏航軸的影響。然而,設(shè)計適當?shù)目臻g磁力計可能不如加速度計可靠,因為有很多東西會產(chǎn)生與地磁大小差不多的磁場。
另一種更有效的長期漂移消除方法是對陀螺儀實施零角速度更新。只要知道器件處于完全靜止狀態(tài),便可將相應(yīng)軸的陀螺儀偏移歸零。因具體應(yīng)用不同,這樣的機會有很大差異。但只要系統(tǒng)處于重復出現(xiàn)的安靜狀態(tài),例如汽車怠速、自主機器人靜止或人跨腳步之間的時間,就可以進行歸零調(diào)整。
當然,一開始便在設(shè)計中使用偏置不穩(wěn)定性最小的先進IMU,可以最直接地降低陀螺儀漂移。要測量陀螺儀的恒定偏置誤差,可以在器件未旋轉(zhuǎn)時,獲取輸出在較長時間內(nèi)的平均值。IMU艾倫方差曲線顯示陀螺儀漂移(每小時旋轉(zhuǎn)度數(shù))與積分時間(τ)的關(guān)系。它一般是以對數(shù)-對數(shù)比例尺繪制的。
-
陀螺儀
+關(guān)注
關(guān)注
44文章
846瀏覽量
99998 -
IMU
+關(guān)注
關(guān)注
6文章
363瀏覽量
46710
原文標題:誤入歧途的陀螺儀
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
MEMS陀螺儀正在取代光纖陀螺儀?
低成本MEMS陀螺儀如何重塑工業(yè)級運動感知精度?
振動陀螺儀傳感器的工作原理
陀螺儀在鉆井或測井中有何用途?

求助,關(guān)于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
MEMS陀螺儀的尋北原理是什么?精度如何?

求助,關(guān)于傳感器融合庫的使用問題求解
ST的IMU和地磁計用motionfx庫融合后航向角異常的原因?
智能關(guān)停,高速風筒方案中陀螺儀技術(shù)的精準應(yīng)用

愛普生XV7021BB陀螺儀傳感器在人機交互中的應(yīng)用

愛普生XV-9300LP汽車陀螺儀傳感器的特征和用途
愛普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設(shè)備行業(yè)

優(yōu)可測白光干涉儀:激光陀螺儀提升良率與精度的關(guān)鍵
陀螺儀LSM6DSV16X與AI集成(11)----融合磁力計進行姿態(tài)解算

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論