") 小鵬汽車自動駕駛技術(shù)分析
小鵬汽車自動駕駛技術(shù)分析
[首發(fā)于智駕最前沿微信公眾號]小鵬汽車自成立之初便將智能駕駛作為與電動化并駕齊驅(qū)的核心戰(zhàn)略,不僅在產(chǎn)品設(shè)計層面強調(diào)“智駕”標簽,更在技術(shù)研發(fā)投入方面持續(xù)加大力度。截至2024年底,公司累計研發(fā)支出已突破300億元人民幣,這一規(guī)模在造車新勢力中也名列前茅。與多數(shù)車企選擇依賴外部供應(yīng)的做法不同,小鵬堅持“底層自研、全鏈自主”,從傳感器硬件到車端算力、從大模型算法到云端數(shù)據(jù)平臺,構(gòu)建了閉環(huán)式研發(fā)與迭代體系。在創(chuàng)始人與高管團隊的長期戰(zhàn)略定力下,小鵬在AI智能駕駛領(lǐng)域?qū)崿F(xiàn)了從跟隨到并跑、再到局部領(lǐng)先的跨越,為批量化、多品類車型的智能駕駛落地提供了堅實技術(shù)保障。
在技術(shù)架構(gòu)層面,小鵬基于自身十年造車經(jīng)驗和技術(shù)沉淀,提出了SEPA 2.0“扶搖”架構(gòu)。這一架構(gòu)的核心在于平臺化底座,并非單純的車身底盤平臺,而是覆蓋電子電氣、三電系統(tǒng)與硬件一體化的全方位技術(shù)平臺。

X-EEA電子電氣架構(gòu)實現(xiàn)云端至車端的算力-算法-數(shù)據(jù)閉環(huán)。云端Foundation Model參數(shù)規(guī)模已擴展至72B,車端大模型參數(shù)則達到數(shù)十億,并通過蒸餾技術(shù)將大模型壓縮至適合500–1000TOPS算力的車端硬件。在三電系統(tǒng)方面,小鵬全域800V高壓快充+X-Power電驅(qū)集成解決了充電效率、電耗效率以及低溫續(xù)航等一系列技術(shù)難題;此外,包含前后一體化壓鑄和CIB電池車身一體化的硬件一體化技術(shù),不僅有效降低了零部件數(shù)量和制造成本,更大幅優(yōu)化了車身空間利用率和結(jié)構(gòu)剛度,為整車輕量化和多品類共線生產(chǎn)提供了有力支撐。
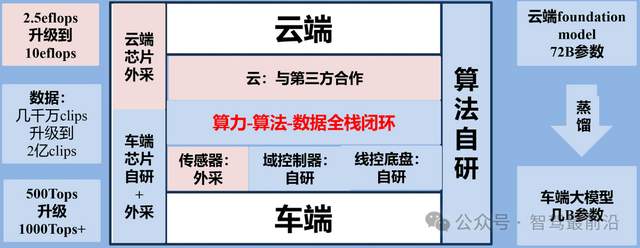
X-EEA電子電氣架構(gòu)
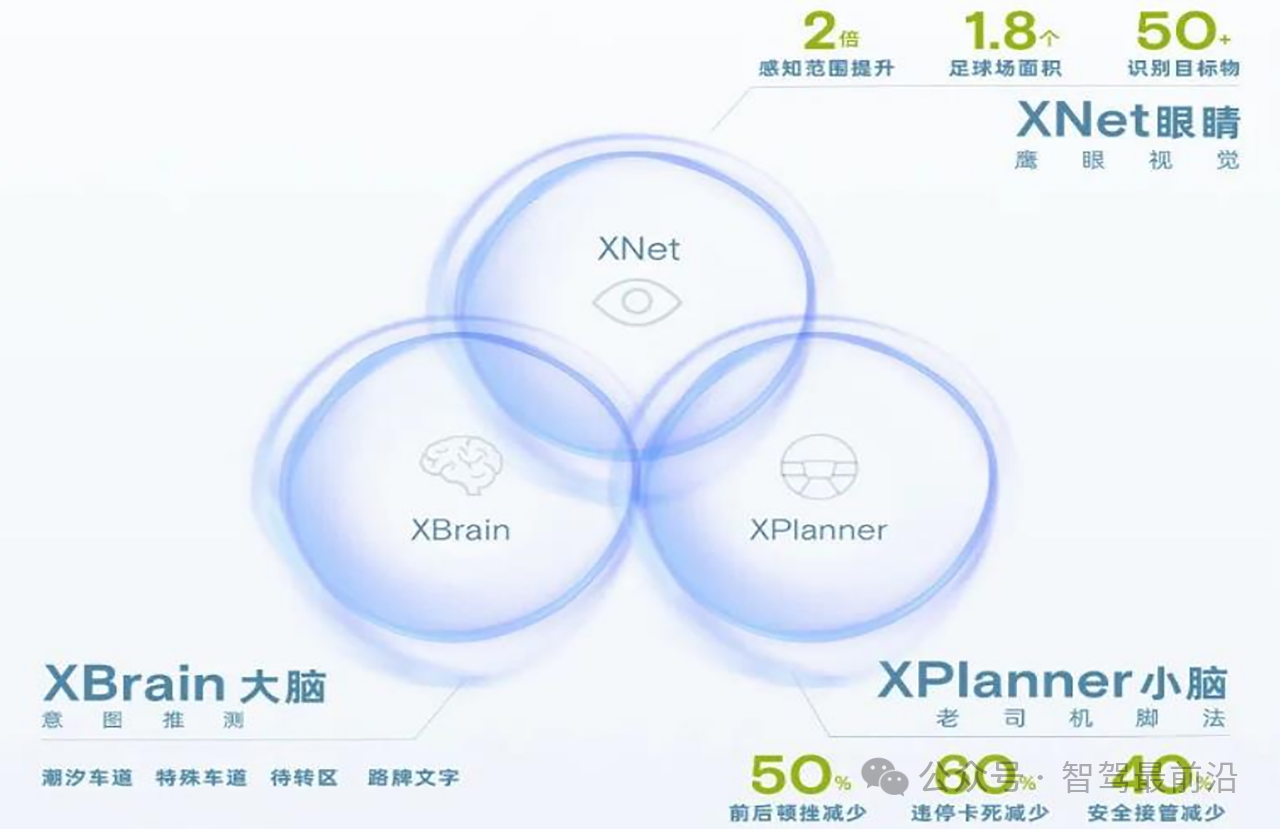
在感知層面,小鵬拋棄了傳統(tǒng)依賴大規(guī)模激光雷達和高精地圖的設(shè)計思路,率先在十周年發(fā)布會上推出AI鷹眼視覺方案。該方案基于全球首創(chuàng)的Lofic架構(gòu),前視與后視攝像頭像素升級至800萬,環(huán)視及側(cè)視攝像頭提升至300萬,能夠在弱光、逆光及大光差環(huán)境中保持高精度感知。相比上一代雙激光雷達方案,AI鷹眼視覺方案在實時感知距離上提升25%,識別速度加快40%,系統(tǒng)端到端時延減少100ms,算力釋放率提升20%,視覺數(shù)據(jù)無需中間轉(zhuǎn)化即可直接進入神經(jīng)網(wǎng)絡(luò)模型,顯著提升了系統(tǒng)響應(yīng)速度和成本效率。從2024年Q4開始,AI鷹眼視覺方案首發(fā)搭載于P7+車型,計劃后續(xù)覆蓋MONA、X9等更多車型,實現(xiàn)高階L3級別城市自動駕駛的規(guī)模化落地。
為了滿足從輔助駕駛到高階自動駕駛對算力的爆發(fā)式增長需求,小鵬自主設(shè)計并成功流片“圖靈”智駕芯片。該芯片采用7nm工藝,集成40核CPU(最高可運行30B參數(shù)的大模型)、2個自研NPU、DSA神經(jīng)網(wǎng)絡(luò)加速器以及雙ISP(分別負責(zé)AI感知與圖像合成),整體算力可達約750TOPS,堪比三顆主流Orin-X芯片之和;獨立安全島設(shè)計確保全車無盲點監(jiān)控,提升系統(tǒng)安全性與可靠性。此外,自研“圖靈”芯片在BOM成本上相較外采方案每顆可節(jié)約約1200元,結(jié)合研發(fā)與流片成本攤銷,大規(guī)模出貨后將顯著優(yōu)化整車成本結(jié)構(gòu),并為未來算法迭代提供更高的硬件適配靈活性。

小鵬、蔚來與英偉達智駕芯片參數(shù)對比
在算法研發(fā)方面,小鵬自動駕駛系統(tǒng)經(jīng)歷了從規(guī)則驅(qū)動到端到端大模型的多輪迭代。最初的Xpilot以Rule-based架構(gòu)實現(xiàn)ACC與LCC等基礎(chǔ)巡航與泊車功能;2021年推出高速NGP,標志公司在輔助駕駛領(lǐng)域具備了行業(yè)領(lǐng)先的落地能力;2023年推出城市NGP無圖化版本,在全國范圍內(nèi)實現(xiàn)無高精地圖覆蓋;2024年XNGP+集成BEV+Transformer大模型,打通感知-預(yù)測-規(guī)劃三網(wǎng),實現(xiàn)真正意義上的端到端一體化決策,并在OTA中持續(xù)迭代XBrain架構(gòu),支持環(huán)島、掉頭及其他復(fù)雜場景,性能與魯棒性不斷提升。未來,小鵬將基于Model Distillation與強化學(xué)習(xí)技術(shù),逐步推進One Model生成式大模型,實現(xiàn)感知、預(yù)測與決策的完全融合,實現(xiàn)系統(tǒng)全面泛化與極端場景下的安全可控。
在云端,小鵬搭建了萬卡級的“云端模型工廠”,算力儲備達10EFLOPS,集群利用率超90%。基于高性能計算與分布式訓(xùn)練平臺,小鵬實現(xiàn)了從1M Clips到200M Clips的訓(xùn)練數(shù)據(jù)擴容,訓(xùn)練帶寬和效率提升5倍。通過Model Distillation技術(shù),將云端基座模型有效蒸餾為車端小模型,并結(jié)合RL強化學(xué)習(xí)與世界模型生成閉環(huán)反饋網(wǎng)絡(luò),實現(xiàn)算法的端云協(xié)同迭代。云端模型工廠不僅支撐了XNGP+的快速上線,也為未來“一鍵升級”更大規(guī)模的生成式端到端大模型提供了數(shù)據(jù)與算力保障。
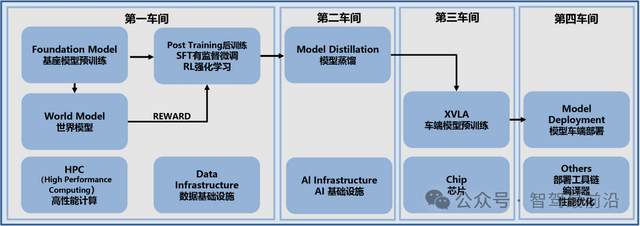
小鵬云端模型工廠
功能級別的迭代則依托強大的OTA能力實現(xiàn)自下而上的持續(xù)進化。自2019年推出XOS 1+版本的LCC車道居中控制,到2020–2022年的XOS 2~3+高速NGP,再到2023年XOS 4+的城市無圖NGP,再到2024年XOS 5+端到端XBrain架構(gòu)的全場景覆蓋,小鵬通過每一次OTA推送都將最新算法、策略與體驗帶給用戶。與競品的單次靜態(tài)更新不同,小鵬實現(xiàn)了對算法參數(shù)、規(guī)則網(wǎng)、模型權(quán)重等多維度的動態(tài)調(diào)整與優(yōu)化,大幅提升了系統(tǒng)對多變道路環(huán)境與極端工況的適應(yīng)能力,并通過實車數(shù)據(jù)持續(xù)閉環(huán)驗證與迭代,確保功能穩(wěn)定性與安全性。

小鵬汽車OTA功能實現(xiàn)階段
面向未來,小鵬已規(guī)劃了自動駕駛技術(shù)的“端到端四部曲”:在2024年Q4實現(xiàn)城區(qū)智駕100%無圖化量產(chǎn);2024年年末將車端大模型參數(shù)量翻倍,并融合輕雷達、輕地圖實現(xiàn)門到門智駕;2026年前后推動云端大模型參數(shù)每版提升5倍,實現(xiàn)類L3級別(百公里接管<1次)的高品質(zhì)智能駕駛體驗;最終在Ultra平臺推出Robotaxi,通過AI Eagle Eye、XBrain、圖靈芯片與云端模型工廠的協(xié)同,實現(xiàn)部分低速場景下的真正意義無人駕駛商業(yè)化運營。在此過程中,小鵬還將借助鯤鵬超級電動體系在增程與純電雙軌并行、AI賦能5C超充電池與AI動力優(yōu)化等方面的協(xié)同,進一步推動智能駕駛與電動化的深度融合,贏得智能出行時代的制高點。
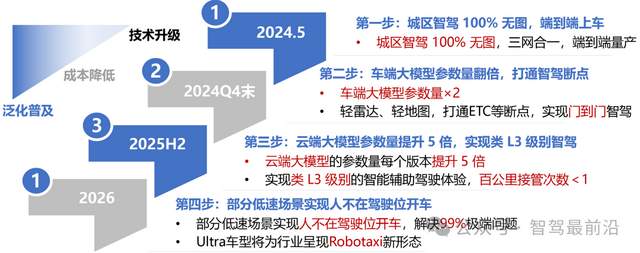
小鵬汽車智能駕駛“端到端四部曲”
綜上所述,小鵬汽車的自動駕駛系統(tǒng)以SEPA 2.0扶搖架構(gòu)為底座,凝聚了從AI視覺感知、自研智駕芯片至端到端大模型的全棧自研能力,并通過OTA、云端模型工廠及精細化團隊組織保證技術(shù)與產(chǎn)品的持續(xù)演進。未來,小鵬將繼續(xù)以創(chuàng)新驅(qū)動為核心,以軟硬一體化、端云協(xié)同為手段,穩(wěn)步推進L3及以上自動駕駛技術(shù)的商業(yè)化,實現(xiàn)高頻次、低成本、安全可控的智能出行服務(wù)。
審核編輯 黃宇
-
自動駕駛
+關(guān)注
關(guān)注
788文章
14204瀏覽量
169586 -
小鵬汽車
+關(guān)注
關(guān)注
4文章
572瀏覽量
15305
發(fā)布評論請先 登錄

NVIDIA Halos自動駕駛汽車安全系統(tǒng)發(fā)布
理想汽車推出全新自動駕駛架構(gòu)
MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
小鵬汽車圖靈芯片及L4自動駕駛新進展
自動駕駛汽車安全嗎?


自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL
從小鵬、理想、蔚來布局看自動駕駛發(fā)展趨勢





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論